Clear Sky Science · zh
用于具有执行器饱和性的飞行并联机器人神经学习阻抗控制的无力传感器交互力矩估计
能够安全接触世界的机器人助手
不仅能飞行还能够推动、拉动或扭转物体的空中机器人,未来有望检查桥梁、修复电力线路或在难以到达的地方组装结构。然而,要让飞行器在物理接触环境时既强壮、又精确且足够安全,极为艰难。本文提出了一种新的控制方法,针对一种特殊的多无人机机器人——它能承载更重的负载并以更温和的方式与环境交互,无需笨重的力传感器,并能在电机功率限制内工作。
作为一个强大机器人协同行动的飞行团队
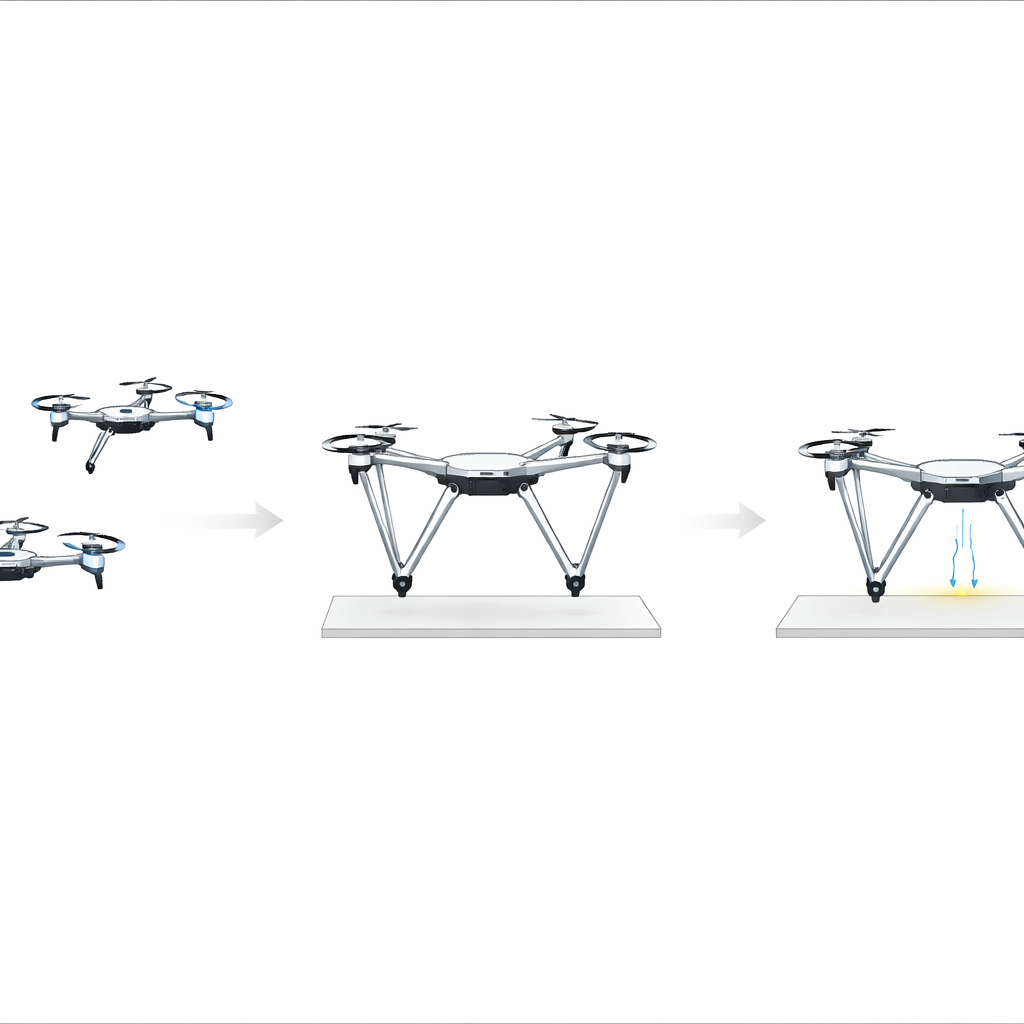
研究者并非在单个无人机上安装小型机械臂,而是研究一种“飞行并联机器人”,由三架四旋翼通过刚性连杆连接到一个中心移动平台。协同工作时,这些无人机能够支撑更大的有效载荷并更均匀地施加力,比单个飞行器更有优势。但该设计也带来严重挑战:每架无人机可产生的推力严格受限,总体运动复杂,并且当受风扰动或在墙面、天花板等表面施力时,机器人必须保持稳定。
在不增加沉重传感器的情况下感知力
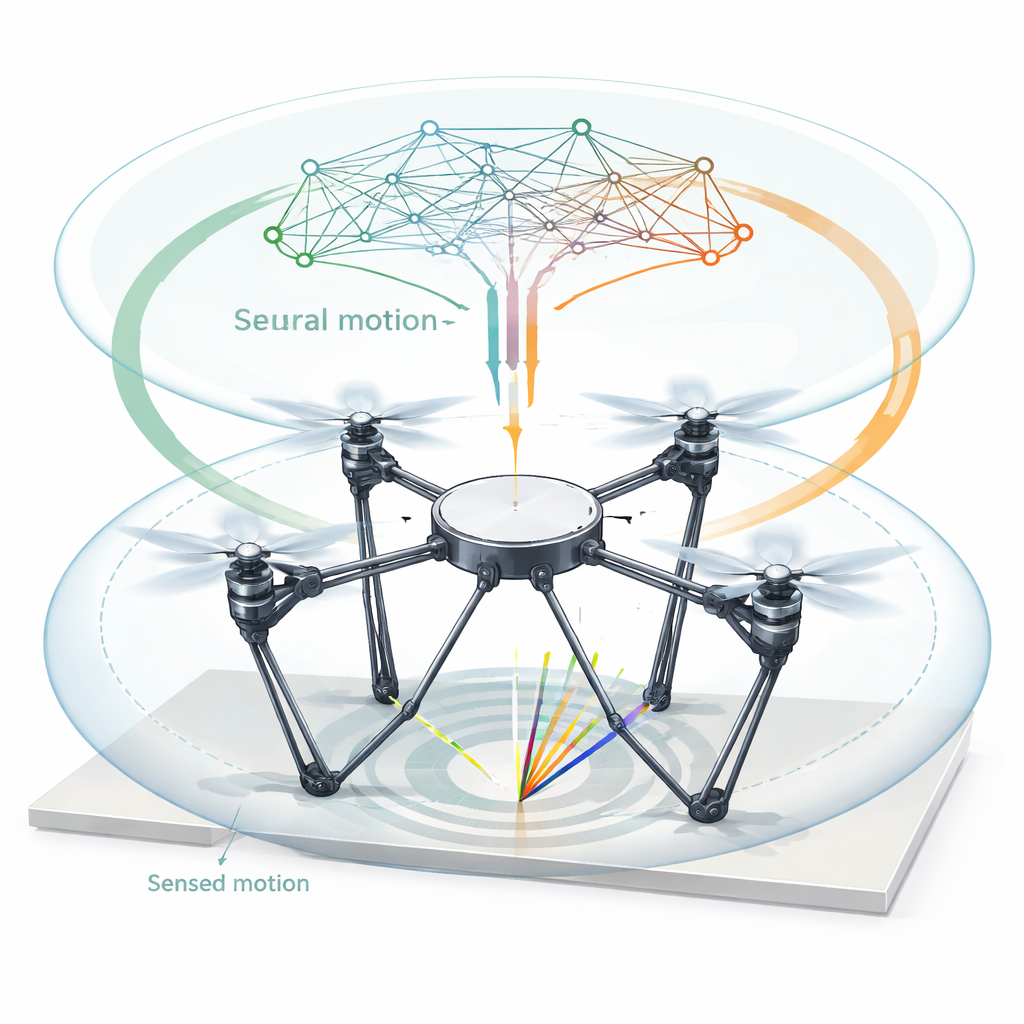
大多数与环境发生物理交互的机器人在接触点使用专用力传感器。在飞行器上,额外传感器意味着额外重量和更短的续航时间。为避免这种情况,作者设计了一个“力矩观测器”,通过观察机器人在无人机推力作用下运动如何变化来估计接触产生的力和力矩。该观测器基于广义动量的思想:将机器人的质量、运动与已知的推力输入结合起来,算法重构作用在平台上的外部推拉力。内置的低通滤波器平滑测量噪声,使得即使运动数据不完美,估计出的力仍然可靠。
教会飞行机器人像弹簧一样顺从
为了使交互温和且可预测,团队采用了一种称为阻抗控制的方法,使机器人表现得仿佛通过可调的质量—弹簧—阻尼系统与环境相连。平台不再试图刚性保持位置,而是在接触时能够“让步”,类似于调校良好的悬挂系统。当机器人的真实动力学仅为粗略已知且无人机容易触及推力极限时,设计这种行为就更加困难。作者通过嵌入基于径向基函数神经网络的学习系统来应对这一点。这些网络持续逼近未知影响(例如未建模的气动效应和变化的有效载荷),并且基于Lyapunov稳定性理论推导的自适应律确保学习过程不会使机器人失稳。
在电机达到极限时保持稳定
一个关键的实际风险是执行器饱和:每个旋翼的推力都有上限。如果控制器要求的推力超过电机能提供的量,这种不匹配可能导致大的跟踪误差甚至失控。作者没有将所有变量重塑到一个复杂的新坐标系中,而是引入了一个辅助动态系统,专门补偿命令的力矩和实际可实现推力之间的差异。这个额外回路与阻抗控制器和神经网络协同工作,即使在电机运行于边界时也能保持整体行为的稳定。
将新控制方法付诸检验
研究者在机械仿真环境中构建了飞行并联机器人的详细虚拟原型,并将其与实时控制模型连接,对该方法进行了评估。他们让系统承受测量噪声、有效载荷变化和严格的推力限制,以模拟真实工况。新控制器与两种备选方案比较:一种是标准的比例—微分控制器,另一种是较简单的阻抗控制器(同样使用估计力但缺乏神经学习和饱和补偿)。在自由飞行轨迹跟踪和对虚拟表面的接触任务中,所提出的方法均实现了最小的位置与姿态误差、最准确的力调节和最稳定的表现,同时保持电机指令在安全界限内。
这对未来空中作业者的重要性
通俗地说,这项工作展示了如何协调一组无人机,使其在空中像一个单一、强大且出人意料地温和的机器人之手一样工作。通过在不使用额外传感器的情况下估计力、在线学习不确定的动力学并尊重电机的物理极限,所提出的控制方案使飞行并联机器人能够安全可靠地接触和操纵环境。这种力量、适应性和柔顺性的结合,是朝着能够在对人类困难或危险的地点执行实际维护与装配任务的空中机器人迈出的重要一步。
引用: Zhu, M., Guo, Y., Gong, D. et al. Force sensorless interaction wrench estimation for neural-learning impedance control of a flying parallel robot with actuator saturation. Sci Rep 16, 12605 (2026). https://doi.org/10.1038/s41598-026-42788-2
关键词: 空中机器人, 多无人机协作, 力控制, 神经网络控制, 物理交互