Clear Sky Science · pl
Ocena sił i momentów bez czujników dla neuronowego uczenia kontroli impedancji latającego robota równoległego z nasyceniem siłowników
Robotyczni pomocnicy, którzy potrafią bezpiecznie dotykać świata
Roboty powietrzne, które nie tylko latają, lecz także pchają, ciągną lub skręcają przedmioty, mogłyby pewnego dnia kontrolować mosty, naprawiać linie energetyczne lub montować konstrukcje w trudno dostępnych miejscach. Uczynienie maszyn latających wystarczająco silnymi, precyzyjnymi i bezpiecznymi do fizycznej interakcji ze środowiskiem jest jednak niezwykle trudne. W artykule przedstawiono nową metodę sterowania dla specjalnego typu wielodronowego robota, która pozwala przenosić większe ładunki i delikatnie oddziaływać na otoczenie, bez konieczności stosowania ciężkich czujników siły i przy zachowaniu ograniczeń mocy silników.
Zespół latających maszyn działających jak jeden silny robot
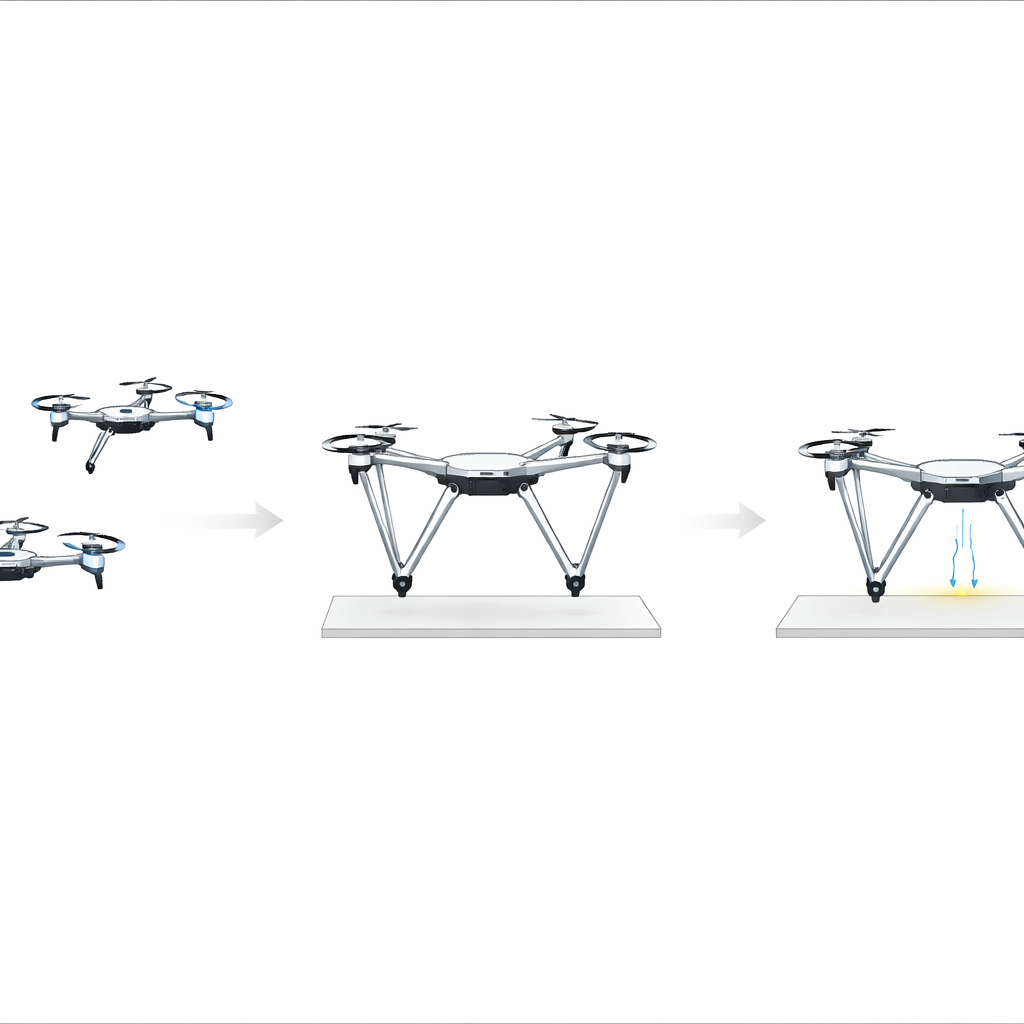
Zamiast montować niewielkie ramię na pojedynczym dronie, badacze analizują „latającego robota równoległego” zbudowanego z trzech quadrotorów połączonych sztywnymi nogami z centralną ruchomą platformą. Działając wspólnie, drony mogą podtrzymywać większe ładunki i rozkładać siły bardziej równomiernie niż pojedynczy pojazd. Taka konstrukcja wiąże się jednak z poważnymi wyzwaniami: siły, które może wygenerować każdy dron, są ściśle ograniczone, ruch całego układu jest złożony, a robot musi zachować stabilność przy działaniu wiatru i podczas naciskania na powierzchnie, takie jak ściany czy sufity.
Wyczuwanie sił bez dodawania ciężkich czujników
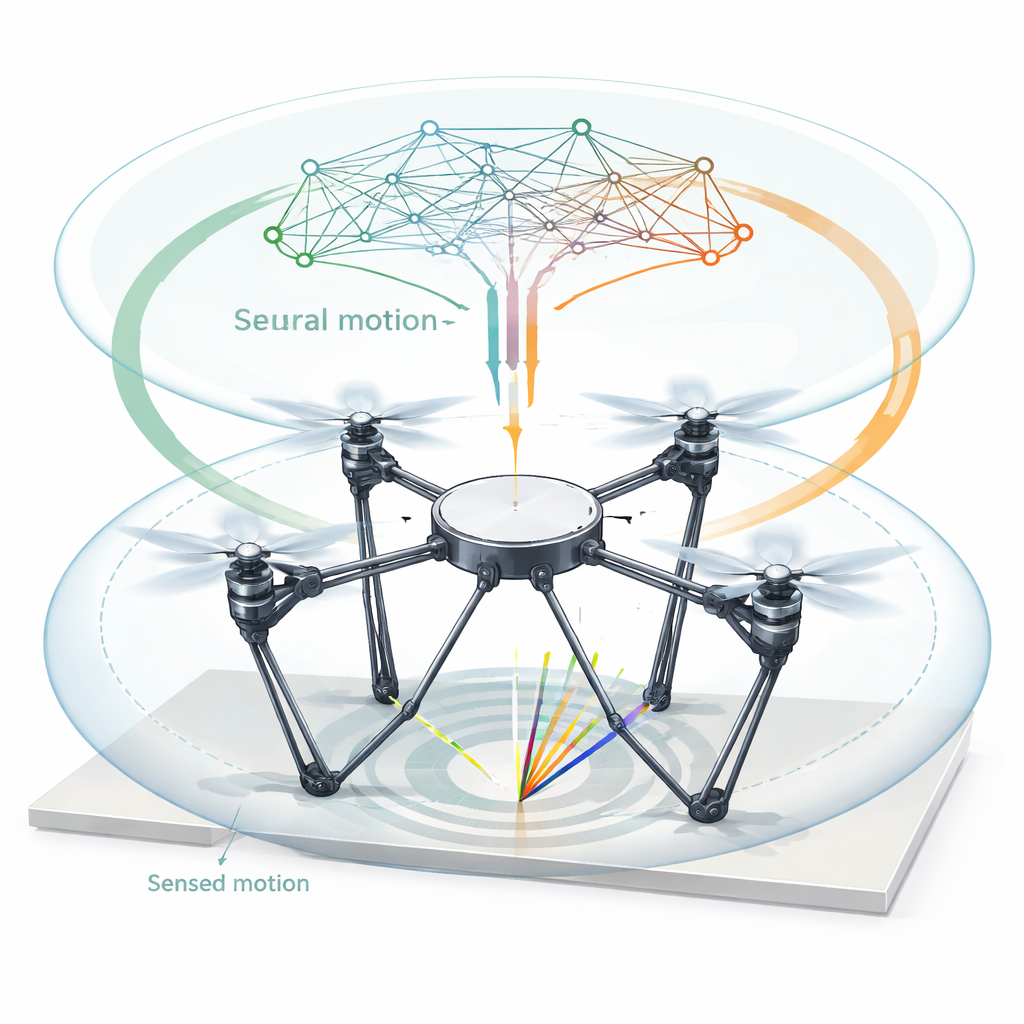
Większość robotów, które fizycznie oddziałują z otoczeniem, wykorzystuje dedykowane czujniki siły w punkcie kontaktu. W maszynie latającej dodatkowe czujniki to dodatkowa waga i krótszy czas lotu. Aby tego uniknąć, autorzy projektują „obserwator wrencha”, który szacuje siły i momenty kontaktowe, obserwując zmiany ruchu robota w odpowiedzi na ciąg generowany przez drony. Obserwator bazuje na idei uogólnionego pędu: łącząc masę robota, jego ruch i znane sygnały ciągu, algorytm rekonstruuje zewnętrzne pchnięcia lub pociągnięcia działające na platformę. Wbudowany filtr dolnoprzepustowy wygładza szumy pomiarowe, dzięki czemu oszacowane siły pozostają wiarygodne nawet przy niedoskonałych danych ruchu.
Nauka robota latania, by ustępował jak sprężyna
Aby interakcje były delikatne i przewidywalne, zespół stosuje podejście zwane kontrolą impedancji, które sprawia, że robot zachowuje się tak, jakby był połączony z otoczeniem przez regulowany układ masa–sprężyna–tłumik. Zamiast utrzymywać pozycję sztywno, platforma może „ustąpić” w reakcji na kontakt, podobnie jak dobrze wyregulowane zawieszenie. Zaprojektowanie takiego zachowania jest trudne, gdy prawdziwe dynamiki robota są jedynie w przybliżeniu znane, a drony łatwo osiągają limity ciągu. Autorzy rozwiązują to, osadzając system uczący oparty na sieciach neuronowych z funkcjami baz radialnych. Sieci te w czasie rzeczywistym aproksymują nieznane efekty, takie jak niezamodelowana aerodynamika czy zmienne ładunki, a prawo adaptacji wyprowadzone z teorii stabilności Lyapunova zapewnia, że proces uczenia nie destabilizuje robota.
Utrzymanie stabilności, gdy silniki osiągają swoje granice
Kluczowym praktycznym ryzykiem jest nasycenie siłowników: każdy wirnik może generować tylko określony ciąg. Jeśli regulator wymaga więcej ciągu niż silniki są w stanie dostarczyć, różnica może powodować duże błędy śledzenia, a w skrajnych przypadkach utratę kontroli. Zamiast przekształcać wszystkie zmienne do skomplikowanego układu współrzędnych, autorzy wprowadzają pomocniczy system dynamiczny, który specyficznie kompensuje różnicę między zadanym wrenchem a rzeczywistym dostępnym ciągiem. Dodatkowa pętla współpracuje z regulatorem impedancji i sieciami neuronowymi, utrzymując stabilność całego układu, nawet gdy silniki pracują na swoich granicach.
Testy nowej metody sterowania
Badacze oceniają swoje podejście, korzystając ze szczegółowego wirtualnego prototypu latającego robota równoległego zbudowanego w środowisku symulacji mechanicznej i sprzężonego w czasie rzeczywistym z modelem sterowania. Poddają system wpływowi szumów pomiarowych, zmian ładunku i ścisłym ograniczeniom ciągu, aby odzwierciedlić warunki rzeczywiste. Nowy regulator porównano z dwiema alternatywami: standardowym regulatorem proporcjonalno‑różniczkowym oraz prostszym regulatorem impedancji, który również wykorzystuje oszacowane siły, lecz nie ma uczenia neuronowego ani kompensacji nasycenia. Zarówno w śledzeniu trajektorii w locie swobodnym, jak i w zadaniach kontaktowych z wirtualną powierzchnią, proponowana metoda osiąga najmniejsze błędy pozycji i orientacji, najdokładniejsze regulowanie sił oraz najbardziej stabilne zachowanie, przy jednoczesnym utrzymaniu poleceń silników w bezpiecznych granicach.
Dlaczego to ważne dla przyszłych latających pracowników
Mówiąc prostymi słowami, praca pokazuje, jak zespół dronów może być skoordynowany tak, by działać jak jedna, potężna i zaskakująco delikatna długa robotyczna w powietrzu. Dzięki oszacowywaniu sił bez dodatkowych czujników, uczeniu niepewnych dynamik w locie oraz respektowaniu fizycznych ograniczeń silników, proponowany schemat sterowania pozwala latającemu robotowi równoległemu bezpiecznie i niezawodnie dotykać oraz manipulować otoczeniem. To połączenie siły, adaptacyjności i podatności jest krokiem w stronę robotów powietrznych, które mogą wykonywać praktyczne prace konserwacyjne i montażowe w miejscach trudnych lub niebezpiecznych dla ludzi.
Cytowanie: Zhu, M., Guo, Y., Gong, D. et al. Force sensorless interaction wrench estimation for neural-learning impedance control of a flying parallel robot with actuator saturation. Sci Rep 16, 12605 (2026). https://doi.org/10.1038/s41598-026-42788-2
Słowa kluczowe: roboty powietrzne, współpraca wielu dronów, sterowanie siłą, sterowanie z użyciem sieci neuronowych, interakcja fizyczna