Clear Sky Science · tr
Aktüatör doygunluğuyla bir uçan paralel robotun sinirsel öğrenimli empedans kontrolü için sensörsüz kuvvet-uzatım tahmini
Dünyaya güvenli bir şekilde dokunabilen robotik yardımcılar
Sadece uçmakla kalmayıp nesnelere itme, çekme veya döndürme uygulayabilen hava araçları bir gün köprüleri denetleyebilir, enerji hatlarını onarabilir veya ulaşılması zor yerlerde yapılar monte edebilir. Ancak uçan makineleri fiziksel olarak çevreleriyle temas edecek kadar güçlü, hassas ve güvenli yapmak son derece zordur. Bu makale, hantal kuvvet sensörlerine gerek duymadan ve motorların güç sınırları içinde kalarak daha ağır yükleri taşıyabilen ve çevreyle nazikçe etkileşime girebilen özel bir çoklu-drone robotu için yeni bir kontrol yöntemi sunar.
Bir güçlü robot gibi hareket eden uçan ekip
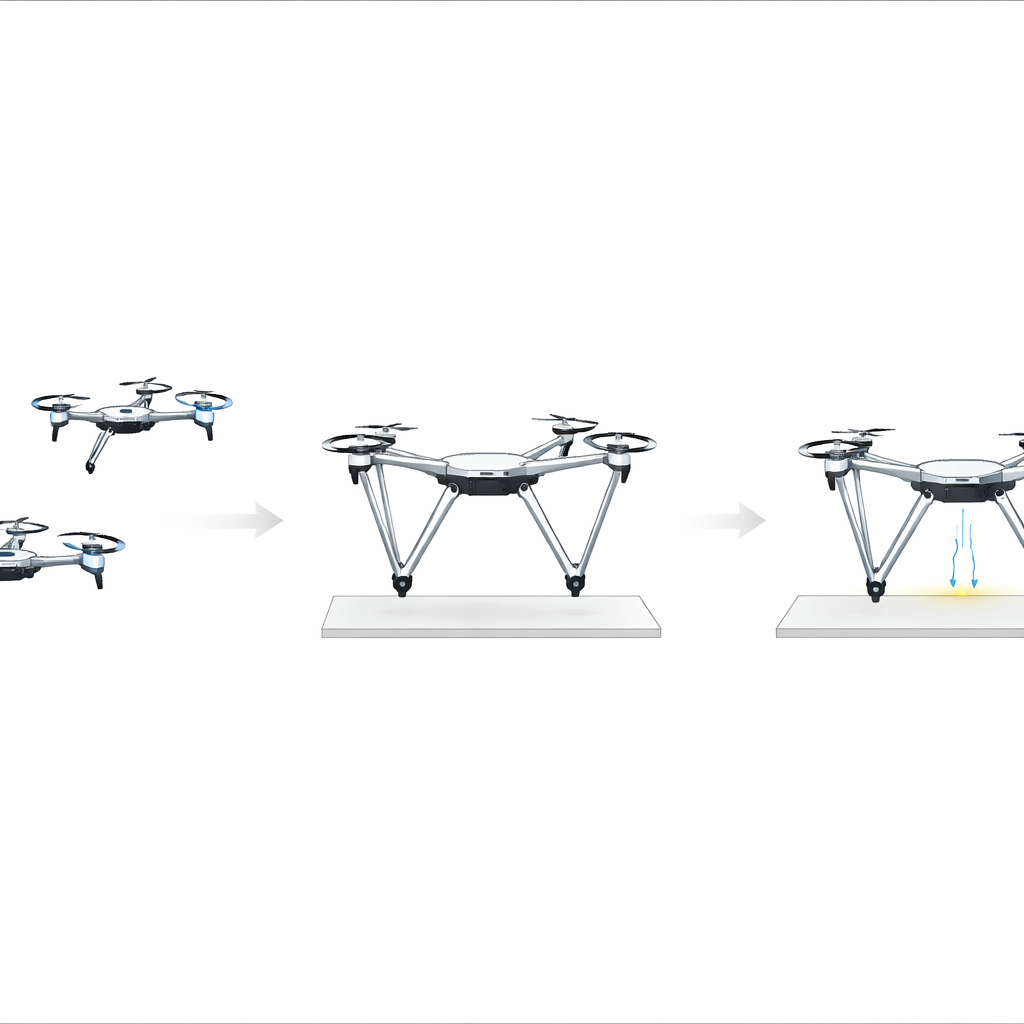
Tek bir drona küçük bir kol takmak yerine, araştırmacılar üç quadrotorun rijit bacaklarla merkezi hareketli bir platforma bağlandığı “uçan paralel robot”u inceliyor. Birlikte çalışarak dronlar daha büyük yükleri destekleyebilir ve kuvvetleri tek bir araca göre daha dengeli uygulayabilir. Ancak bu tasarım ciddi zorlukları da beraberinde getirir: her bir dronun üretebileceği kuvvetler sıkı şekilde sınırlıdır, genel hareket karmaşıktır ve robot rüzgârın etkisiyle savrulurken ya da duvar veya tavan gibi yüzeylere itme yaparken dengede kalmalıdır.
Ağır sensörler eklemeden kuvvetleri hissetmek
Çevreleriyle fiziksel etkileşime giren çoğu robot, temas noktasına yerleştirilmiş özel kuvvet sensörleri kullanır. Bir uçan makinede ekstra sensörler daha fazla ağırlık ve daha kısa uçuş süreleri demektir. Bunu önlemek için yazarlar, dronların itiş gücünden kaynaklanan hareket değişikliklerini izleyerek temas kuvvetlerini ve momentleri tahmin eden bir “uzatım gözlemcisi” tasarlıyor. Bu gözlemci, genelleştirilmiş momentum fikrine dayanır: robotun kütlesini, hareketini ve bilinen itiş girdilerini birleştirerek platforma etki eden dış itme veya çekme kuvvetini yeniden oluşturur. Dahili bir alçak geçiren filtre, ölçüm gürültüsünü yumuşatır; böylece hareket verileri mükemmel olmasa bile tahmin edilen kuvvetler güvenilir kalır.
Bir yay gibi esnemeyi öğreten uçan robot
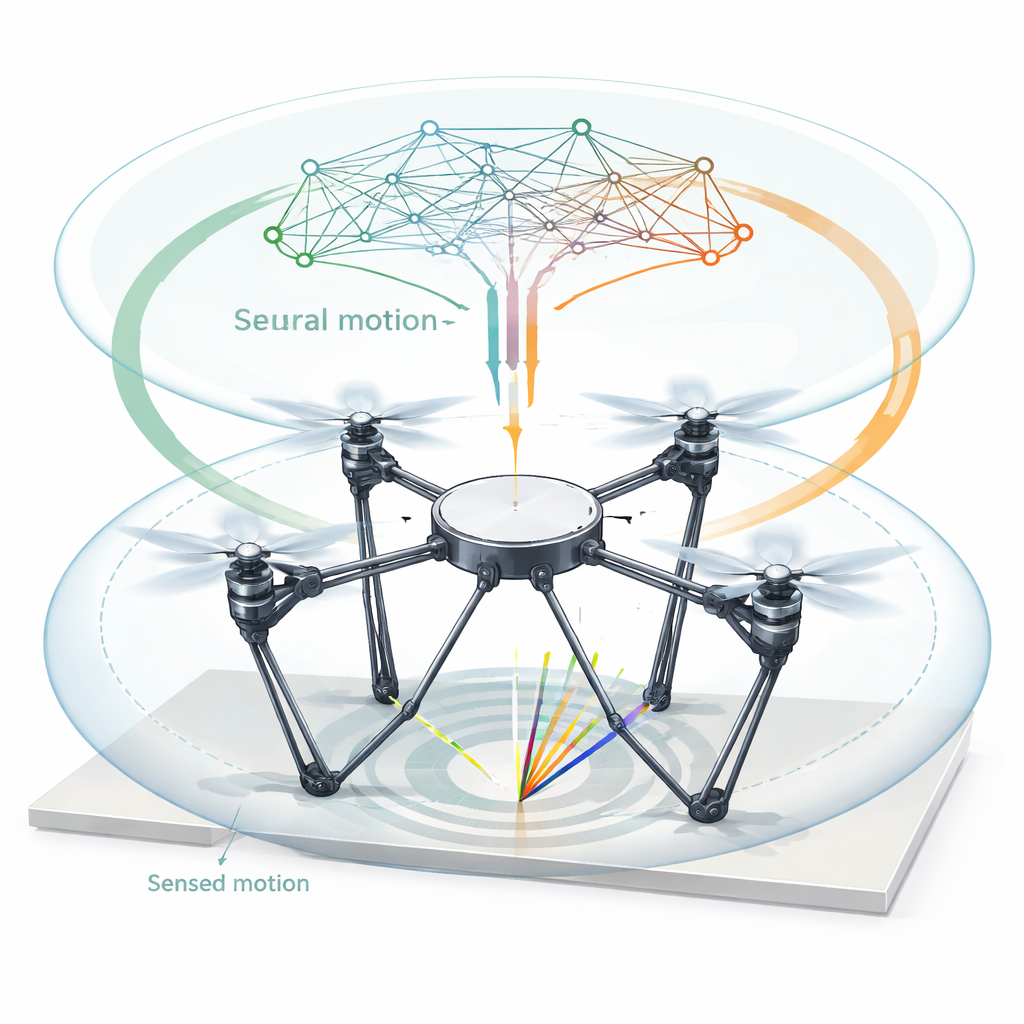
Etkileşimleri nazik ve öngörülebilir kılmak için ekip, robotu ayarlanabilir bir kütle-yay-sönümleyici sistemine bağlıymış gibi davranmasını sağlayan empedans kontrolü yaklaşımını kullanıyor. Platform konumunu katı şekilde tutmaya çalışmak yerine temasa tepki olarak “verebilir”, tıpkı iyi ayarlanmış bir süspansiyon gibi. Robotun gerçek dinamikleri yalnızca kabaca bilindiğinde ve dronların itiş sınırlarına ulaşması kolay olduğunda bu davranışı tasarlamak zordur. Yazarlar bunu, radyal tabanlı fonksiyon sinir ağlarına dayalı bir öğrenme sistemi gömerek çözüyor. Bu ağlar modellenmemiş aerodinamik etkiler ve değişen yükler gibi bilinmeyen etkileri sürekli olarak yaklaşıklar ve Lyapunov kararlılık teorisinden türetilen adaptif bir yasa, öğrenme sürecinin robotu kararsız hale getirmemesini garanti eder.
Motorlar sınırlarına ulaştığında kararlı kalmak
Temel pratik risk aktüatör doygunluğudur: her rotor yalnızca belli bir itiş uygulayabilir. Eğer kontrolcü, motorların sağlayabileceğinden daha fazla itiş talep ederse, uyumsuzluk büyük izleme hatalarına veya hatta kontrol kaybına yol açabilir. Tüm değişkenleri karmaşık yeni bir koordinat sistemine yeniden şekillendirmek yerine yazarlar, komuta edilen uzatım ile gerçekte ulaşılabilir itiş arasındaki farkı özel olarak telafi eden yardımcı bir dinamik sistem tanıtıyor. Bu ek döngü, empedans kontrolcüsü ve sinir ağlarıyla birlikte çalışarak motorlar sınırlarında çalışırken bile genel davranışı kararlı tutar.
Yeni kontrol yöntemini teste sokmak
Araştırmacılar yaklaşımlarını, mekanik bir simülasyon ortamında inşa edilmiş ve gerçek zamanlı olarak bir kontrol modeliyle bağlı uçan paralel robotun ayrıntılı sanal prototipi kullanarak değerlendiriyor. Sistemi ölçüm gürültüsüne, yük değişimlerine ve sıkı itiş sınırlarına maruz bırakarak gerçek dünya koşullarını yansıtıyorlar. Yeni kontrolcü, standart bir oransal-türevsel kontrolcü ve tahmin edilen kuvvetleri kullanan ancak sinirsel öğrenme ve doygunluk telafisi olmayan daha basit bir empedans kontrolcü olmak üzere iki alternatife karşı karşılaştırılıyor. Hem serbest uçuş yol takibi hem de sanal bir yüzeye karşı temas görevlerinde önerilen yöntem en küçük pozisyon ve yön hatalarını, en doğru kuvvet düzenlemesini ve en kararlı davranışı sunuyor; tüm bunlar motor komutlarını güvenli sınırlar içinde tutarken gerçekleşiyor.
Geleceğin uçan işçileri için bunun önemi
Günlük terimlerle bu çalışma, bir grup dronun havada tek, güçlü ve şaşırtıcı derecede nazik bir robotik el gibi koordine edilebileceğini gösteriyor. Ek sensörler olmadan kuvvetleri tahmin ederek, uçuş sırasında belirsiz dinamikleri öğrenerek ve motorların fiziksel sınırlarına saygı göstererek önerilen kontrol düzeni, uçan paralel robotun çevresine güvenli ve güvenilir bir şekilde dokunmasını ve manipüle etmesini sağlıyor. Güç, uyarlanabilirlik ve uyumun bu birleşimi, insanların ulaşmasının zor veya tehlikeli olduğu yerlerde pratik bakım ve montaj görevlerini yerine getirebilecek hava robotlarına doğru atılmış bir adımdır.
Atıf: Zhu, M., Guo, Y., Gong, D. et al. Force sensorless interaction wrench estimation for neural-learning impedance control of a flying parallel robot with actuator saturation. Sci Rep 16, 12605 (2026). https://doi.org/10.1038/s41598-026-42788-2
Anahtar kelimeler: hava aracı robotlar, çoklu drone işbirliği, kuvvet kontrolü, yapay sinir ağı kontrolü, fiziksel etkileşim