Clear Sky Science · ja
手頃な価格の橈骨断端型筋電義手に実装するための人工知能ベース制御アルゴリズムの評価
人工の手をより手の届きやすくする新しい道
前腕切断を抱えて生活する何百万もの人々にとって、とくに低・中所得国では、先進的な人工手は費用や技術的複雑さのために手の届かない存在であり続けています。本研究は、筋肉からの微弱な電気信号を簡潔な手の動作に変換するスマートな計算プログラム(アルゴリズム)を検討し、信頼性が高く利用者ごとに調整可能な、手頃な価格の義手を構築することを目標としています。 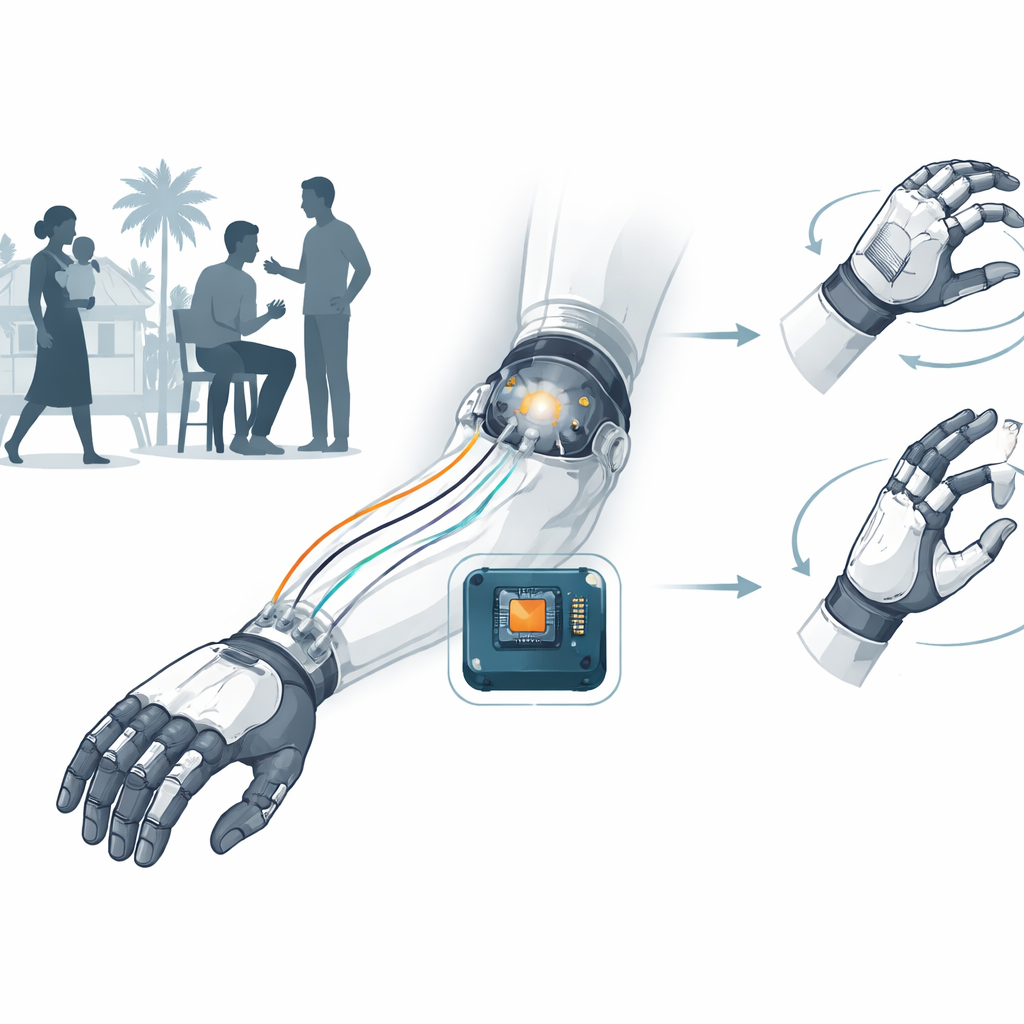
筋電信号が重要な理由
私たちが手を動かすとき、筋肉は皮膚表面で計測できる微弱な電気信号を発します。これらは表面筋電図として知られ、手が失われていても本人がどの動作を試みているかを示唆します。多くの現代的義手はこれらの信号に依存しますが、実際には信号は雑音が多く不安定です。センサーパッドがずれたり、筋肉が弱かったり瘢痕化していたり、腕の姿勢で信号が変わったりします。健常者を対象にうまく機能するシステムでも、実際の義手利用者では失敗することがあり、利用可能な筋肉が少ない、解剖学的差異が大きいなどの事情が影響します。このギャップのために、正確で快適かつ安価な義肢制御システムの設計は難しいままでした。
実世界データの基盤をつくる
この問題に取り組むため、研究者たちはペルーの成人20名から新しいデータセットを収集しました。対象は外傷や先天性の理由で前腕レベルの肢体欠損を持つ人々です。各被験者は残存前腕に小型の無線センサーユニットを2個装着し、主要な屈筋群と伸筋群にまたがる6つの計測点で信号をとりました。参加者は座位と立位、肘や肩の異なる位置で、手首の屈曲、伸展、親指と中指でつまむ動作という3つの簡単な手根関連ジェスチャーを試みました。各人は合計で240回の動作試行を行い、姿勢や力の変化に伴う筋電信号の変動を捉える何百ものファイルが生成されました。切断者のみを対象に電極配置を標準化することで、チームは義肢制御研究に特化した現実的で公開可能なデータセットを作成しました。
身体を読み取るアルゴリズムの学習
このデータセットを用いて、研究チームは4種類の機械学習アルゴリズムを評価しました:ニューラルネットワーク、ランダムフォレスト、勾配ブースティング木(Gradient Boosting)、および決定木です。各筋電信号は、実際の義手が連続的に身体を「聞く」様子を模倣する短い重なりのある時間窓に分割されました。各窓からは、信号の強さ、変動、複雑さを捉える少数の数値的特徴量を抽出しました。冗長性を避け計算負荷を下げるために、距離に基づく方法で最も情報量の多い5つの特徴を選択しました。複数の動作を一度に認識させるのではなく、二段階の「積み重ね(スタック)」モデルを構築しました。第一段階で休止(静止)か動作かを判定し、動作と判定された場合にのみ第二段階が呼び出され、手首の屈曲か伸展かを識別します。 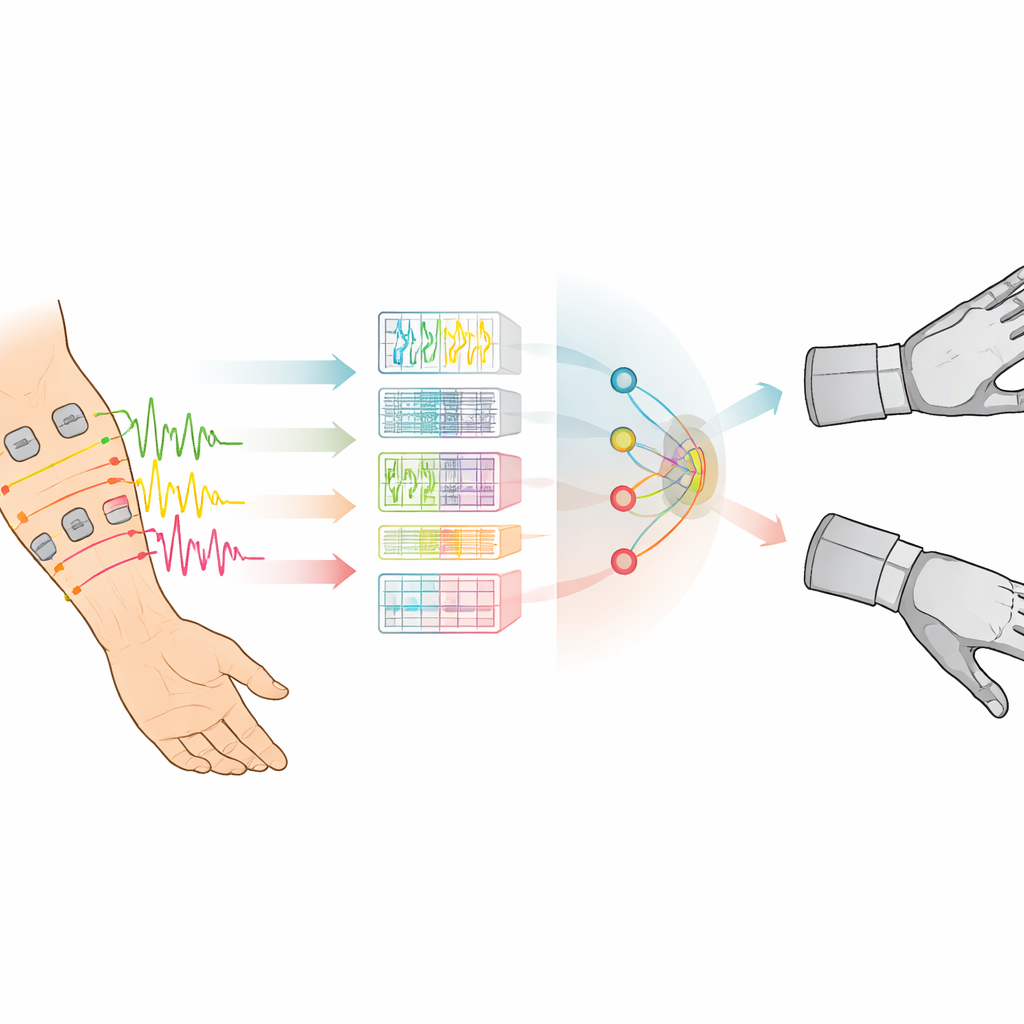
システムの性能
決定木系、特にランダムフォレストと勾配ブースティングから構築したスタックモデルが最良の成績を示しました。たった5つの主要特徴量とやや長めの時間窓を用いることで、個々の利用者に対して休止・屈曲・伸展を区別する平均精度は97%を超えました。これに対しニューラルネットワークは安定性に欠け、個人差に敏感でした。研究はまた、どの利用者特性が性能に影響するかも調べました。先天性の肢差や肘から遠位(肘に近くない)での切断を持つ人は、残存筋が比較的健康で明瞭であることから高い精度を達成する傾向がありました。切断後の経過期間が中程度の参加者は特に良好な結果を示し、筋肉や動作習慣の長期的な適応が重要であることを示唆しています。
研究室から低コスト装置へ
これらのアルゴリズムが手頃なハードウェア上で動作するかを確認するため、チームは小型のRaspberry Pi Zero 2 Wコンピュータに実装しました。このプラットフォームは義手内部に収まるほど小型です。短い時間窓と木構造に基づく手法を用いたモデルはほぼリアルタイムで手首の動作を分類できましたが、より大きな構成ではデバイスの限界を超えるものもあり、さらなる最適化が必要です。1人の参加者を用いた初期テストでは、勾配ブースティングを用いたスタックモデルがさまざまな腕の位置で意図した動作を正確に識別でき、直近の予測に対する多数決を取る手法が一時的な誤読を平滑化するのに有効でした。
将来の人工手にもたらす意味
平たく言えば、本研究は比較的単純で賢いアルゴリズムの組み合わせが、実際の義手利用者からの筋電信号を信頼性高く解釈でき、安価な電子機器上で動作させられることを示しています。切断者から得た専用データセットに基づき、各個人に合わせてモデルを慎重に調整することで、利用者の意図に自然に応答する低コストの個別化された義手への道筋が示されました。次のステップは、このシステムを物理的な装置に組み込み、日常活動中に評価することであり、技術的に高度であるだけでなく、幅広くアクセス可能で日常生活に適した人工手に近づくことを目指します。
引用: Garcia, J.G., Luque, E.F., Romero, E. et al. Assessment of artificial intelligence-based control algorithms to be implemented in an affordable transradial myoelectric prosthesis. Sci Rep 16, 14382 (2026). https://doi.org/10.1038/s41598-026-43000-1
キーワード: 筋電義手, 表面筋電図, 機械学習, 上肢切断, 義肢制御