Clear Sky Science · nl
Beoordeling van op kunstmatige intelligentie gebaseerde regelalgoritmen voor implementatie in een betaalbare transradiale myo-elektrische prothese
Nieuwe wegen om kunsthanden toegankelijker te maken
Voor miljoenen mensen met onderarmamputaties, met name in lage- en middeninkomenslanden, blijven geavanceerde kunsthanden onbereikbaar door kosten en technische complexiteit. Deze studie onderzoekt hoe slimme computerprogramma’s kleine elektrische signalen uit spieren kunnen omzetten in eenvoudige handbewegingen, met als doel een betaalbare prothetische hand te bouwen die zowel betrouwbaar is als op de gebruiker is afgestemd. 
Waarom spiersignalen ertoe doen
Telkens wanneer we onze handen bewegen, produceren onze spieren zwakke elektrische signalen die aan het huidoppervlak kunnen worden gemeten. Deze signalen, bekend als oppervlakte-elektromyografie, kunnen onthullen welke beweging iemand probeert te maken, zelfs als de hand ontbreekt. Veel moderne prothetische handen vertrouwen op deze signalen, maar in de praktijk zijn ze rommelig en instabiel. Sensorpads kunnen verschuiven, spieren kunnen zwak of littekenachtig zijn, en de armpositie verandert de signalen. Systemen die goed werken bij mensen zonder amputaties falen vaak bij daadwerkelijke prothesegebruikers, die mogelijk minder functionele spieren en een variabelere anatomie hebben. Deze kloof bemoeilijkt het ontwerpen van besturingssystemen voor prothesen die nauwkeurig, comfortabel en betaalbaar zijn voor de mensen die ze het hardst nodig hebben.
Het opbouwen van een databasisondergrond uit de echte wereld
Om dit probleem aan te pakken, verzamelden de onderzoekers een nieuwe dataset van 20 volwassenen in Peru met ledemaatverlies op onderarmniveau als gevolg van trauma of aangeboren oorzaken. Elke deelnemer droeg twee kleine draadloze sensoreenheden op het overgebleven deel van de onderarm, met zes meetpunten verspreid over de belangrijkste flexor- en extensor-spiergroepen. De deelnemers probeerden drie eenvoudige polsgerelateerde gebaren — buigen van de pols, strekken ervan en knijpen met duim en middelvinger — terwijl ze zittend en staand waren en met verschillende elleboog- en schouderposities. In totaal voerde elke persoon 240 pogingengebaren uit, wat honderden bestanden opleverde die vastleggen hoe spiersignalen veranderen met houding en inspanning. Door zich uitsluitend te richten op mensen met amputaties en te standaardiseren hoe elektroden werden geplaatst, creëerde het team een realistische, publiek beschikbare dataset die specifiek is ontworpen voor onderzoek naar prothetische besturing.
Algoritmen leren het lichaam te lezen
Met deze dataset testte het team vier typen machinaal-leren-algoritmen: neurale netwerken, random forests, gradient boosting trees en beslissingsbomen. Ze verdeelden elk spiersignaal in korte overlappende tijdvensters, die nabootsen hoe een echte prothese continu naar het lichaam zou luisteren. Uit elk venster haalden ze een kleine set numerieke kenmerken die signaalsterkte, variatie en complexiteit over alle zes kanalen vastleggen. Om redundantie te vermijden en de rekencapaciteit te verminderen, gebruikten ze een afstandsgebaseerde methode om de vijf meest informatieve kenmerken te selecteren. In plaats van één algoritme meerdere bewegingen tegelijk te laten herkennen, bouwden ze een tweestaps "gestapeld" model. De eerste stap bepaalt of de persoon rust of beweging vertoont; de tweede stap, alleen aangeroepen wanneer beweging wordt gedetecteerd, bepaalt of de actie polsflexie of -extensie is. 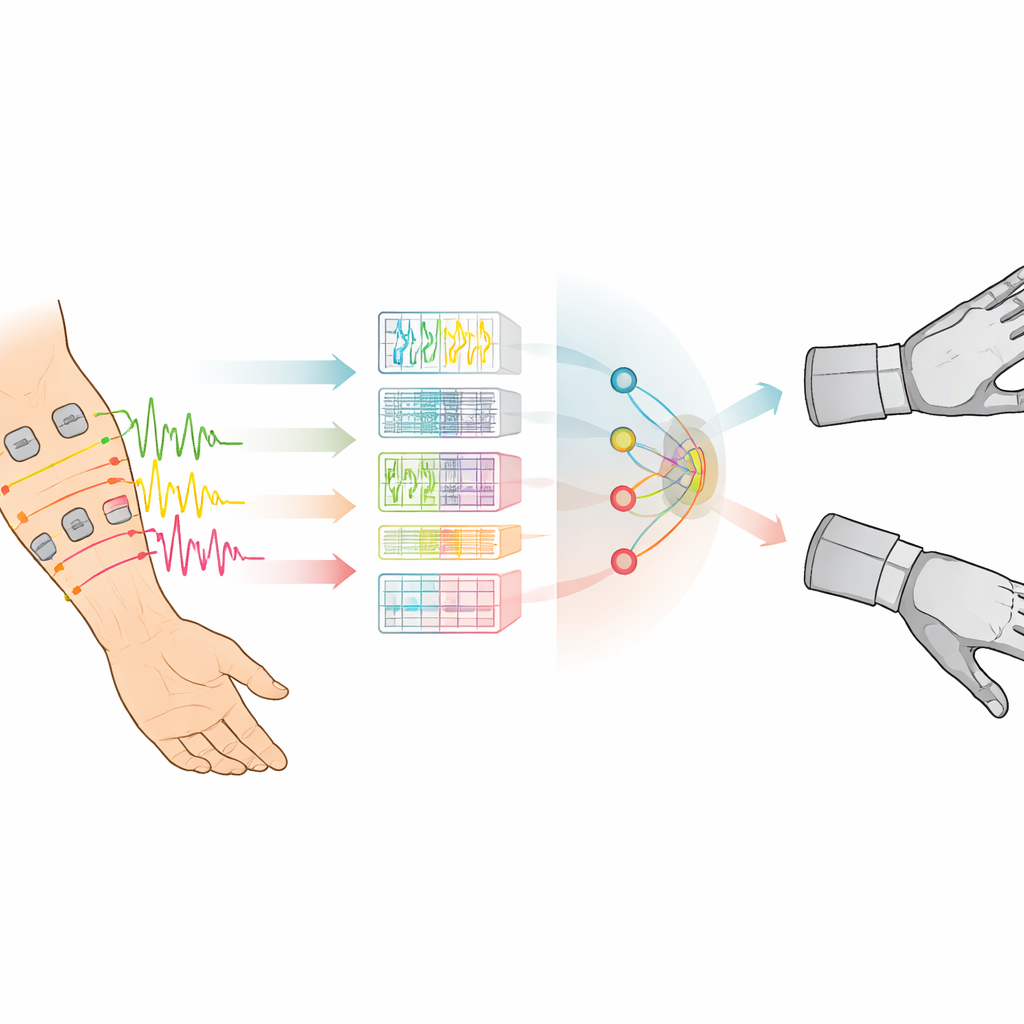
Hoe goed het systeem presteerde
De gestapelde modellen opgebouwd uit beslissingsboomfamilies, in het bijzonder random forests en gradient boosting, presteerden het best. Met slechts vijf belangrijke kenmerken en iets langere tijdvensters bereikte de gecombineerde aanpak gemiddelde nauwkeurigheden boven 97% bij het onderscheiden van rust, flexie en extensie voor individuele gebruikers. Neurale netwerken waren daarentegen minder stabiel en gevoeliger voor verschillen tussen personen. De studie onderzocht ook welke gebruikerskenmerken de prestaties beïnvloedden. Mensen met aangeboren ledemaatverschillen en degenen met meer distale (vijler van de elleboog gelegen) amputaties bereikten doorgaans hogere nauwkeurigheid, waarschijnlijk omdat hun resterende spieren gezonder en beter gedefinieerd zijn. Deelnemers die al een gemiddelde tijd met het ledemaatverlies leefden, lieten ook bijzonder sterke resultaten zien, wat suggereert dat langdurige aanpassing van spieren en bewegingsgewoonten van belang is.
Van laboratorium naar een laaggeprijsd apparaat
Om te zien of deze algoritmen op betaalbare hardware konden draaien, zetten de onderzoekers ze in op een compacte Raspberry Pi Zero 2 W-computer, een platform klein genoeg om in een prothetische hand te passen. Modellen die kortere tijdvensters en boomgebaseerde methoden gebruikten, konden polsbewegingen quasi realtime classificeren, hoewel sommige grotere configuraties de grenzen van het apparaat overschreden en verdere optimalisatie vereisen. Initiële tests met één deelnemer toonden aan dat gestapelde modellen met gradient boosting bedoelde bewegingen nauwkeurig konden identificeren in verschillende armposities, terwijl meerderheidsstemming over recente voorspellingen hielp korte foutlezingen glad te strijken.
Wat dit betekent voor toekomstige kunsthanden
Eenvoudig gezegd toont deze studie aan dat een slimme maar relatief eenvoudige combinatie van algoritmen spiersignalen van echte prothesegebruikers betrouwbaar kan interpreteren en op goedkope elektronica kan draaien. Door hun werk te funderen op een toegewijde dataset van mensen met amputaties en de modellen zorgvuldig per individu af te stemmen, schetsen de auteurs een pad naar goedkope, gepersonaliseerde prothetische handen die op natuurlijke wijze reageren op de intenties van een gebruiker. De volgende stappen zijn het inbouwen van dit systeem in fysieke apparaten en het testen tijdens alledaagse activiteiten, waarmee we dichterbij kunsthanden komen die niet alleen technisch geavanceerd zijn maar ook breed toegankelijk en makkelijker in het dagelijks leven te gebruiken.
Bronvermelding: Garcia, J.G., Luque, E.F., Romero, E. et al. Assessment of artificial intelligence-based control algorithms to be implemented in an affordable transradial myoelectric prosthesis. Sci Rep 16, 14382 (2026). https://doi.org/10.1038/s41598-026-43000-1
Trefwoorden: myo-elektrische prothese, oppervlakte-elektromyografie, machinaal leren, amputatie van de bovenste ledemaat, prothetische besturing