Clear Sky Science · tr
Uygun maliyetli bir transradial miyoelektrik proteze uygulanacak yapay zeka tabanlı kontrol algoritmalarının değerlendirilmesi
Yapay Elleri Daha Erişilebilir Kılmanın Yeni Yolları
Özellikle düşük ve orta gelirli ülkelerdeki önkol ampütasyonu yaşayan milyonlarca insan için gelişmiş yapay eller maliyet ve teknik karmaşıklık nedeniyle erişilemez durumda kalıyor. Bu çalışma, kaslardan gelen çok zayıf elektriksel sinyalleri basit el hareketlerine dönüştürebilecek akıllı bilgisayar programlarını inceliyor; amaç, hem güvenilir hem de her kullanıcıya özel uygun maliyetli bir protez el geliştirmek. 
Kas Sinyallerinin Önemi
El hareket ettiğinde kaslarımız cilt yüzeyinde algılanabilen zayıf elektrik sinyalleri üretir. Yüzey elektromiyografi olarak bilinen bu sinyaller, el olmasa bile bir kişinin hangi hareketi yapmaya çalıştığını açığa çıkarabilir. Birçok modern protez el bu sinyallere dayanıyor, ama gerçek dünyada bu sinyaller dağınık ve kararsızdır. Sensör pedleri kayabilir, kaslar zayıf ya da skarlı olabilir ve kolun konumu sinyalleri değiştirir. Amputasyonu olmayan kişilerde iyi çalışan sistemler, fonksiyonel kas sayısı daha az ve anatomi daha değişken olan gerçek protez kullanıcılarında sıklıkla başarısız oluyor. Bu fark, ihtiyaç duyan insanlar için doğru, konforlu ve uygun maliyetli protez kontrol sistemleri tasarlamayı zorlaştırdı.
Gerçek Dünya Veri Temeli Oluşturmak
Bu sorunu ele almak için araştırmacılar, travma veya doğuştan nedenlerle önkol düzeyinde uzuv kaybı olan Peru’dan 20 yetişkinden yeni bir veri seti topladı. Her katılımcı, artık koldaki ana fleksör ve ekstansör kas grupları üzerinde yayılmış altı algılama noktasına sahip iki küçük kablosuz sensör birimi taktı. Katılımcılar otururken ve ayakta, farklı dirsek ve omuz pozisyonlarıyla bilek bükme, bilek uzatma ve başparmak ile orta parmak arasındaki sıkma olmak üzere üç basit bilek hareketini denedi. Her kişi toplamda 240 hareket girişimi gerçekleştirdi ve duruş ve çaba ile kas sinyallerinin nasıl değiştiğini yakalayan yüzlerce dosya üretildi. Amputasyon geçirmiş kişiler üzerinde odaklanarak ve elektrot yerleşimini standartlaştırarak ekip, protez kontrol araştırmaları için özel olarak tasarlanmış gerçekçi ve herkese açık bir veri seti oluşturdu.
Algoritmalara Vücudu Okumayı Öğretmek
Bu veri setiyle ekip, dört tür makine öğrenmesi algoritmasını test etti: sinir ağları, rastgele ormanlar, gradyan artırımlı ağaçlar ve karar ağaçları. Her kas sinyalini gerçek bir protez elin sürekli olarak bedeni dinlemesini taklit eden kısa, üst üste binen zaman pencerelerine böldüler. Her pencereden, tüm altı kanalda sinyal gücünü, değişimini ve karmaşıklığını yakalayan küçük bir sayısal özellik seti çıkardılar. Gereksizliği önlemek ve hesaplama yükünü azaltmak için beş en bilgilendirici özelliği seçmek üzere mesafeye dayalı bir yöntem kullandılar. Bir algoritmadan aynı anda birkaç hareketi tanıması istenmek yerine iki aşamalı "yığınlanmış" bir model kurdular. İlk aşama kişinin dinlenip dinlenmediğine karar veriyor; hareket algılandığında çağrılan ikinci aşama ise işlemin bilek fleksiyonu mu yoksa ekstansiyonu mu olduğunu belirliyor. 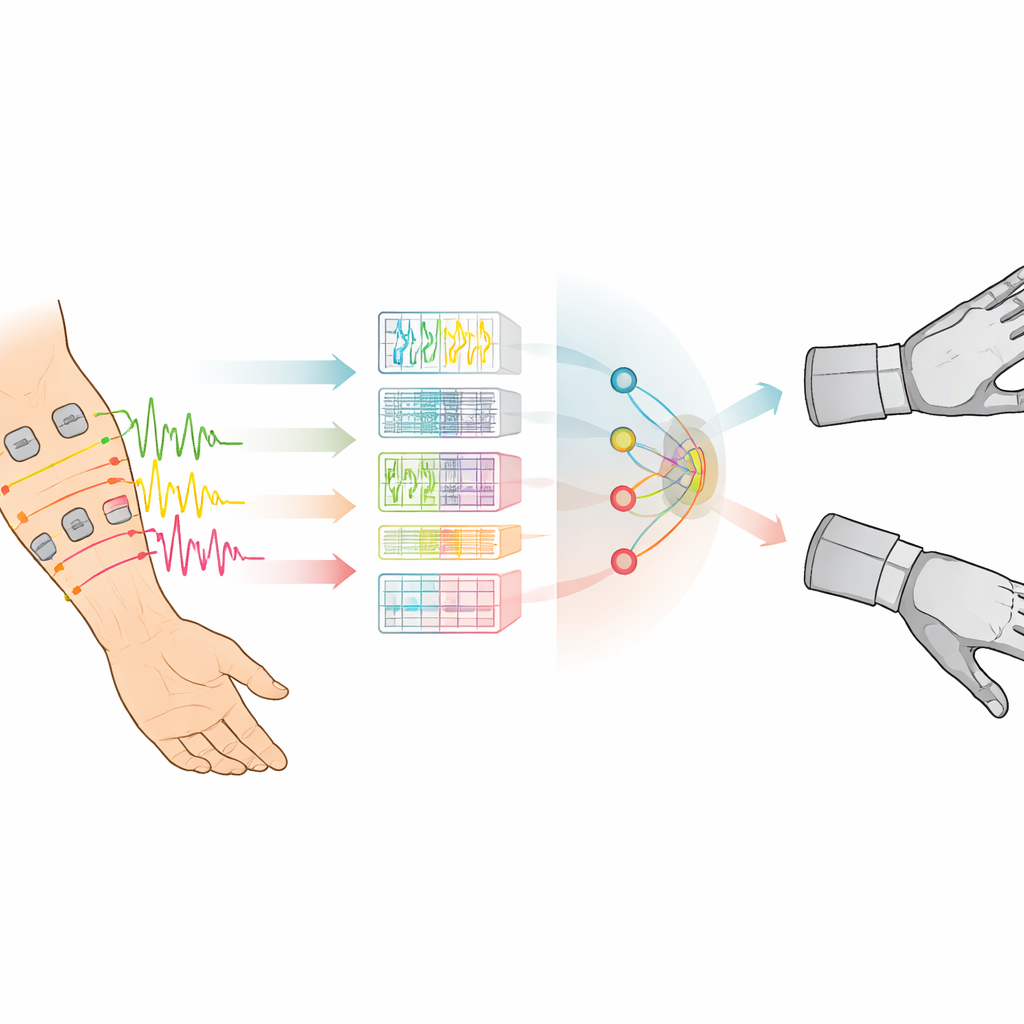
Sistemin Performansı Nasıl Oldu
Karar ağacı ailelerinden oluşturulan yığınlanmış modeller, özellikle rastgele ormanlar ve gradyan artırımlı modeller en iyi performansı gösterdi. Sadece beş ana özellik ve biraz daha uzun zaman pencereleri kullanıldığında, birleşik yaklaşım bireysel kullanıcılar için dinlenme, fleksiyon ve ekstansiyonu ayırt etmede ortalama doğrulukları %97’nin üzerinde elde etti. Buna karşılık, sinir ağları daha az kararlıydı ve kişiler arasındaki farklılıklara daha duyarlıydı. Çalışma ayrıca hangi kullanıcı özelliklerinin performansı etkilediğini inceledi. Doğuştan uzuv farkı olanlar ve dirseğe daha uzak (distal) amputasyonu olanlar genellikle daha yüksek doğruluk elde etti; bunun nedeni artık kollarındaki kasların daha sağlıklı ve daha iyi tanımlanmış olması olabilir. Uzuv kaybıyla orta uzunlukta yaşamış olan katılımcılar da özellikle güçlü sonuçlar gösterdi; bu da kasların ve hareket alışkanlıklarının uzun süreli uyumunun önemli olduğunu düşündürüyor.
Laboratuvardan Düşük Maliyetli Bir Cihaza
Bu algoritmaların uygun maliyetli donanımda çalışıp çalışmayacağını görmek için ekip, modelleri protez elin içine sığabilecek kadar küçük bir platform olan Raspberry Pi Zero 2 W bilgisayarına dağıttı. Daha kısa zaman pencereleri ve ağaç tabanlı yöntemler kullanan modeller neredeyse gerçek zamanlı olarak bilek hareketlerini sınıflandırabildi; ancak bazı daha büyük yapılandırmalar cihazın sınırlarını aştı ve daha fazla optimizasyon gerektirecek. Bir katılımcıyla yapılan ilk testler, gradyan artırımlı yığınlanmış modellerin çeşitli kol pozisyonlarında istenen hareketleri doğru şekilde tanıyabildiğini ve son tahminler üzerinde çoğunluk oylaması yapmanın kısa süreli yanlış okumaları yumuşattığını gösterdi.
Geleceğin Yapay Eller İçin Anlamı
Sade bir ifadeyle, bu çalışma akıllı ama nispeten basit bir algoritma bileşiminin gerçek protez kullanıcılarından gelen kas sinyallerini güvenilir şekilde yorumlayabileceğini ve ucuz elektroniklerde çalıştırılabileceğini gösteriyor. Çalışmalarını amputasyon geçirmiş kişilerden elde edilen özel bir veri setiyle temellendirerek ve modelleri her birey için dikkatle ayarlayarak yazarlar, kullanıcının niyetine doğal şekilde yanıt veren düşük maliyetli, kişiselleştirilmiş protez ellere giden bir yol öne koyuyor. Bir sonraki adımlar, bu sistemi fiziksel cihazlara gömmek ve günlük etkinlikler sırasında test etmek olacak; böylece teknik olarak gelişmiş olmanın ötesinde, yaygın erişilebilir ve yaşamı daha kolay hale getiren yapay ellere doğru ilerlenecek.
Atıf: Garcia, J.G., Luque, E.F., Romero, E. et al. Assessment of artificial intelligence-based control algorithms to be implemented in an affordable transradial myoelectric prosthesis. Sci Rep 16, 14382 (2026). https://doi.org/10.1038/s41598-026-43000-1
Anahtar kelimeler: miyoelektrik protez, yüzey elektromiyografi, makine öğrenmesi, üst ekstremite ampütasyonu, protez kontrolü