Clear Sky Science · ru
Оценка момента взаимодействия без датчиков силы для нейрообучаемого импедансного управления летающим параллельным роботом с насыщением приводов
Роботы‑помощники, которые могут безопасно касаться мира
Воздушные роботы, которые не только летают, но и могут толкать, тянуть или вращать предметы, однажды могли бы инспектировать мосты, ремонтировать линии электропередачи или собирать конструкции в труднодоступных местах. Однако сделать летающие машины достаточно мощными, точными и безопасными для физического контакта с окружением крайне сложно. В этой работе представлен новый метод управления для специального типа многоагентного робота, который способен нести более тяжёлые грузы и мягко взаимодействовать с окружением без громоздких датчиков силы и в пределах мощности его двигателей.
Летающая команда, работающая как единый мощный робот
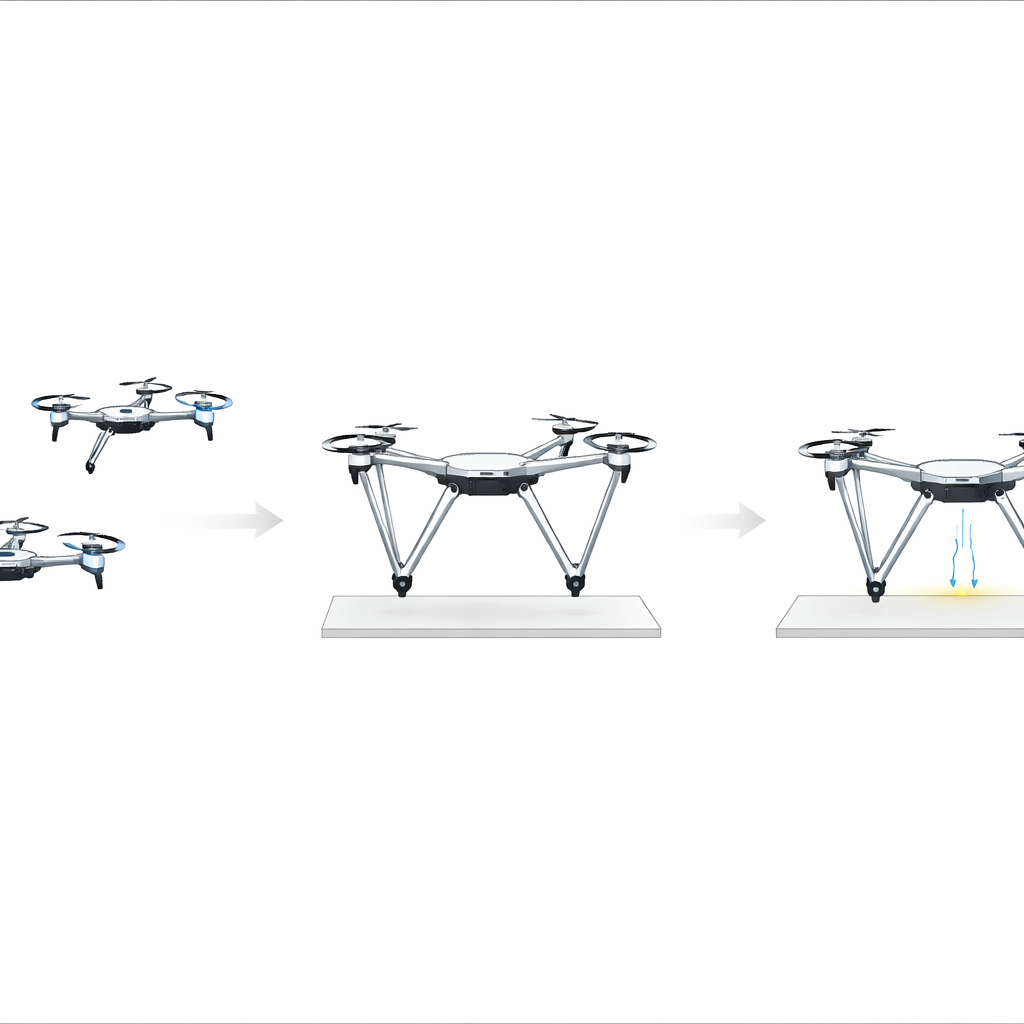
Вместо того чтобы монтировать маленькую манипуляционную руку на одном дроне, исследователи изучают «летающий параллельный робот», собранный из трёх квадрокоптеров, соединённых жёсткими штангами с центральной подвижной платформой. Работая вместе, дроны могут поддерживать большие полезные нагрузки и прикладывать силы более равномерно, чем одиночный аппарат. В то же время такая компоновка влечёт серьёзные сложности: силы, которые может развить каждый дрон, строго ограничены, общая динамика движения сложна, и система должна оставаться устойчивой при порывах ветра и при взаимодействии с поверхностями, такими как стены или потолки.
Чувствовать силы без тяжёлых датчиков
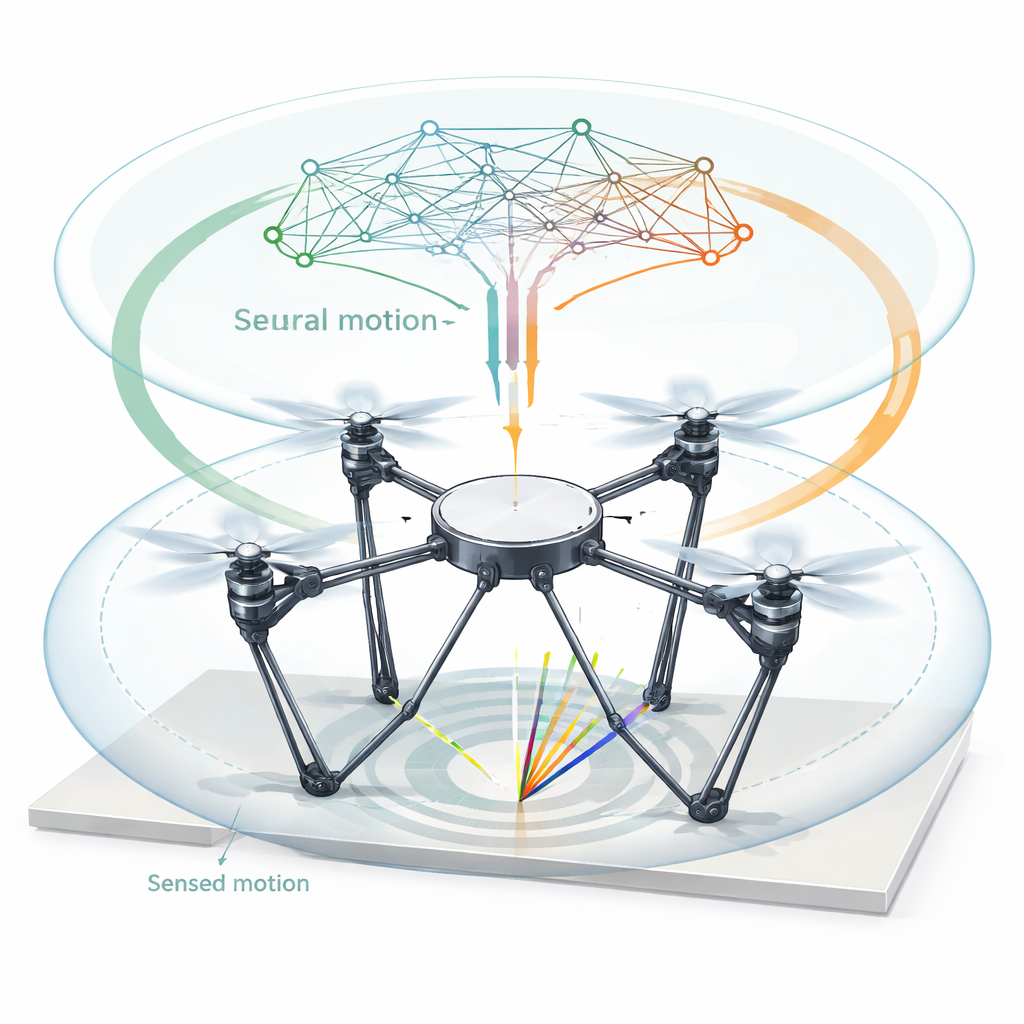
Большинство роботов, взаимодействующих физически с окружением, используют специализированные датчики силы в точке контакта. На летающем аппарате дополнительные датчики означают лишний вес и сокращение времени полёта. Чтобы этого избежать, авторы разрабатывают «наблюдатель силы/момента» (wrench observer), который оценивает контактные силы и моменты, отслеживая, как меняется движение робота в ответ на тягу дронов. Этот наблюдатель основан на представлении об обобщённом импульсе: комбинируя массу робота, его движение и известные управляющие тяги, алгоритм восстанавливает внешнее воздействие на платформу. Встроенный фильтр низких частот сглаживает измерительный шум, так что оценённые силы остаются надёжными даже при несовершенных данных о движении.
Обучить летающего робота вести себя как пружина
Чтобы взаимодействия были мягкими и предсказуемыми, команда использует подход, называемый импедансным управлением, который заставляет робота вести себя как система масс‑пружина‑демпфер с настраиваемыми параметрами. Вместо того чтобы жёстко удерживать позицию, платформа может «уступать» при контакте, подобно хорошо настроенной подвеске. Спроектировать такое поведение трудно, когда истинная динамика робота известна лишь приближённо, а дроны легко достигают пределов своей тяги. Авторы решают эту проблему, внедряя обучающую систему на основе нейронных сетей с радиальными базисными функциями. Эти сети непрерывно аппроксимируют неизвестные эффекты, такие как немоделируемая аэродинамика и изменяющаяся полезная нагрузка, а адаптивный закон, выведённый из теории устойчивости Ляпунова, обеспечивает, что процесс обучения не дестабилизирует систему.
Оставаться устойчивым, когда моторы достигают пределов
Ключевой практической проблемой является насыщение приводов: каждый ротор может развивать лишь ограниченную тягу. Если контроллер требует большего усилия, чем моторы способны выдать, несоответствие может вызвать большие ошибки слежения или даже потерю управления. Вместо того чтобы перекраивать все переменные в сложную новую систему координат, авторы вводят вспомогательную динамическую систему, которая специально компенсирует разницу между командируемым моментом/силой и фактически достижимой тягой. Эта дополнительная петля работает совместно с импедансным контроллером и нейросетями, сохраняя общую устойчивость поведения даже когда двигатели работают на пределе.
Испытание нового метода управления
Исследователи оценивают свой подход с помощью детализированного виртуального прототипа летающего параллельного робота, созданного в среде механического моделирования и связанного в реальном времени с моделью управления. Они подвергают систему измерительному шуму, изменениям полезной нагрузки и строгим ограничениям по тяге, чтобы отразить реальные условия. Новый контроллер сравнивают с двумя альтернативами: стандартным пропорционально‑дифференциальным контроллером и более простым импедансным контроллером, который также использует оценённые силы, но лишён нейронного обучения и компенсации насыщения. В обоих режимах — слежения за траекторией в свободном полёте и задачах контакта с виртуальной поверхностью — предложенный метод показывает наименьшие ошибки положения и ориентации, наиболее точное регулирование силы и наиболее устойчивое поведение, при этом команды моторам остаются в безопасных пределах.
Почему это важно для будущих летающих рабочих
Проще говоря, работа демонстрирует, как команда дронов может быть скоординирована так, чтобы действовать как единая, мощная и удивительно деликатная рука в воздухе. Оценивая силы без дополнительных датчиков, обучаясь неопределённой динамике во время работы и учитывая физические ограничения моторов, предложенная схема управления позволяет летающему параллельному роботу безопасно и надёжно касаться и манипулировать окружением. Такое сочетание силы, адаптивности и податливости — шаг к воздушным роботам, способным выполнять практические задачи по обслуживанию и сборке в местах, труднодоступных или опасных для человека.
Цитирование: Zhu, M., Guo, Y., Gong, D. et al. Force sensorless interaction wrench estimation for neural-learning impedance control of a flying parallel robot with actuator saturation. Sci Rep 16, 12605 (2026). https://doi.org/10.1038/s41598-026-42788-2
Ключевые слова: воздушные роботы, кооперация нескольких дронов, управление силой, управление нейронными сетями, физическое взаимодействие