Clear Sky Science · he
הערכת אלגוריתמים מבוססי בינה מלאכותית לשליטה להטמעה בפרוטזת אמה-תרדיאלית ברת-מחיר
דרכים חדשות להפוך כפות יד מלאכותיות לנגישות יותר
עבור מיליוני אנשים החיים עם כריתות אמה, ובמיוחד באזורים בעלי הכנסה נמוכה ובינונית, כפות יד מלאכותיות מתקדמות נותרות מחוץ להישג יד בגלל עלות ומורכבות טכנית. המחקר בוחן כיצד תוכנות חכמות יכולות לתרגם אותות חשמליים חלשים מהשרירים לתנועות יד פשוטות, במטרה לבנות כף פרוטזה ברת-מחיר שיהיה גם אמין וגם מותאם אישית לכל משתמש. 
מדוע אותות השרירים חשובים
בכל פעם שאנו מזיזים את ידינו, השרירים מייצרים אותות חשמליים חלשים שניתן לקלוט על פני העור. אותות אלה, המכונים אלקטרומיוגרפיה משטחית, יכולים לחשוף איזו תנועה אדם מנסה לבצע, גם אם היד חסרה. פרוטזות מודרניות רבות מסתמכות על אותות אלה, אבל במציאות הם רעשיים ולא יציבים. רטיות החיישנים עלולות לזוז, השרירים עלולים להיות חלשים או צלקתיים, ושינויי מיקום הזרוע משפיעים על האותות. מערכות שעובדות היטב על אנשים ללא כריתות נכשלות לעתים קרובות בשימוש על ידי משתמשי פרוטזות אמיתיים, אשר עלולים להיות עם פחות שרירים פונקציונליים ואנטומיה מגוונת יותר. הפער הזה הקשה על עיצוב מערכות בקרת פרוטזה מדויקות, נוחות ובעלות-זולה עבור מי שזקוק להן ביותר.
בניית בסיס נתונים מהעולם האמיתי
כדי להתמודד עם הבעיה, החוקרים אספו מערך נתונים חדש מ-20 מבוגרים בפרו שנפלו להם איברי אמה ברמת האמה כתוצאה מטראומה או ממצבים מולדים. כל משתתף לבש שתי יחידות חישה אלחוטיות קטנות על שארית האמה, עם שישה נקודות חישה הפרוסות על פני קבוצות השרירים הגמישות והפושרות העיקריות. המשתתפים ניסו שלוש תנועות פשוטות הקשורות לפרק כף היד — כיפוף פרק כף היד, פשיטה ותפיסה בין האגודל לאצבע האמצעית — בזמן ישיבה ובעמידה, ובמיקומי מרפק וכתף שונים. בסך הכל ביצע כל אדם 240 ניסיונות תנועה, מה שיצר מאות קבצים המתעדים כיצד אותות השרירים משתנים עם יציבה ומאמץ. בכך שהתמקדו אך ורק באנשים עם כריתות ותקננו את מיקום האלקטרודות, הצוות יצר מערך נתונים מציאותי וזמין לציבור שנועד ספציפית למחקר בקרת פרוטזות.
לימוד האלגוריתמים לקרוא את הגוף
עם מערך הנתונים הזה, הצוות בדק ארבעה סוגי אלגוריתמי למידת מכונה: רשתות עצביות, יערות אקראיים, עצי גרדיאנט בוסטינג, ועצי החלטה. הם חלקו כל אות שריר לחלונות זמן קצרים חופפים, המדמים כיצד כף יד פרוטזה אמיתית תאזין לגוף באופן רציף. מכל חלון חילצו קבוצה קטנה של תכונות מספריות המתארות עוצמת אות, וריאציה ומורכבות על פני שש הערוצים. כדי להימנע מרדונדנטיות ולהפחית עומס חישובי השתמשו בשיטת מרחק לבחירת חמש התכונות המידעיות ביותר. במקום לבקש מאלגוריתם יחיד לזהות מספר תנועות בבת אחת, בנו מודל "מוערם" בשתי שלבים. השלב הראשון מחליט האם האדם במנוחה או בתנועה; השלב השני, המופעל רק כשזוהתה תנועה, קובע האם הפעולה היא כיפוף או פשיטת פרק כף היד. 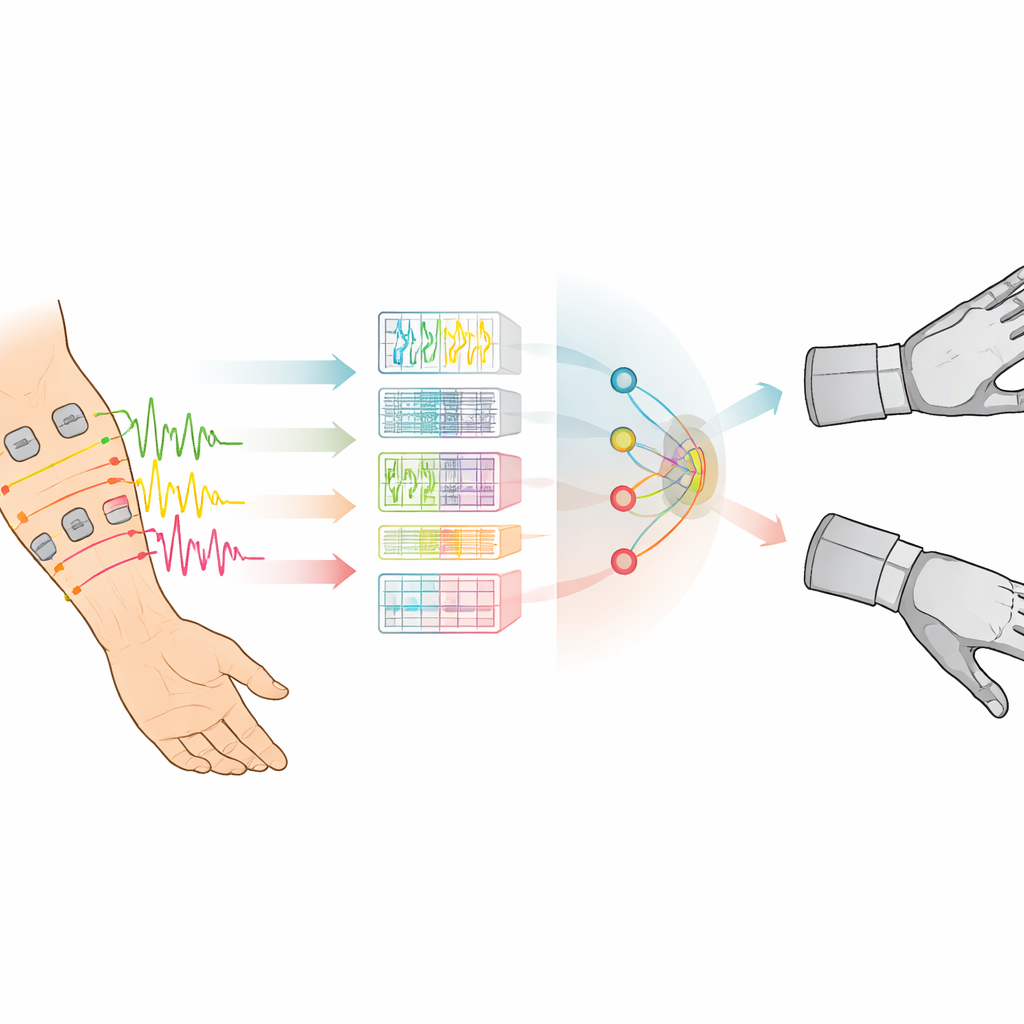
כמה טוב המערכת עבדה
המודלים המוערמים שנבנו ממשפחות עצי ההחלטה, ובמיוחד היערות האקראיים ועצי הגרדיאנט בוסטינג, היו הטובים ביותר. בשימוש בחמש תכונות מפתח בלבד ובחלונות זמן מעט ארוכים יותר, הגישה המשולבת הגיעה לדיוק ממוצע מעל 97% בהבחנה בין מנוחה, כיפוף ופשיטה עבור משתמשים בודדים. לעומת זאת, רשתות עצביות היו פחות יציבות ורגישות יותר לשונות בין אנשים. המחקר בדק גם אילו מאפייני משתמש השפיעו על הביצועים. אנשים עם הבדלים גופניים מולדים וכאלה עם כריתות דיסטליות יותר (רחוקות יותר מהמרפק) נטו להשיג דיוק גבוה יותר, ככל הנראה מכיוון ששרירי השארית שלהם בריאים ומוגדרים יותר. משתתפים שחיו עם אובדן הגפה במשך תקופה בינונית להיסטוריה הראו גם הם תוצאות חזקות, מה שמרמז שהסתגלות שרירים והרגלי תנועה לאורך זמן חשובים.
מהמעבדה למכשיר זול
כדי לבחון האם אלגוריתמים אלה יכולים לפעול על חומרה ברת-מחיר, הצוות הטמיע אותם על מחשב קומפקטי Raspberry Pi Zero 2 W, פלטפורמה קטנה המספיקה להכנסה לתוך כף פרוטזה. מודלים שהשתמשו בחלונות זמן קצרים יותר ובשיטות מבוססות-עצים יכלו לסווג תנועות פרק כף היד בזמן כמעט-אמת, אף על פי שחלק מהקונפיגורציות הגדולות יותר חרגו ממגבלות המכשיר ודורשות אופטימיזציה נוספת. בדיקות ראשוניות עם משתתף אחד הראו שמודלים מוערמים המשתמשים בגרדיאנט בוסטינג יכולים לזהות כוונות תנועה במדויק במגוון מצבי זרוע, בעוד הצבעת רוב על פני תחזיות אחרונות סייעה להחליק קריאות שגויות קצרות.
מה משמעות הדבר עבור כפות יד מלאכותיות עתידיות
במילים פשוטות, המחקר מראה כי שילוב חכם אך יחסי-פשוט של אלגוריתמים יכול לפרש באופן אמין אותות שרירים ממשתמשי פרוטזות אמיתיים וניתן להרצה על אלקטרוניקה זולה. על ידי עיגון העבודה שלהם במערך נתונים ייעודי מאנשים עם כריתות וכיול זהיר של המודלים לכל משתמש, המחברים מציירים מסלול לעבר כפות יד פרוטזיות מותאמות אישית ובעלות-נמוכה המגיבות באופן טבעי לכוונות המשתמש. הצעדים הבאים יהיו להטמיע את המערכת במכשירים פיזיים ולבחון אותה בפעילויות היום-יום, ולהתקרב לכפות יד מלאכותיות שאינן רק מתקדמות טכנולוגית אלא גם נגישות וקלים יותר לשילוב בחיי היומיום.
ציטוט: Garcia, J.G., Luque, E.F., Romero, E. et al. Assessment of artificial intelligence-based control algorithms to be implemented in an affordable transradial myoelectric prosthesis. Sci Rep 16, 14382 (2026). https://doi.org/10.1038/s41598-026-43000-1
מילות מפתח: פרוטזה מיואלקטרית, אלקטרומיוגרפיה משטחית, למידת מכונה, כריתת גפה עליונה, בקרת פרוטזות