Clear Sky Science · ar
تقييم خوارزميات التحكم المعتمدة على الذكاء الاصطناعي لتطبيقها في طرف صناعي ميوإلكتريك تحت الساعد ميسور التكلفة
طرق جديدة لجعل الأيدي الاصطناعية أكثر سهولة
بالنسبة للملايين من الأشخاص الذين يعيشون مع بتر الساعد، لا سيما في البلدان ذات الدخل المنخفض والمتوسط، تظل الأيادي الاصطناعية المتقدمة بعيدة المنال بسبب التكلفة والتعقيد التقني. تستعرض هذه الدراسة كيف يمكن لبرامج حاسوبية ذكية أن تترجم الإشارات الكهربائية الطفيفة من العضلات إلى حركات يد بسيطة، بهدف بناء يد اصطناعية ميسورة التكلفة تجمع بين الموثوقية والتخصيص لكل مستخدم. 
لماذا تهم إشارات العضلات
عندما نحرك أيدينا، تولد عضلاتنا إشارات كهربائية ضعيفة يمكن التقاطها على سطح الجلد. تُعرف هذه الإشارات بتخطيط كهربية العضلات السطحي، ويمكن أن تكشف عن الحركة التي يحاول الشخص تنفيذها حتى لو كانت اليد مفقودة. تعتمد العديد من الأيادي الاصطناعية الحديثة على هذه الإشارات، لكنها في الواقع تكون فوضوية وغير مستقرة. قد تتحرك وسادات المستشعر، أو تكون العضلات ضعيفة أو متندبة، كما أن وضعية الذراع تُغيّر الإشارات. الأنظمة التي تعمل جيدًا لدى الأشخاص غير المبتورين غالبًا ما تفشل عند استخدامها من قبل مستخدمي الأطراف الصناعية الفعليين، الذين قد يمتلكون عضلات وظيفية أقل وتشري anatomy أكثر تنوعًا. أحدثت هذه الفجوة صعوبة في تصميم أنظمة تحكم طرفي دقيقة ومريحة وميسورة التكلفة للأشخاص المحتاجين إليها.
بناء قاعدة بيانات واقعية
لمواجهة هذه المشكلة، جمع الباحثون مجموعة بيانات جديدة من 20 بالغًا في بيرو يعانون من فقدان طرف على مستوى الساعد ناجم عن صدمة أو حالات خلقية. ارتدى كل مشارك وحدتين لاسلكيتين صغيرتين على ساعدهم المتبقي، مع ست نقاط استشعار موزعة على مجموعات العضلات الرئيسية المثنية والمبسطة. حاول المشاركون ثلاث حركات بسيطة متعلقة بالمعصم—ثني المعصم، ومدّه، والقرص بالإبهام والسبابة—أثناء الجلوس والوقوف، وبوضعيات مختلفة للمرفق والكتف. أجرى كل شخص في المجموع 240 محاولة للحركة، مولّدًا مئات الملفات التي تلتقط كيف تتغير إشارات العضلات مع الوضعية والجهد. من خلال التركيز فقط على الأشخاص المبتورين وتوحيد وضع الأقطاب، أنشأ الفريق مجموعة بيانات واقعية ومتاحة علنًا صُممت خصيصًا لأبحاث تحكم الأطراف الصناعية.
تعليم الخوارزميات قراءة الجسد
بوجود هذه المجموعة من البيانات، اختبر الفريق أربعة أنواع من خوارزميات تعلم الآلة: الشبكات العصبية، الغابات العشوائية، أشجار التعزيز gradient boosting، وأشجار القرار. قطعوا كل إشارة عضلية إلى نوافذ زمنية قصيرة متداخلة، محاكيين كيف ستستمع اليد الاصطناعية للجسم بشكل مستمر. من كل نافذة استخرجوا مجموعة صغيرة من الميزات الرقمية التي تلتقط قوة الإشارة وتباينها وتعقيدها عبر القنوات الست. لتجنب التكرار وتقليل العبء الحاسوبي، استخدموا طريقة قائمة على المسافة لاختيار خمس ميزات أكثر إفادة. بدلًا من مطالبة خوارزمية واحدة بالتعرف على عدة حركات دفعة واحدة، بنوا نموذجًا مكوَّنًا من خطوتين «مكدستين». تحدد الخطوة الأولى ما إذا كان الشخص في حالة راحة أم يتحرك؛ أما الخطوة الثانية، فتُستدعى فقط عند اكتشاف حركة وتقرر ما إذا كان الفعل هو ثني المعصم أم مدّه. 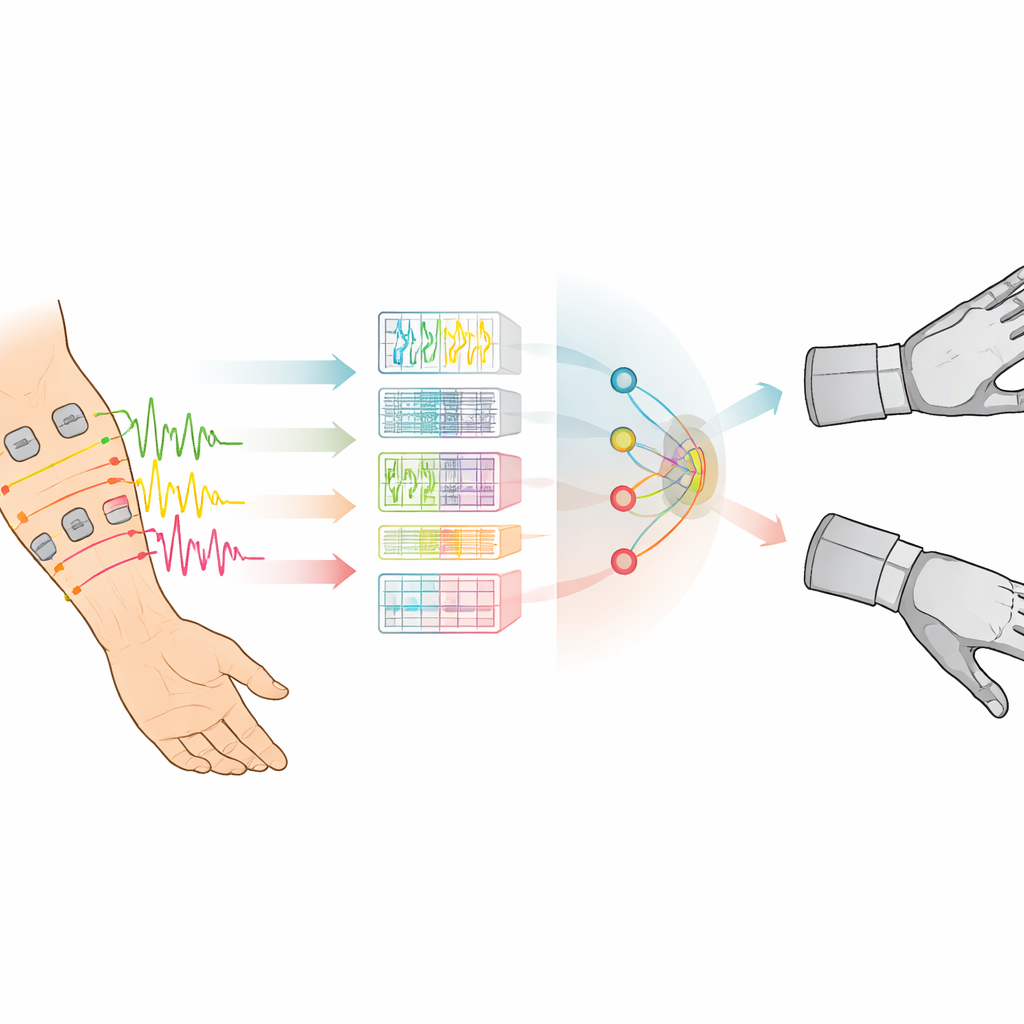
مدى أداء النظام
أدت النماذج المكدسة المبنية على عائلات أشجار القرار، وخصوصًا الغابات العشوائية وأشجار التعزيز، أداءً أفضل. باستخدام خمس ميزات رئيسية فقط ونوافذ زمنية أطول قليلاً، وصل النهج المجمع إلى دقة متوسطة تتجاوز 97% في تمييز الراحة والثني والمدّ للمستخدمين الأفراد. بالمقابل، كانت الشبكات العصبية أقل استقرارًا وأكثر حساسية للاختلافات بين الأشخاص. كما بحثت الدراسة في خصائص المستخدم التي أثرت في الأداء. حقق الأشخاص ذوو الاختلافات الطفيلية الخلقية وأولئك ذوو البتر الأكثر بعدًا عن الكوع دقة أعلى عمومًا، على الأرجح لأن عضلاتهم المتبقية أكثر صحة وتحديدًا. كما أظهر المشاركون الذين عاشوا مع البتر مدة متوسطة نتائج قوية بشكل خاص، مما يشير إلى أن التكيف طويل الأمد للعضلات وعادات الحركة له أثر.
من المختبر إلى جهاز منخفض التكلفة
لاختبار ما إذا كانت هذه الخوارزميات قابلة للتشغيل على أجهزة ميسورة، نشر الفريق النماذج على حاسوب Raspberry Pi Zero 2 W صغير، وهو منصة صغيرة بما يكفي لتوضع داخل يد صناعية. استطاعت النماذج التي استخدمت نوافذ زمنية أقصر وأساليب قائمة على الأشجار تصنيف حركات المعصم تقريبًا في الزمن الحقيقي، رغم أن بعض التكوينات الأكبر فاقت حدود الجهاز وستتطلب تحسينًا إضافيًا. أظهرت الاختبارات الأولية مع مشارك واحد أن النماذج المكدسة باستخدام أشجار التعزيز استطاعت تحديد الحركات المقصودة بدقة عبر أوضاع ذراع متنوعة، بينما ساعد التصويت بالأغلبية على التنبؤات الأخيرة في تنعيم الأخطاء القصيرة الأمد.
ما الذي يعنيه هذا للأيادي الاصطناعية المستقبلية
بعبارات بسيطة، تُظهر هذه الدراسة أن مجموعة ذكية لكن بسيطة نسبيًا من الخوارزميات قادرة على تفسير إشارات العضلات من مستخدمي الأطراف الصناعية الفعليين بشكل موثوق ويمكن تشغيلها على إلكترونيات رخيصة. من خلال تأسيس العمل على مجموعة بيانات مخصصة للأشخاص المبتورين وضبط النماذج بعناية لكل فرد، يحدد المؤلفون مسارًا نحو أيدي اصطناعية مخصصة منخفضة التكلفة تستجيب بشكل طبيعي لنيات المستخدم. ستكون الخطوات التالية دمج هذا النظام في أجهزة فعلية واختباره أثناء الأنشطة اليومية، للتقدم نحو أيادي اصطناعية ليست متقدمة تقنيًا فحسب، بل متاحة على نطاق واسع وأسهل للمعيشة معها.
الاستشهاد: Garcia, J.G., Luque, E.F., Romero, E. et al. Assessment of artificial intelligence-based control algorithms to be implemented in an affordable transradial myoelectric prosthesis. Sci Rep 16, 14382 (2026). https://doi.org/10.1038/s41598-026-43000-1
الكلمات المفتاحية: طرف صناعي ميوإلكتريك, تخطيط كهربية العضلات السطحي, تعلم الآلة, بتر الطرف العلوي, تحكم طرفي صناعي