Clear Sky Science · es
Estimación de esfuerzo de interacción sin sensores de fuerza para control de impedancia con aprendizaje neuronal de un robot paralelo volador con saturación de actuadores
Ayudantes robóticos que pueden tocar el mundo con seguridad
Robots aéreos que no solo puedan volar, sino también empujar, tirar o girar objetos podrían inspeccionar puentes, reparar líneas eléctricas o ensamblar estructuras en lugares de difícil acceso. Sin embargo, lograr que máquinas voladoras sean lo bastante fuertes, precisas y seguras para tocar físicamente su entorno es extremadamente difícil. Este artículo presenta un nuevo método de control para un tipo especial de robot multi-dron que puede transportar cargas más pesadas e interactuar con suavidad con el entorno, sin necesitar pesados sensores de fuerza y permaneciendo dentro de los límites de potencia de sus motores.
Un equipo volador que actúa como un único robot potente
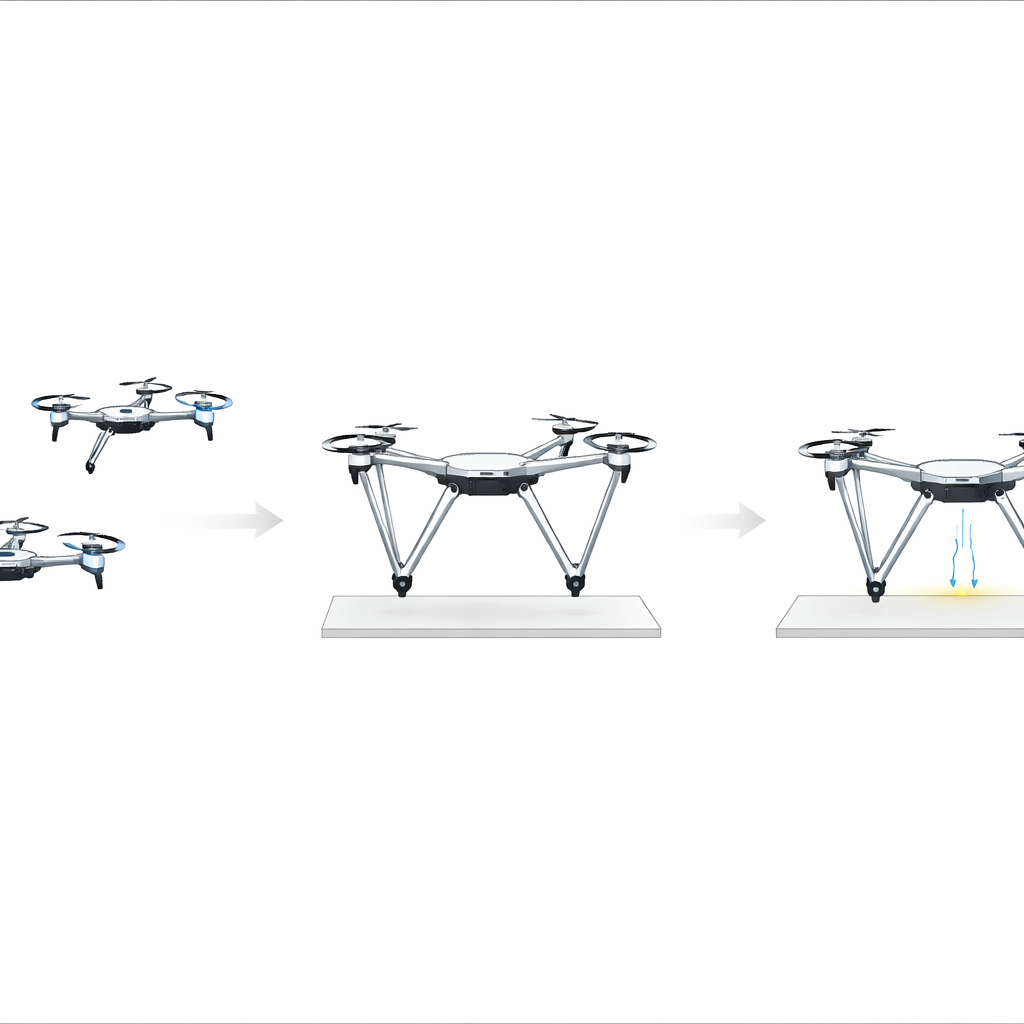
En lugar de montar un pequeño brazo en un solo dron, los investigadores estudian un “robot paralelo volador” formado por tres cuadricópteros conectados mediante patas rígidas a una plataforma central móvil. Al trabajar juntos, los drones pueden soportar cargas mayores y aplicar fuerzas de forma más uniforme que un único vehículo. No obstante, este diseño también plantea desafíos importantes: las fuerzas que puede generar cada dron están estrictamente limitadas, el movimiento global es complejo y el robot debe permanecer estable mientras le afectan ráfagas de viento y mientras empuja contra superficies como paredes o techos.
Sintiendo fuerzas sin añadir sensores pesados
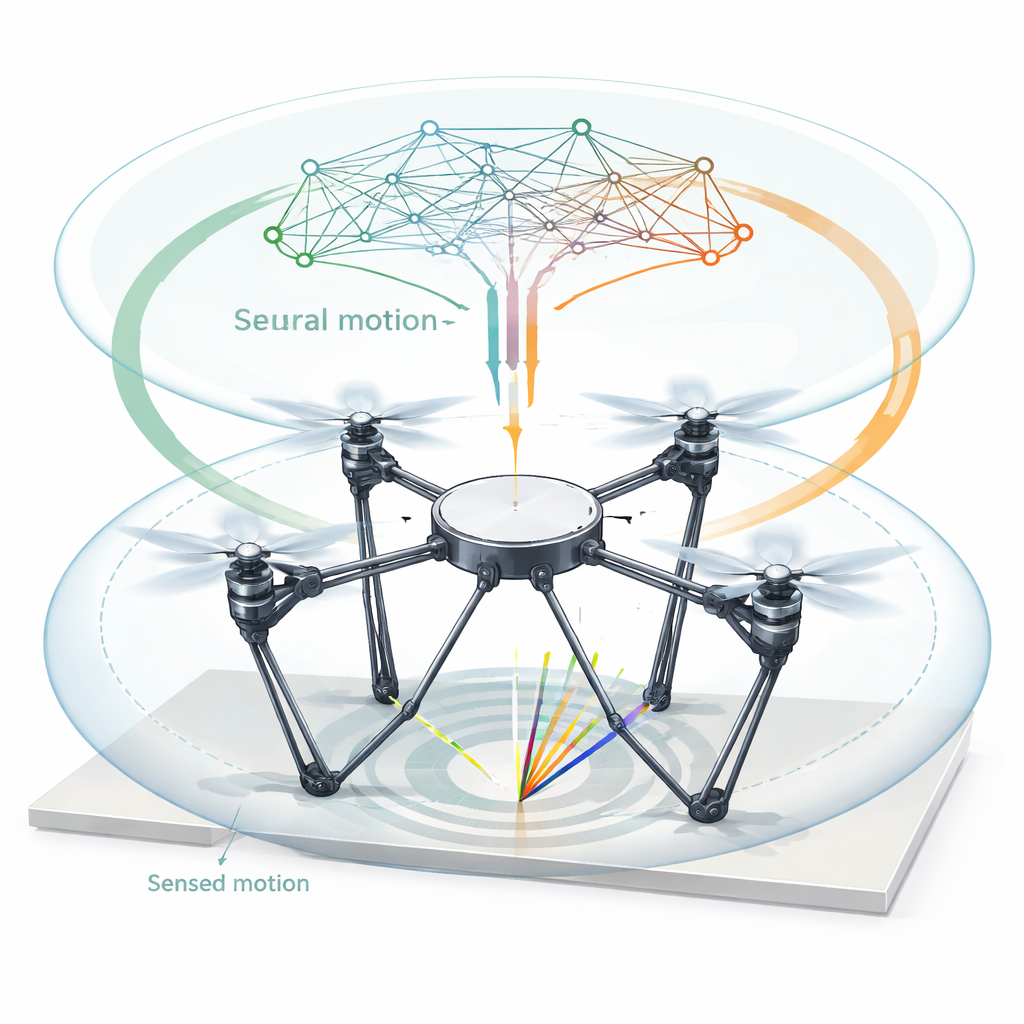
La mayoría de los robots que interactúan físicamente con su entorno usan sensores de fuerza dedicados en el punto de contacto. En una máquina voladora, sensores adicionales implican peso extra y tiempos de vuelo más cortos. Para evitar esto, los autores diseñan un “observador de esfuerzos” que estima las fuerzas y momentos de contacto observando cómo cambia el movimiento del robot en respuesta al empuje de los drones. Este observador se basa en la idea del momento generalizado: combinando la masa del robot, su movimiento y las entradas de empuje conocidas, el algoritmo reconstruye el empujón o tirón externo que actúa sobre la plataforma. Un filtro pasa‑bajo integrado suaviza el ruido de las medidas para que las fuerzas estimadas sigan siendo fiables incluso cuando los datos de movimiento son imperfectos.
Enseñar a un robot volador a ceder como un resorte
Para mantener las interacciones suaves y predecibles, el equipo usa un enfoque llamado control por impedancia, que hace que el robot se comporte como si estuviera conectado al entorno mediante un sistema masa‑muelle‑amortiguador ajustable. En lugar de intentar mantener su posición de forma rígida, la plataforma puede “ceder” frente al contacto, similar a una suspensión bien afinada. Diseñar ese comportamiento es difícil cuando las verdaderas dinámicas del robot solo se conocen de forma aproximada y los drones pueden alcanzar fácilmente los límites de empuje. Los autores abordan esto incorporando un sistema de aprendizaje basado en redes neuronales de funciones de base radial. Estas redes aproximan continuamente efectos desconocidos como la aerodinámica no modelada y cambios de carga, y una ley adaptativa derivada de la teoría de estabilidad de Lyapunov garantiza que el proceso de aprendizaje no desestabilice al robot.
Mantener la estabilidad cuando los motores alcanzan sus límites
Un riesgo práctico clave es la saturación de actuadores: cada rotor solo puede empujar hasta cierto punto. Si el controlador demanda más empuje del que los motores pueden proporcionar, la discrepancia puede causar grandes errores de seguimiento o incluso pérdida de control. En lugar de transformar todas las variables a un complicado nuevo sistema de coordenadas, los autores introducen un sistema dinámico auxiliar que compensa específicamente la diferencia entre el esfuerzo ordenado y el empuje que realmente es alcanzable. Este lazo adicional trabaja junto con el controlador de impedancia y las redes neuronales para mantener el comportamiento global estable, incluso cuando los motores operan en sus límites.
Poniendo a prueba el nuevo método de control
Los investigadores evalúan su método usando un prototipo virtual detallado del robot paralelo volador construido en un entorno de simulación mecánica y vinculado en tiempo real a un modelo de control. Somete el sistema a ruido de medición, cambios de carga y límites estrictos de empuje para reproducir condiciones del mundo real. El nuevo controlador se compara con dos alternativas: un controlador proporcional‑derivativo estándar y un controlador de impedancia más simple que también usa fuerzas estimadas pero carece de aprendizaje neuronal y compensación de saturación. Tanto en el seguimiento de trayectorias en vuelo libre como en tareas de contacto contra una superficie virtual, el método propuesto ofrece los menores errores de posición y orientación, la regulación de fuerza más precisa y el comportamiento más estable, todo ello manteniendo las órdenes a los motores dentro de límites seguros.
Por qué esto importa para los trabajadores voladores del futuro
En términos cotidianos, el trabajo muestra cómo un equipo de drones puede coordinarse para actuar como una única mano robótica aérea, potente y sorprendentemente delicada. Al estimar fuerzas sin sensores adicionales, aprender dinámicas inciertas en tiempo real y respetar los límites físicos de los motores, el esquema de control propuesto permite que el robot paralelo volador toque y manipule su entorno de forma segura y fiable. Esta combinación de fuerza, adaptabilidad y cumplimiento es un paso hacia robots aéreos que puedan realizar tareas prácticas de mantenimiento y ensamblaje en lugares difíciles o peligrosos para los humanos.
Cita: Zhu, M., Guo, Y., Gong, D. et al. Force sensorless interaction wrench estimation for neural-learning impedance control of a flying parallel robot with actuator saturation. Sci Rep 16, 12605 (2026). https://doi.org/10.1038/s41598-026-42788-2
Palabras clave: robots aéreos, cooperación multi-dron, control de fuerzas, control mediante redes neuronales, interacción física