Clear Sky Science · pt
Avaliação de algoritmos de controle baseados em inteligência artificial para serem implementados em uma prótese mioelétrica transradial acessível
Novas maneiras de tornar mãos artificiais mais acessíveis
Para milhões de pessoas com amputações do antebraço, especialmente em países de baixa e média renda, mãos artificiais avançadas permanecem inacessíveis devido ao custo e à complexidade técnica. Este estudo explora como programas de computador inteligentes podem traduzir pequenos sinais elétricos dos músculos em movimentos simples da mão, com o objetivo de construir uma mão protética acessível que seja ao mesmo tempo confiável e adaptada a cada usuário. 
Por que os sinais musculares importam
Sempre que movemos as mãos, nossos músculos produzem sinais elétricos fracos que podem ser captados na superfície da pele. Esses sinais, conhecidos como eletromiografia de superfície, podem revelar qual movimento a pessoa está tentando fazer, mesmo que a mão esteja ausente. Muitas próteses modernas dependem desses sinais, mas na prática eles são ruidosos e instáveis. As pastilhas de sensores podem deslocar-se, os músculos podem estar fracos ou cicatrizados, e a posição do braço altera os sinais. Sistemas que funcionam bem em pessoas sem amputação frequentemente falham quando usados por usuários reais de prótese, que podem ter menos músculos funcionais e anatomia mais variada. Essa lacuna dificulta projetar sistemas de controle protético que sejam precisos, confortáveis e acessíveis para quem mais precisa.
Construindo uma base de dados do mundo real
Para enfrentar esse problema, os pesquisadores coletaram um novo conjunto de dados de 20 adultos no Peru que tinham perda de membro ao nível do antebraço, por trauma ou causas congênitas. Cada pessoa usou duas pequenas unidades de sensor sem fio no antebraço residual, com seis pontos de captação distribuídos sobre os principais grupos musculares flexores e extensores. Os participantes tentaram três gestos simples relacionados ao punho — flexão do punho, extensão e pinça com polegar e dedo médio — enquanto sentados e em pé, e em diferentes posições do cotovelo e do ombro. No total, cada pessoa realizou 240 tentativas de gesto, gerando centenas de arquivos que capturam como os sinais musculares mudam com postura e esforço. Ao focar apenas em pessoas com amputações e padronizar a colocação dos eletrodos, a equipe criou um conjunto de dados realista, publicamente disponível e especificamente desenhado para pesquisa em controle de próteses.
Ensinando algoritmos a ler o corpo
Com esse conjunto de dados em mãos, a equipe testou quatro tipos de algoritmos de aprendizado de máquina: redes neurais, florestas aleatórias, árvores de gradient boosting e árvores de decisão. Eles dividiram cada sinal muscular em janelas de tempo curtas e sobrepostas, imitando como uma mão protética real ouviria continuamente o corpo. De cada janela extraíram um pequeno conjunto de características numéricas que capturam intensidade, variação e complexidade do sinal em todos os seis canais. Para evitar redundância e reduzir a carga computacional, usaram um método baseado em distância para selecionar as cinco características mais informativas. Em vez de pedir a um único algoritmo que reconhecesse vários movimentos ao mesmo tempo, construíram um modelo empilhado em duas etapas. A primeira etapa decide se a pessoa está em repouso ou em movimento; a segunda etapa, chamada somente quando se detecta movimento, decide se a ação é flexão ou extensão do punho. 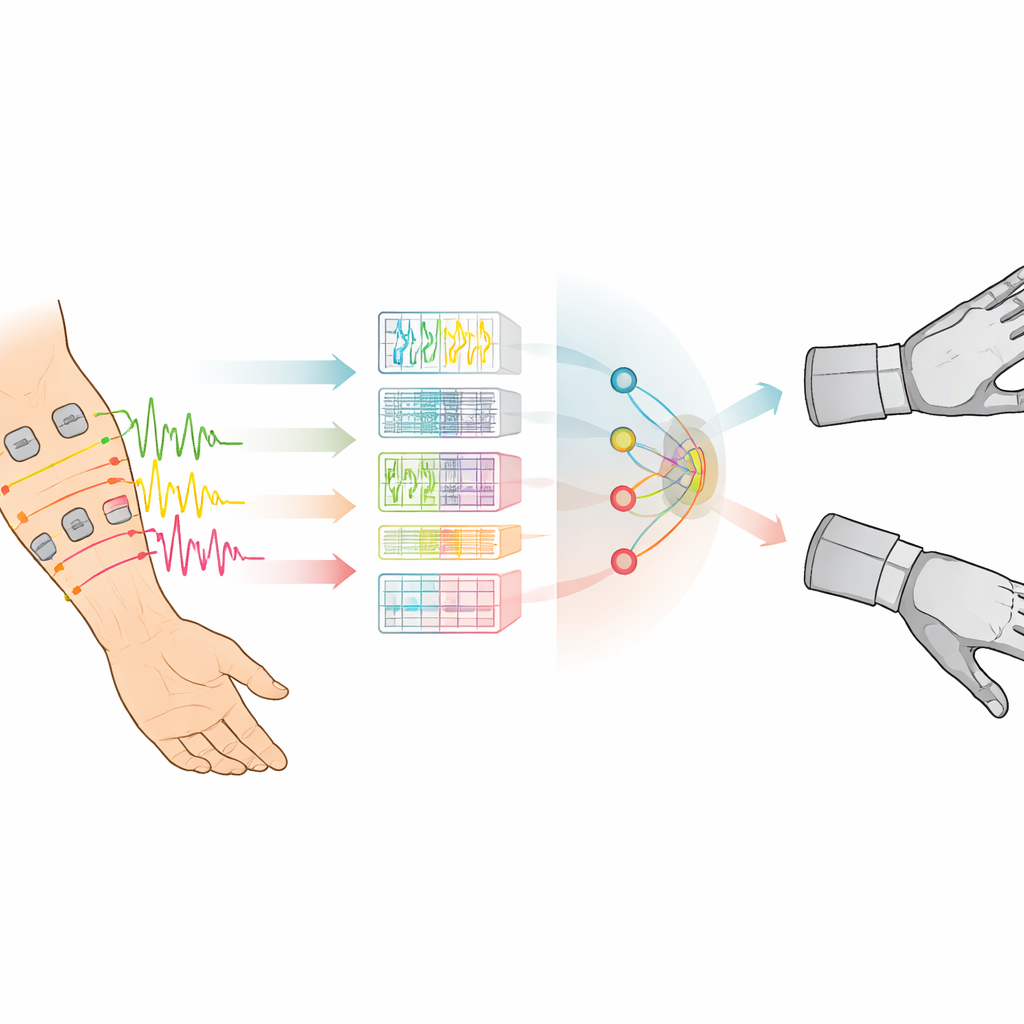
Quão bem o sistema performou
Os modelos empilhados construídos a partir da família de árvores de decisão, especialmente florestas aleatórias e gradient boosting, foram os que melhor performaram. Usando apenas cinco características-chave e janelas de tempo ligeiramente mais longas, a abordagem combinada alcançou acurácias médias acima de 97% ao distinguir repouso, flexão e extensão para usuários individuais. Redes neurais, em contraste, foram menos estáveis e mais sensíveis a diferenças entre pessoas. O estudo também examinou quais características dos usuários influenciaram o desempenho. Pessoas com diferenças congênitas de membro e aquelas com amputações mais distais (mais afastadas do cotovelo) tendiam a alcançar maior acurácia, provavelmente porque seus músculos residuais são mais saudáveis e melhor definidos. Participantes que viviam com a perda do membro por um período intermediário também mostraram resultados particularmente bons, sugerindo que a adaptação muscular e hábitos de movimento a longo prazo influenciam.
Do laboratório para um dispositivo de baixo custo
Para verificar se esses algoritmos poderiam rodar em hardware acessível, a equipe os implementou em um computador compacto Raspberry Pi Zero 2 W, uma plataforma pequena o suficiente para caber dentro de uma mão protética. Modelos que usavam janelas de tempo mais curtas e métodos baseados em árvores conseguiram classificar movimentos do punho em quase tempo real, embora algumas configurações maiores tenham excedido os limites do dispositivo e exijam otimização adicional. Testes iniciais com um participante mostraram que modelos empilhados usando gradient boosting puderam identificar com precisão os movimentos pretendidos em várias posições do braço, enquanto uma votação majoritária sobre previsões recentes ajudou a suavizar leituras errôneas breves.
O que isso significa para futuras mãos artificiais
Em termos simples, este estudo mostra que uma combinação inteligente, porém relativamente simples, de algoritmos pode interpretar de forma confiável sinais musculares de usuários reais de próteses e pode ser executada em eletrônica barata. Ao fundamentar o trabalho em um conjunto de dados dedicado a pessoas com amputações e ajustar cuidadosamente os modelos para cada indivíduo, os autores delineiam um caminho rumo a mãos protéticas personalizadas e de baixo custo que respondam naturalmente às intenções do usuário. Os próximos passos serão incorporar esse sistema em dispositivos físicos e testá-lo em atividades cotidianas, aproximando-se de mãos artificiais que não sejam apenas tecnologicamente avançadas, mas também amplamente acessíveis e mais fáceis de conviver.
Citação: Garcia, J.G., Luque, E.F., Romero, E. et al. Assessment of artificial intelligence-based control algorithms to be implemented in an affordable transradial myoelectric prosthesis. Sci Rep 16, 14382 (2026). https://doi.org/10.1038/s41598-026-43000-1
Palavras-chave: prótese mioelétrica, eletromiografia de superfície, aprendizado de máquina, amputação de membro superior, controle de prótese