Clear Sky Science · fr
Évaluation d’algorithmes de commande fondés sur l’intelligence artificielle à implémenter dans une prothèse myoélectrique transradiale abordable
Nouvelles voies pour rendre les mains artificielles plus accessibles
Pour des millions de personnes vivant avec une amputation de l’avant-bras, en particulier dans les pays à revenu faible ou intermédiaire, les mains artificielles avancées restent hors de portée en raison du coût et de la complexité technique. Cette étude explore comment des programmes informatiques intelligents peuvent traduire de faibles signaux électriques émis par les muscles en mouvements simples de la main, dans le but de construire une main prothétique abordable, fiable et adaptée à chaque utilisateur. 
Pourquoi les signaux musculaires sont importants
Chaque fois que nous bougeons nos mains, nos muscles produisent de faibles signaux électriques repérables à la surface de la peau. Ces signaux, appelés électromyographie de surface, peuvent révéler le mouvement que la personne tente d’effectuer, même si la main est absente. De nombreuses mains prothétiques modernes s’appuient sur ces signaux, mais dans la pratique ils sont bruités et instables. Les capteurs peuvent bouger, les muscles être faibles ou cicatriciels, et la position du bras modifie les signaux. Les systèmes qui fonctionnent bien chez des personnes non amputées échouent souvent chez de véritables utilisateurs de prothèses, qui peuvent disposer de moins de muscles fonctionnels et d’une anatomie plus variable. Cet écart complique la conception de systèmes de commande prothétique précis, confortables et abordables pour ceux qui en ont le plus besoin.
Construire une base de données réaliste
Pour s’attaquer à ce problème, les chercheurs ont collecté un nouvel ensemble de données auprès de 20 adultes au Pérou présentant une perte de membre au niveau de l’avant-bras, d’origine traumatique ou congénitale. Chaque personne portait deux petits capteurs sans fil sur le moignon, avec six points de détection répartis sur les principaux groupes musculaires fléchisseurs et extenseurs. Les participants ont tenté trois gestes simples liés au poignet — flexion, extension et pincement avec le pouce et le majeur — assis et debout, et avec différentes positions du coude et de l’épaule. Au total, chaque personne a effectué 240 essais de geste, générant des centaines de fichiers capturant la façon dont les signaux musculaires varient selon la posture et l’effort. En se concentrant uniquement sur des personnes amputées et en standardisant le placement des électrodes, l’équipe a créé un jeu de données réaliste et public, spécifiquement conçu pour la recherche sur la commande des prothèses.
Apprendre aux algorithmes à lire le corps
Avec cet ensemble de données en main, l’équipe a testé quatre familles d’algorithmes d’apprentissage automatique : réseaux de neurones, forêts aléatoires, arbres de gradient boosting et arbres de décision. Ils ont découpé chaque signal musculaire en courtes fenêtres temporelles chevauchantes, imitant la façon dont une main prothétique écouterait continuellement le corps. Pour chaque fenêtre, ils ont extrait un petit ensemble de caractéristiques numériques capturant l’amplitude, la variation et la complexité des signaux sur les six canaux. Pour éviter les redondances et réduire la charge de calcul, ils ont utilisé une méthode basée sur la distance pour sélectionner les cinq caractéristiques les plus informatives. Plutôt que de demander à un seul algorithme de reconnaître plusieurs mouvements simultanément, ils ont construit un modèle empilé en deux étapes. La première étape décide si la personne est au repos ou en mouvement ; la seconde étape, appelée uniquement en cas de mouvement, distingue la flexion de la main de son extension. 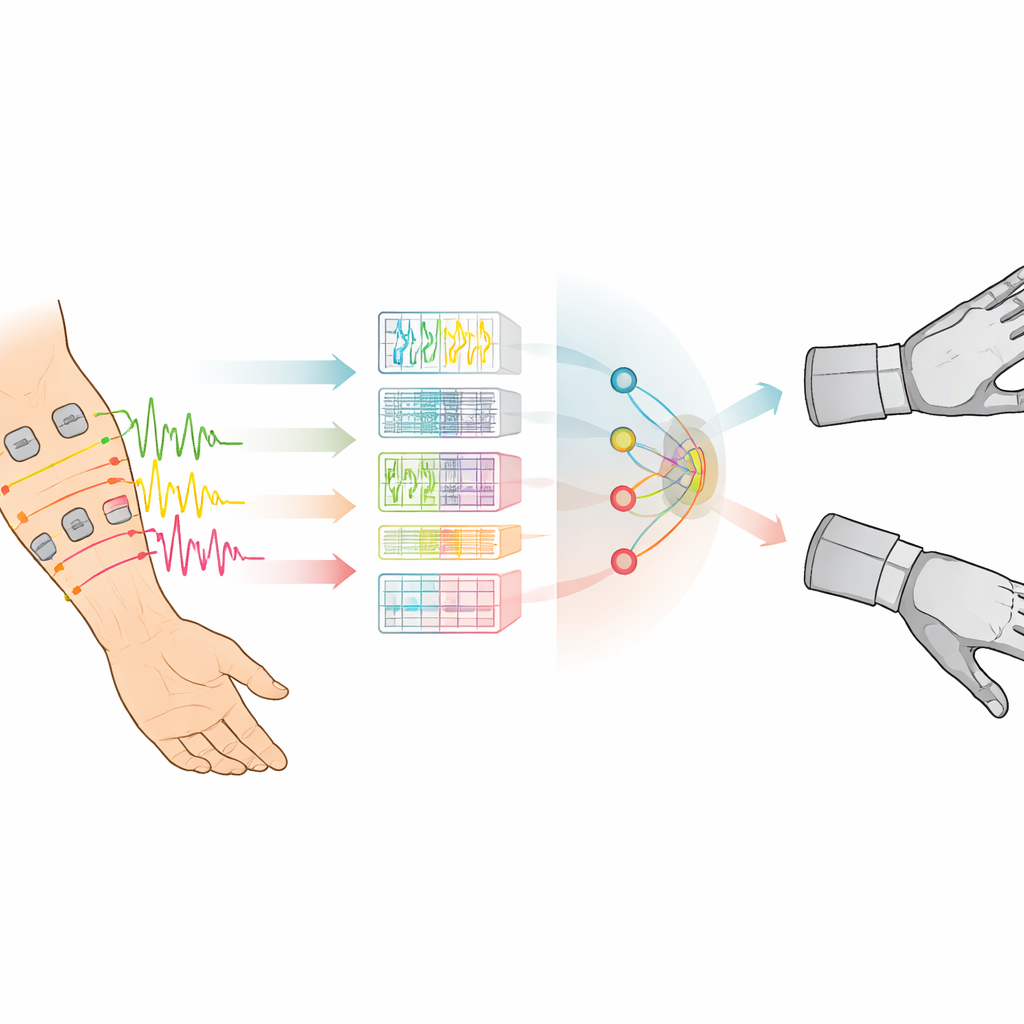
Performance du système
Les modèles empilés issus des familles d’arbres de décision, en particulier les forêts aléatoires et le gradient boosting, ont donné les meilleures performances. En n’utilisant que cinq caractéristiques clés et des fenêtres temporelles légèrement plus longues, l’approche combinée a atteint des précisions moyennes supérieures à 97 % pour distinguer repos, flexion et extension chez des utilisateurs individuels. Les réseaux de neurones, en revanche, se sont montrés moins stables et plus sensibles aux différences interindividuelles. L’étude a également examiné quelles caractéristiques des utilisateurs influençaient les performances. Les personnes avec des différences congénitales du membre et celles avec des amputations plus distales (plus loin du coude) ont tendance à obtenir une meilleure précision, probablement parce que leurs muscles résiduels sont en meilleur état et mieux définis. Les participants vivant avec la perte de membre depuis une durée intermédiaire ont aussi montré de bons résultats, ce qui suggère que l’adaptation musculaire et les habitudes de mouvement à long terme jouent un rôle.
Du laboratoire à un dispositif à faible coût
Pour vérifier si ces algorithmes pouvaient fonctionner sur du matériel abordable, l’équipe les a déployés sur un petit ordinateur Raspberry Pi Zero 2 W, une plateforme suffisamment compacte pour tenir dans une main prothétique. Les modèles utilisant des fenêtres temporelles courtes et des méthodes basées sur les arbres ont pu classer les mouvements du poignet en quasi-temps réel, bien que certaines configurations plus lourdes aient dépassé les limites de l’appareil et nécessitent encore une optimisation. Des tests initiaux avec un participant ont montré que des modèles empilés utilisant le gradient boosting pouvaient identifier avec précision les mouvements intentionnels dans diverses positions du bras, tandis qu’un vote majoritaire sur les prédictions récentes contribuait à lisser les erreurs ponctuelles.
Ce que cela signifie pour les futures mains artificielles
Concrètement, cette étude montre qu’une combinaison d’algorithmes intelligente mais relativement simple peut interpréter de manière fiable les signaux musculaires de véritables utilisateurs de prothèses et s’exécuter sur de l’électronique peu coûteuse. En ancrant leur travail sur un jeu de données dédié de personnes amputées et en ajustant finement les modèles par individu, les auteurs tracent une voie vers des mains prothétiques personnalisées et peu onéreuses qui répondent naturellement aux intentions de l’utilisateur. Les prochaines étapes consisteront à intégrer ce système dans des dispositifs physiques et à le tester lors d’activités quotidiennes, pour se rapprocher de mains artificielles à la fois techniquement avancées, largement accessibles et plus faciles à vivre au quotidien.
Citation: Garcia, J.G., Luque, E.F., Romero, E. et al. Assessment of artificial intelligence-based control algorithms to be implemented in an affordable transradial myoelectric prosthesis. Sci Rep 16, 14382 (2026). https://doi.org/10.1038/s41598-026-43000-1
Mots-clés: prothèse myoélectrique, électromyographie de surface, apprentissage automatique, amputation du membre supérieur, commande de prothèse