Clear Sky Science · it
Valutazione di algoritmi di controllo basati sull’intelligenza artificiale da implementare in una protesi mioelettrica transradiale a basso costo
Nuove vie per rendere più accessibili le mani artificiali
Per milioni di persone con amputazioni dell’avambraccio, soprattutto nei paesi a basso e medio reddito, le mani artificiali avanzate restano fuori portata a causa dei costi e della complessità tecnica. Questo studio esplora come programmi informatici intelligenti possano tradurre deboli segnali elettrici muscolari in semplici movimenti della mano, con l’obiettivo di costruire una mano protesica economica, affidabile e personalizzata per ciascun utente. 
Perché i segnali muscolari sono importanti
Ogni volta che muoviamo le mani, i muscoli producono deboli segnali elettrici rilevabili sulla superficie della pelle. Questi segnali, noti come elettromiografia di superficie, possono indicare quale movimento una persona sta cercando di compiere, anche se la mano è assente. Molte mani protesiche moderne si basano su questi segnali, ma nella pratica sono disordinati e instabili. I sensori possono spostarsi, i muscoli possono essere deboli o cicatriziali e la posizione del braccio modifica i segnali. I sistemi che funzionano bene su persone senza amputazioni spesso falliscono quando usati da veri portatori di protesi, che possono avere meno muscoli funzionali e un’anatomia più variabile. Questo divario ha reso difficile progettare sistemi di controllo protesico precisi, confortevoli e accessibili per chi ne ha più bisogno.
Costruire una base dati reale
Per affrontare il problema, i ricercatori hanno raccolto un nuovo set di dati da 20 adulti in Perù con perdita di arto a livello dell’avambraccio dovuta a traumi o condizioni congenite. Ciascuna persona ha indossato due piccoli moduli sensoriali wireless sul moncone dell’avambraccio, con sei punti di rilevamento distribuiti sui principali gruppi muscolari flessori ed estensori. I partecipanti hanno provato tre semplici gesti del polso—flessione, estensione e pinza tra pollice e medio—mentre erano seduti e in piedi e con diverse posizioni di gomito e spalla. In totale, ogni persona ha eseguito 240 tentativi di gesto, generando centinaia di file che catturano come i segnali muscolari cambiano con postura e sforzo. Focalizzandosi esclusivamente su persone con amputazioni e standardizzando il posizionamento degli elettrodi, il team ha creato un dataset realistico e pubblicamente disponibile appositamente pensato per la ricerca sul controllo protesico.
Insegnare agli algoritmi a leggere il corpo
Con questo dataset a disposizione, il team ha testato quattro tipi di algoritmi di apprendimento automatico: reti neurali, foreste casuali (random forest), gradient boosting e alberi decisionali. Hanno suddiviso ogni segnale muscolare in brevi finestre temporali sovrapposte, imitando come una mano protesica reale ascolterebbe continuamente il corpo. Da ogni finestra hanno estratto un piccolo insieme di caratteristiche numeriche che catturano l’intensità, la variazione e la complessità del segnale su tutti e sei i canali. Per evitare ridondanze e ridurre il carico computazionale, hanno usato un metodo basato sulla distanza per selezionare le cinque caratteristiche più informative. Invece di chiedere a un unico algoritmo di riconoscere più movimenti contemporaneamente, hanno costruito un modello “impilato” in due fasi. Il primo passo decide se la persona è a riposo o in movimento; il secondo passo, chiamato solo quando viene rilevato movimento, decide se l’azione è flessione o estensione del polso. 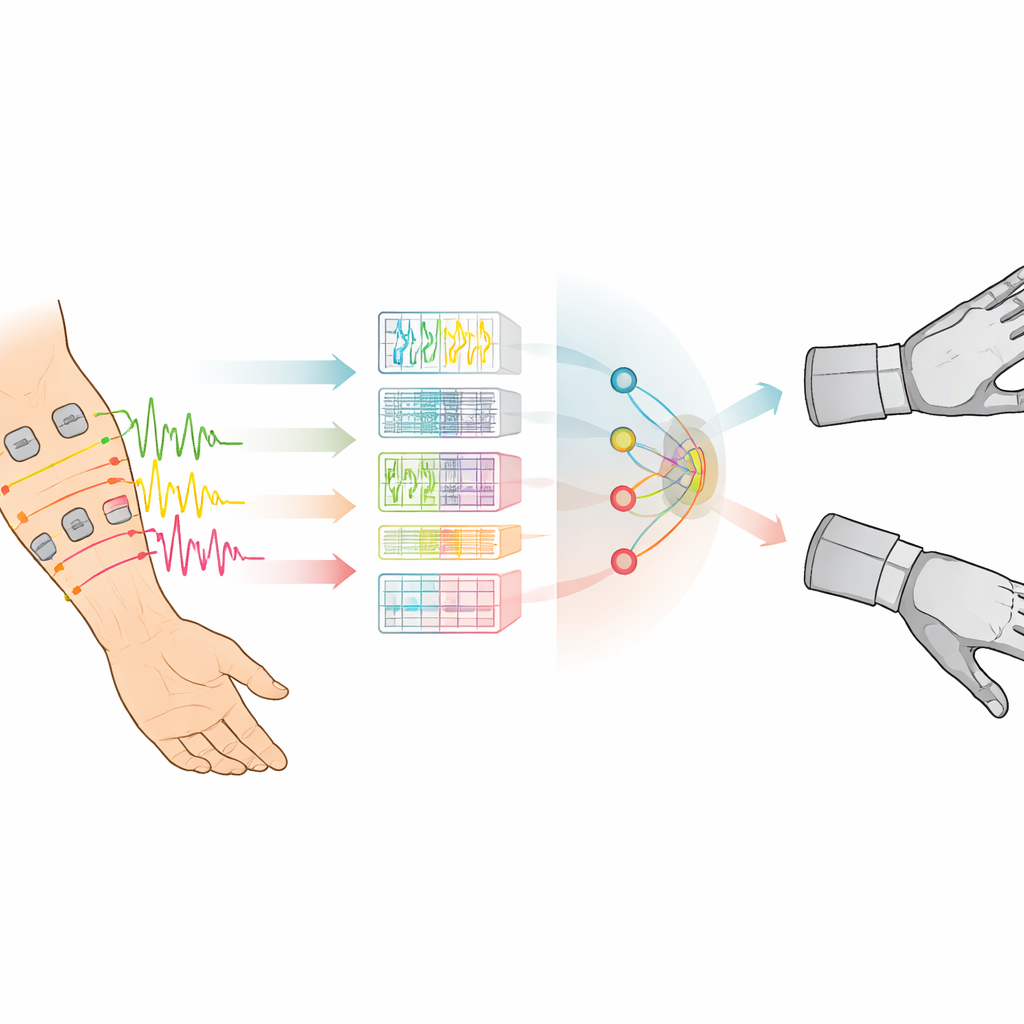
Quanto bene ha funzionato il sistema
I modelli impilati basati su famiglie di alberi decisionali, in particolare le foreste casuali e il gradient boosting, hanno dato le migliori prestazioni. Utilizzando solo cinque caratteristiche chiave e finestre temporali leggermente più lunghe, l’approccio combinato ha raggiunto accuratezze medie superiori al 97% nel distinguere riposo, flessione ed estensione per singoli utenti. Le reti neurali, invece, si sono dimostrate meno stabili e più sensibili alle differenze tra le persone. Lo studio ha anche esaminato quali caratteristiche degli utenti influenzassero le prestazioni. Le persone con differenze congenite degli arti e quelle con amputazioni più distali (più lontane dal gomito) tendevano a ottenere maggiore accuratezza, probabilmente perché i loro muscoli residui sono più sani e meglio definiti. I partecipanti che convivevano con la perdita dell’arto da un periodo intermedio hanno mostrato risultati particolarmente solidi, suggerendo che l’adattamento muscolare e delle abitudini di movimento nel tempo ha un ruolo.
Dal laboratorio a un dispositivo a basso costo
Per verificare se questi algoritmi potessero girare su hardware economico, il team li ha eseguiti su un compatto computer Raspberry Pi Zero 2 W, una piattaforma abbastanza piccola da poter essere alloggiata dentro una mano protesica. I modelli che usavano finestre temporali più brevi e metodi basati su alberi sono riusciti a classificare i movimenti del polso in tempo quasi reale, sebbene alcune configurazioni più grandi abbiano superato i limiti del dispositivo e richiederanno ulteriori ottimizzazioni. I test iniziali con un partecipante hanno mostrato che i modelli impilati con gradient boosting riuscivano a identificare con precisione i movimenti intenzionati in diverse posizioni del braccio, mentre una votazione di maggioranza sulle predizioni recenti aiutava a smussare letture errate di breve durata.
Che cosa significa per le mani artificiali del futuro
In termini semplici, questo studio dimostra che una combinazione di algoritmi intelligente ma relativamente semplice può interpretare in modo affidabile i segnali muscolari di veri portatori di protesi e può essere eseguita su componenti elettronici a basso costo. Basando il lavoro su un dataset dedicato a persone con amputazioni e ottimizzando i modelli per ogni individuo, gli autori tracciano una strada verso mani protesiche personalizzate, economiche e reattive alle intenzioni dell’utente. I prossimi passi saranno integrare questo sistema in dispositivi fisici e testarlo nelle attività quotidiane, avvicinandosi a mani artificiali non solo tecnicamente avanzate ma anche ampiamente accessibili e più facili da utilizzare nella vita reale.
Citazione: Garcia, J.G., Luque, E.F., Romero, E. et al. Assessment of artificial intelligence-based control algorithms to be implemented in an affordable transradial myoelectric prosthesis. Sci Rep 16, 14382 (2026). https://doi.org/10.1038/s41598-026-43000-1
Parole chiave: protesi mioelettrica, elettromiografia di superficie, apprendimento automatico, amputazione dell’arto superiore, controllo protesico