Clear Sky Science · he
אומדן מאמץ אינטראקציה ללא חיישני כוח לבקרת אימפדנס בלמידת-עצבים של רובוט מעופף מקבילי עם רוויה של מפעילים
עוזרים רובוטיים שיכולים לגעת בעולם בבטחה
רחפניים שיכולים לא רק לעוף אלא גם לדחוף, למשוך או לסובב חפצים עשויים בעתיד לבדוק גשרים, לתקן קווי מתח או להרכיב מבנים במקומות שקשה להגיע אליהם. עם זאת, להפוך מכונות מעופפות לחזקות, מדויקות ובטוחות מספיק כדי לגעת פיזית בסביבה זה אתגר גדול מאוד. מאמר זה מציע שיטת בקרה חדשה עבור סוג מיוחד של רובוט רב-רחפני שיכול לשאת מטענים כבדים יותר ולהתקשר בעדינות עם הסביבה, בלי צורך בחיישני כוח громozuksים ובתנאי שהמנועים נשארים בתוך גבולות ההספק שלהם.
צוות מעופף הפועל כרובוט חזק אחד
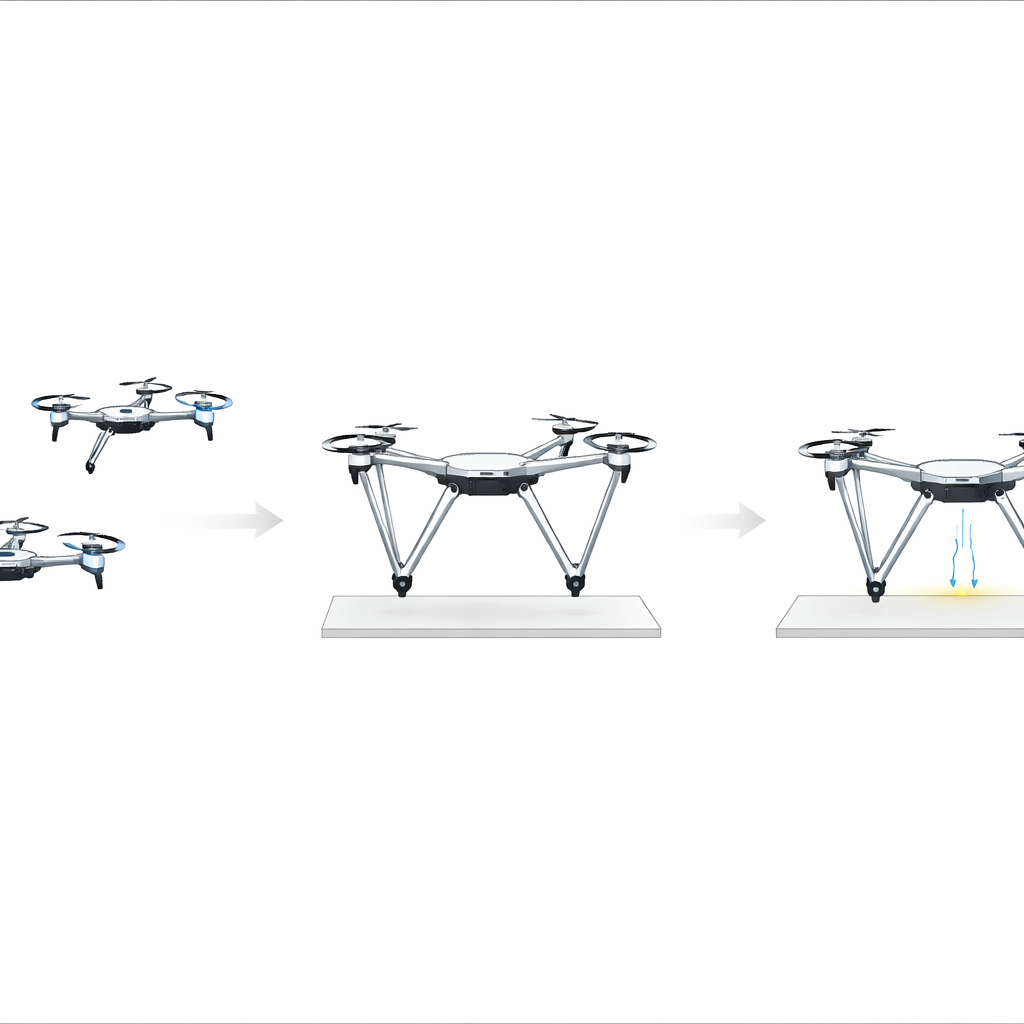
במקום להרכיב זרוע קטנה על רחפן יחיד, החוקרים בחנו "רובוט מקבילי מעופף" הבנוי משלושה רב-סילוניים המחוברים ברגליים קשיחות לפלטפורמה נעה מרכזית. בעבודה משותפת יכולים הרחפנים לתמוך במטענים גדולים יותר ולהפעיל כוחות באופן אחיד יותר מאשר כלי בודד. עם זאת, תצורה זו מביאה גם אתגרים משמעותיים: הכוחות שכל רחפן יכול לייצר מוגבלים במידה נוקשה, התנועה הכוללת מורכבת והרובוט צריך להישאר יציב בזמן שהוא נחשף לרוחות או לדחיפות כנגד משטחים כמו קירות או תקרות.
להרגיש כוחות בלי להוסיף חיישנים כבדים
רוב הרובוטים שמתקשרים פיזית עם סביבתם משתמשים בחיישני כוח ייעודיים בנקודת המגע. ברכיב מעופף, חיישנים נוספים משמעותם משקל נוסף וזמני טיסה קצרים יותר. כדי להימנע מכך, המחברים מעצבים "תצפיתן מאמץ" שמעריך את כוחות ומומנטים המגע על ידי צפייה בשינויים בתנועת הרובוט בתגובה לדחף מהרחפנים. תצפיתן זה מבוסס על רעיון של מומנטום כללי: על ידי שילוב מסת הרובוט, התנועה וקלטי הדחף הידועים, האלגוריתם משחזר את הדחיפה או המשיכה החיצונית הפועלת על הפלטפורמה. מסנן ממוצע-נמוך מובנה מיישר רעשי מדידה כך שכוחות מוערכים נשארים אמינים גם כאשר נתוני התנועה אינם מושלמים.
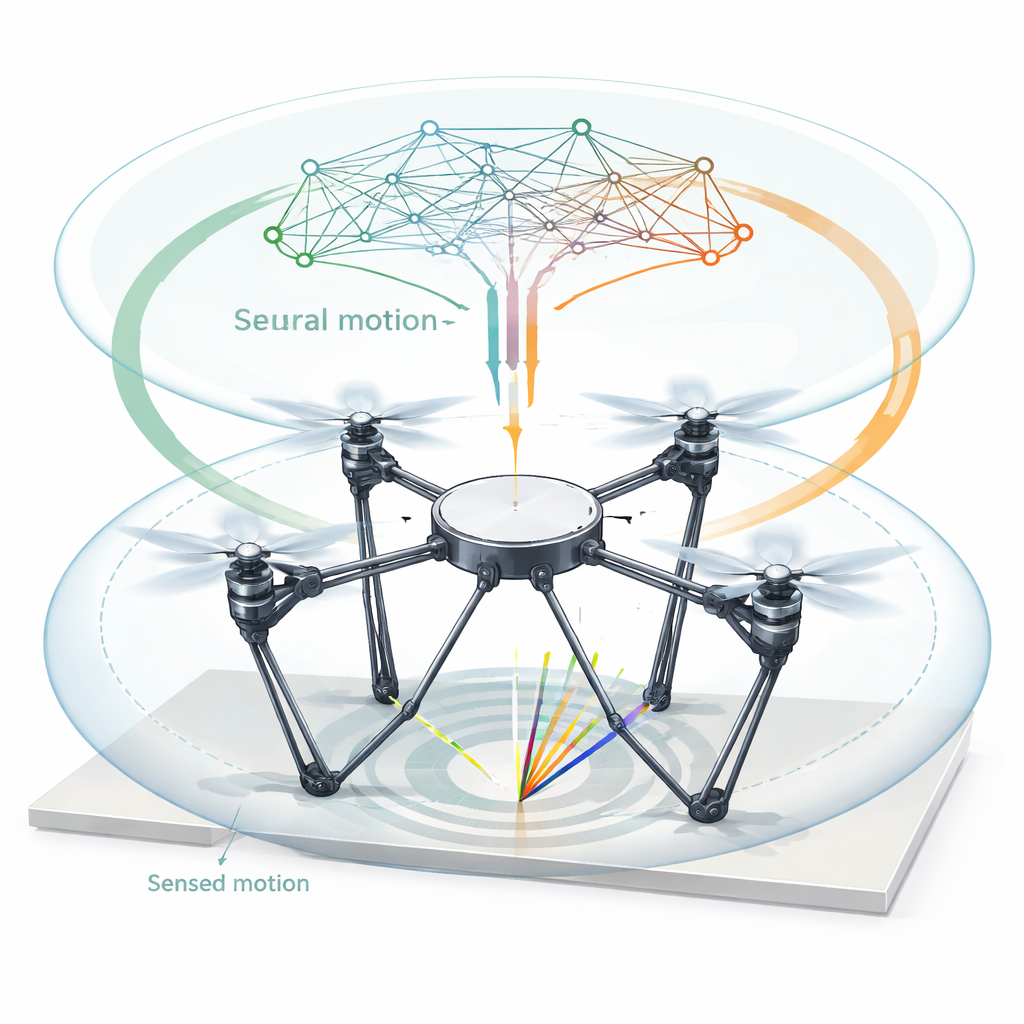
ללמד רובוט מעופף להיענות כמו קפיץ
כדי לשמור על אינטראקציות עדינות ונתתחזיותיות, הקבוצה משתמשת בגישה הנקראת בקרת אימפדנס, אשר גורמת לרובוט להתנהג כאילו הוא מחובר לסביבה דרך מערכת מסת-קפיץ-מהמעכך מתכווננת. במקום לנסות לשמור על מיקום קשיח, הפלטפורמה יכולה "להישתחרר" בתגובה למגע, בדומה למתלים מכוילים היטב. עיצוב התנהגות כזו הוא קשה כאשר הדינמיקה האמיתית של הרובוט ידועה בקירוב בלבד והרחפנים עלולים בקלות להגיע למגבלות הדחף שלהם. המחברים מתמודדים עם זה על ידי הטמעת מערכת למידה המבוססת על רשתות עצביות מבוססות פונקציות בסיס רדיאליות. רשתות אלה מקרבות ברצף השפעות לא ידועות כגון אירודינמיקה לא ממודלת ושינויים במטען, וחוק אדפטיבי הנגזר מתורת היציבות של ליונאוב מבטיח שהתהליך הלימודי לא יגרום לאיחוי היציבות של הרובוט.
להישאר יציבים כשהמנועים נתקלים בגבולותיהם
סיכון מעשי מרכזי הוא רוויה של המפעילים: לכל רוטור יש גבול כמה הוא יכול לדחוף. אם הבקר דורש יותר דחף משהמנועים יכולים לספק, אי-ההתאמה יכולה לגרום לשגיאות עקיבה גדולות או אפילו לאובדן שליטה. במקום לעצב מחדש את כל המשתנים למערכת קואורדינטות חדשה ומורכבת, המחברים מציגים מערכת דינמית עזר שמפצה במפורש על ההפרש בין המאמצת הנדרשת לבין הדחף שניתן להפיק בפועל. לולאה נוספת זו פועלת יחד עם בקרת האימפדנס והרשתות העצביות כדי לשמור על התנהגות יציבה של המערכת כולה, גם כאשר המנועים פועלים בקצה היכולות שלהם.
מבחן השיטה החדשה
החוקרים מעריכים את הגישה שלהם באמצעות אב-טיפוס וירטואלי מפורט של הרובוט המקבילי המעופף שנבנה בסביבת סימולציה מכאנית ומקושר בזמן אמת למודל בקרה. הם חשפו את המערכת לרעשי מדידה, שינויים במטען ומגבלות דחף קפדניות כדי לשחזר תנאי העולם האמיתי. הבקר החדש הושווה מול שתי חלופות: בוקר פרופורציונלי-נגדי סטנדרטי ובקר אימפדנס פשוט יותר שגם משתמש בכוחות מוערכים אך חסר למידה עצבית ופיצוי לרוויה. הן במעקב מסלולים בטיסה חופשית והן במשימות מגע מול משטח וירטואלי, השיטה המוצעת מניבה את שגיאות המיקום והכיוון הקטנות ביותר, ויסות הכוח המדויק ביותר וההתנהגות היציבה ביותר, וכל זאת תוך שמירה על פקודות מנוע בתוך גבולות בטוחים.
למה זה חשוב לעובדי אוויר בעתיד
במונחים יומיומיים, העבודה מדגימה כיצד צוות רחפנים יכול להיות מתואם לפעול כמו יד רובוטית אחת, חזקה ועדינה באופן מפתיע באוויר. על ידי הערכת כוחות ללא חיישנים נוספים, למידת דינמיקות לא ודאיות בזמן אמת וכיבוד גבולות הפיזיקה של המנועים, סכימת הבקרה המוצעת מאפשרת לרובוט המקבילי המעופף לגעת ולמניפול את הסביבה שלו באופן בטוח ואמין. השילוב הזה של כוח, התאמה וכניעות מהווה צעד לקראת רחפניים שיוכלו לבצע תחזוקה והרכבה מעשית במקומות שקשים או מסוכנים להגעה עבור בני אדם.
ציטוט: Zhu, M., Guo, Y., Gong, D. et al. Force sensorless interaction wrench estimation for neural-learning impedance control of a flying parallel robot with actuator saturation. Sci Rep 16, 12605 (2026). https://doi.org/10.1038/s41598-026-42788-2
מילות מפתח: רחפניים, שיתוף פעולה של כמה רחפנים, בקרת כוח, בקרת רשת עצבית, אינטראקציה פיזית