Clear Sky Science · ru
Оценка алгоритмов управления на основе искусственного интеллекта для реализации в доступном транстразиальном миоэлектрическом протезе
Новые пути к доступности искусственных рук
Для миллионов людей с ампутацией предплечья, особенно в странах с низким и средним уровнем дохода, современные искусственные руки остаются недоступными из‑за высокой стоимости и технической сложности. В этом исследовании изучается, как умные компьютерные программы могут превращать слабые электрические сигналы мышц в простые движения руки с целью создания доступного протеза, который был бы надёжным и индивидуально настроенным на пользователя. 
Почему сигналы мышц важны
Каждый раз, когда мы двигаем рукой, мышцы создают слабые электрические сигналы, которые можно зарегистрировать по поверхности кожи. Эти сигналы, известные как поверхностная электромиография, могут указывать, какое движение человек пытается выполнить, даже если рука отсутствует. Многие современные протезы опираются на такие сигналы, но в реальных условиях они шуми́стые и нестабильные. Сенсорные подушечки могут смещаться, мышцы могут быть ослаблены или рубцовыми, а положение руки меняет форму сигнала. Системы, хорошо работающие на людях без ампутаций, часто дают сбои при использовании реальными пользователями протезов, у которых меньше функциональных мышц и более разнообразная анатомия. Этот разрыв усложняет разработку управления протезом, которое было бы точным, комфортным и доступным для тех, кто в нём нуждается.
Создание основы данных для реальных условий
Чтобы решить эту проблему, исследователи собрали новый набор данных от 20 взрослых в Перу с потерей конечности на уровне предплечья в результате травмы или врождённого дефекта. Каждый участник носил два маленьких беспроводных сенсорных блока на остатке предплечья, с шестью точками съёма, расположенными над основными сгибателями и разгибателями. Участники выполняли три простых жеста, связанных с запястьем — сгибание, разгибание и щипок большим и средним пальцами — сидя и стоя и с разными положениями локтя и плеча. В сумме каждый человек сделал 240 попыток жестов, что породило сотни файлов, фиксирующих, как мышечные сигналы меняются с положением и усилием. Сосредоточившись исключительно на людях с ампутациями и стандартизировав размещение электродов, команда создала реалистичный общедоступный набор данных, специально предназначенный для исследований управления протезами.
Обучение алгоритмов «читать» тело
Имея этот набор данных, команда протестировала четыре типа алгоритмов машинного обучения: нейронные сети, случайные леса, градиентный бустинг и деревья решений. Они разбили каждый мышечный сигнал на короткие перекрывающиеся временные окна, имитируя, как реальный протез постоянно «слушает» тело. Из каждого окна извлекали небольшой набор числовых признаков, отражающих силу сигнала, изменчивость и сложность по всем шести каналам. Чтобы избежать избыточности и снизить вычислительную нагрузку, использовали метод на основе дистанций для отбора пяти наиболее информативных признаков. Вместо того чтобы просить один алгоритм распознавать несколько движений одновременно, они построили двухступенчатую «слоистую» модель. Первый этап решает, находится ли человек в покое или выполняет движение; второй этап, вызываемый только при обнаружении движения, определяет, является ли действие сгибанием или разгибанием запястья. 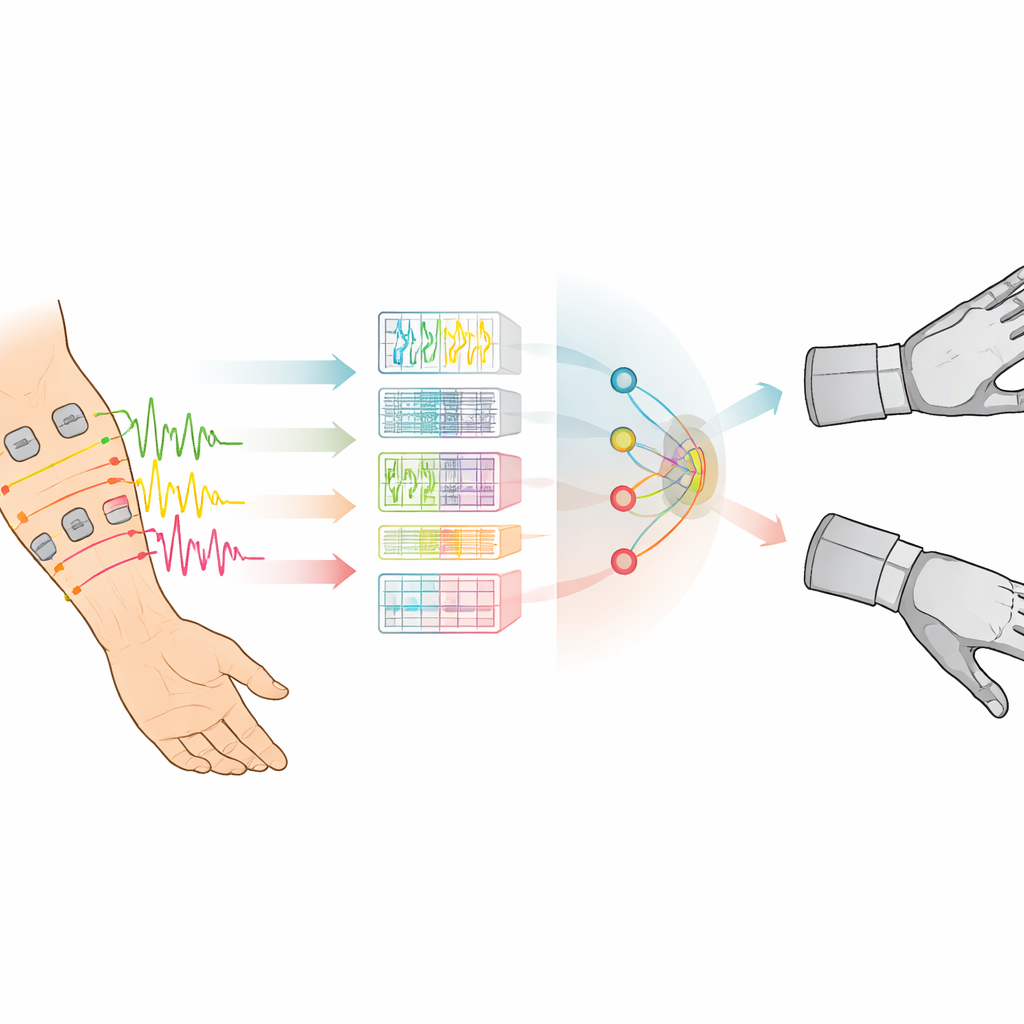
Насколько хорошо работала система
Лучшие результаты показали слоистые модели на основе семейства деревьев решений, в особенности случайные леса и градиентный бустинг. Используя всего пять ключевых признаков и слегка более длинные временные окна, комбинированный подход достиг средних точностей выше 97 % при разграничении покоя, сгибания и разгибания у отдельных пользователей. Нейронные сети, напротив, были менее стабильны и более чувствительны к вариациям между людьми. Исследование также проанализировало, какие характеристики пользователей влияли на результат. Люди с врождёнными деформациями и те, у кого ампутация была более дистальной (дальше от локтя), как правило, достигали более высокой точности, вероятно потому, что их остаточные мышцы более здоровы и лучше очерчены. Участники, прожившие с потерей конечности средний период времени, также показали особенно сильные результаты, что указывает на роль долгосрочной адаптации мышц и двигательных привычек.
От лаборатории к недорогому устройству
Чтобы проверить, могут ли эти алгоритмы работать на доступном железе, команда разместила их на компактном компьютере Raspberry Pi Zero 2 W — платформе достаточно маленькой, чтобы поместиться внутри протеза. Модели, использующие короткие временные окна и методы на основе деревьев, смогли классифицировать движения запястья в почти реальном времени, хотя некоторые более тяжёлые конфигурации превысили возможности устройства и потребуют оптимизации. Первичные тесты с одним участником показали, что слоистые модели с градиентным бустингом точно определяют намерения в разных положениях руки, а голосование большинства по последним предсказаниям помогает сгладить короткие ошибки распознавания.
Что это значит для будущих искусственных рук
Проще говоря, это исследование показывает, что умное, но относительно простое сочетание алгоритмов может надёжно интерпретировать мышечные сигналы реальных пользователей протезов и запускаться на недорогой электронике. Основывая работу на специализированном наборе данных от людей с ампутациями и тщательно настраивая модели под каждого пользователя, авторы очертили путь к недорогим, персонализированным протезам рук, которые естественно реагируют на намерения владельца. Следующие шаги — внедрить эту систему в физические устройства и протестировать её в повседневной жизни, приблизив искусственные руки, которые будут не только технически продвинутыми, но и более доступными и удобными для использования.
Цитирование: Garcia, J.G., Luque, E.F., Romero, E. et al. Assessment of artificial intelligence-based control algorithms to be implemented in an affordable transradial myoelectric prosthesis. Sci Rep 16, 14382 (2026). https://doi.org/10.1038/s41598-026-43000-1
Ключевые слова: миоэлектрический протез, поверхностная электромиография, машинное обучение, ампутация верхней конечности, управление протезом