Clear Sky Science · de
Kraftsensorlose Abschätzung der Interaktionskraft für neuronales Lern-Impedanzregelung eines fliegenden Paralleroboters mit Aktuatorsättigung
Robotische Helfer, die die Welt sicher berühren können
Luftroboter, die nicht nur fliegen, sondern auch Objekte schieben, ziehen oder drehen können, könnten eines Tages Brücken inspizieren, Stromleitungen reparieren oder Strukturen an schwer zugänglichen Orten montieren. Es ist jedoch äußerst schwierig, Flugmaschinen so stark, präzise und sicher zu machen, dass sie ihre Umgebung körperlich berühren können. In diesem Artikel wird eine neue Regelungsmethode für eine spezielle Art von Multi‑Drohnen‑Roboter vorgestellt, die schwerere Lasten tragen und sanft mit der Umgebung interagieren kann, ohne sperrige Kraftsensoren zu benötigen und dabei innerhalb der Leistungsgrenzen ihrer Motoren zu bleiben.
Ein fliegendes Team, das als ein starker Roboter agiert
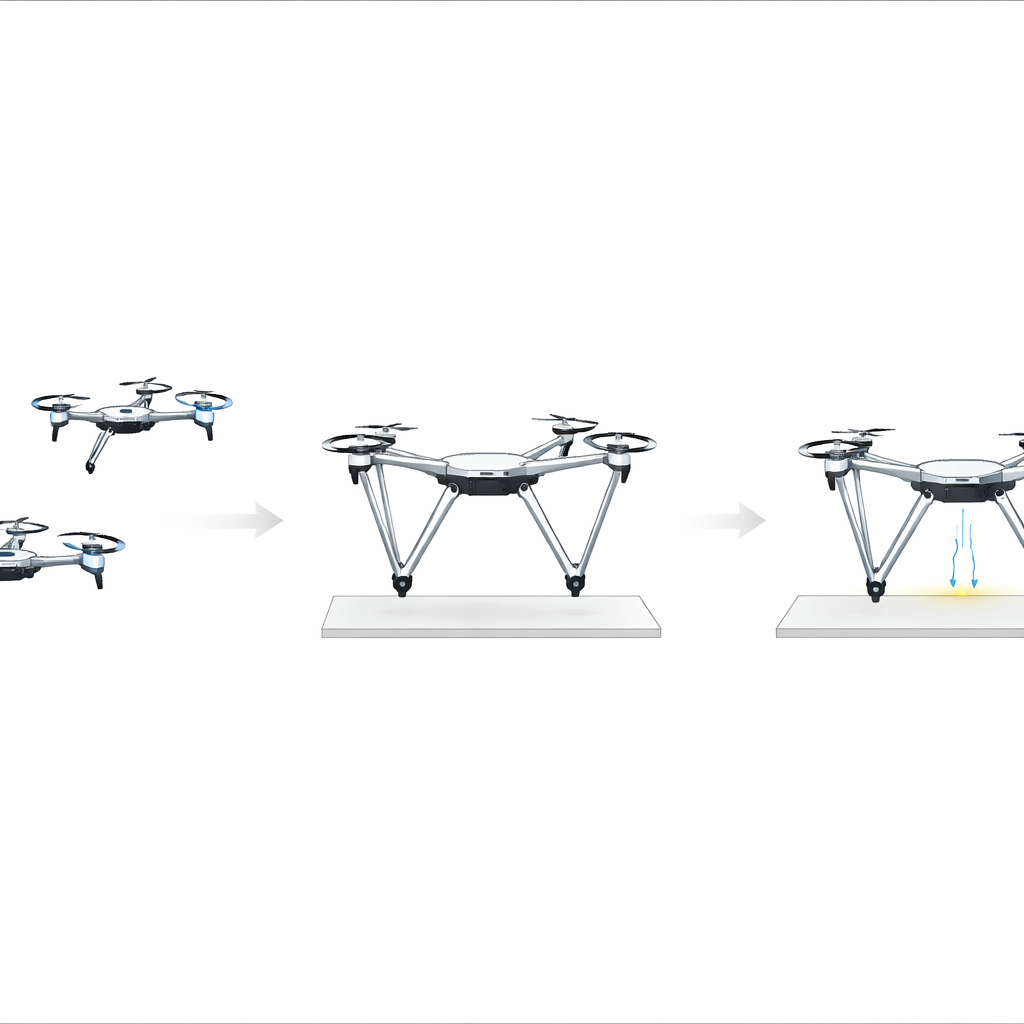
Anstatt einen kleinen Arm an einer einzelnen Drohne zu montieren, untersuchen die Forscher einen „fliegenden Paralleroboter“, der aus drei Quadrotoren besteht, die über starre Beine mit einer zentralen beweglichen Plattform verbunden sind. Indem sie zusammenarbeiten, können die Drohnen größere Nutzlasten tragen und Kräfte gleichmäßiger aufbringen als ein einzelnes Fahrzeug. Dieses Design bringt jedoch auch erhebliche Herausforderungen mit sich: Die von jeder Drohne erzeugbaren Kräfte sind streng begrenzt, die Gesamtbewegung ist komplex, und der Roboter muss stabil bleiben, während Windböen auf ihn einwirken und er gegen Oberflächen wie Wände oder Decken drückt.
Kräfte spüren, ohne schwere Sensoren hinzuzufügen
Die meisten Roboter, die physisch mit ihrer Umgebung interagieren, verwenden dedizierte Kraftsensoren am Kontaktpunkt. Bei einem Fluggerät bedeuten zusätzliche Sensoren jedoch zusätzliches Gewicht und kürzere Flugzeiten. Um dies zu vermeiden, entwerfen die Autoren einen „Wrench‑Beobachter“, der Kontaktkräfte und -momente abschätzt, indem er beobachtet, wie sich die Bewegung des Roboters als Reaktion auf den Schub der Drohnen verändert. Dieser Beobachter basiert auf dem Konzept des generalisierten Impulses: Durch die Kombination der Masse des Roboters, seiner Bewegung und der bekannten Schubeingänge rekonstruiert der Algorithmus die extern wirkende Zug‑ oder Schubkraft auf die Plattform. Ein eingebauter Tiefpassfilter glättet Messrauschen, sodass die geschätzten Kräfte zuverlässig bleiben, selbst wenn die Bewegungsdaten unvollkommen sind.
Dem fliegenden Roboter beibringen, sich wie eine Feder nachzugeben
Um Interaktionen sanft und vorhersehbar zu halten, verwendet das Team einen Ansatz namens Impedanzregelung, der den Roboter so verhalten lässt, als sei er über ein einstellbares Masse‑Feder‑Dämpfer‑System mit der Umgebung verbunden. Anstatt seine Position starr zu halten, kann die Plattform bei Kontakt „nachgeben“, ähnlich wie eine gut abgestimmte Federung. Ein solches Verhalten zu entwerfen ist schwierig, wenn die tatsächlichen Dynamiken des Roboters nur grob bekannt sind und die Drohnen leicht ihre Schubgrenzen erreichen können. Die Autoren begegnen diesem Problem, indem sie ein Lernsystem auf Basis radialer Basisfunktions‑Neuronaler Netze einbetten. Diese Netze approximieren kontinuierlich unbekannte Effekte wie nicht modellierte Aerodynamik und wechselnde Nutzlasten, und eine adaptive Regelung, die aus der Lyapunov‑Stabilitätstheorie abgeleitet ist, stellt sicher, dass der Lernprozess den Roboter nicht destabilisiert.
Stabil bleiben, wenn die Motoren ihre Grenzen erreichen
Ein zentrales praktisches Risiko ist die Aktuatorsättigung: Jeder Rotor kann nur begrenzt Schub liefern. Wenn der Regler mehr Schub verlangt, als die Motoren bereitstellen können, kann die Diskrepanz zu großen Trackingfehlern oder sogar Kontrollverlust führen. Anstatt alle Variablen in ein kompliziertes neues Koordinatensystem umzuwandeln, führen die Autoren ein zusätzliches dynamisches System ein, das speziell den Unterschied zwischen dem befohlenen Wrench und dem tatsächlich erreichbaren Schub kompensiert. Diese zusätzliche Schleife arbeitet zusammen mit dem Impedanzregler und den neuronalen Netzen, um das Gesamtverhalten stabil zu halten, selbst wenn die Motoren an ihren Grenzen betrieben werden.
Erprobung der neuen Regelungsmethode
Die Forscher bewerten ihren Ansatz anhand eines detaillierten virtuellen Prototyps des fliegenden Paralleroboters, der in einer mechanischen Simulationsumgebung erstellt und in Echtzeit mit einem Regelungsmodell verknüpft wurde. Sie setzen das System Messrauschen, Nutzlastwechseln und strengen Schubgrenzen aus, um realweltliche Bedingungen nachzubilden. Der neue Regler wird mit zwei Alternativen verglichen: einem standardmäßigen proportional‑differenziellen Regler und einem einfacheren Impedanzregler, der ebenfalls geschätzte Kräfte nutzt, aber weder neuronales Lernen noch Sättigungskompensation besitzt. Sowohl bei der Trajektorienverfolgung in freiem Flug als auch bei Kontaktaufgaben gegen eine virtuelle Oberfläche liefert die vorgeschlagene Methode die geringsten Positions‑ und Orientierungsfehler, die genaueste Kraftregelung und das stabilste Verhalten, und das bei Motorbefehlen innerhalb sicherer Grenzen.
Warum das für zukünftige fliegende Arbeiter wichtig ist
Alltagssprachlich zeigt die Arbeit, wie ein Team von Drohnen koordiniert werden kann, um wie eine einzelne, kraftvolle und überraschend sanfte Roboterhand in der Luft zu agieren. Indem Kräfte ohne zusätzliche Sensoren geschätzt, unsichere Dynamiken während des Flugs gelernt und die physikalischen Grenzen der Motoren respektiert werden, erlaubt das vorgeschlagene Regelungsschema dem fliegenden Paralleroboter, seine Umgebung sicher und zuverlässig zu berühren und zu manipulieren. Diese Kombination aus Kraft, Anpassungsfähigkeit und Nachgiebigkeit ist ein Schritt hin zu Luftrobotern, die praktische Wartungs‑ und Montageaufgaben an Orten ausführen können, die für Menschen schwer oder gefährlich zu erreichen sind.
Zitation: Zhu, M., Guo, Y., Gong, D. et al. Force sensorless interaction wrench estimation for neural-learning impedance control of a flying parallel robot with actuator saturation. Sci Rep 16, 12605 (2026). https://doi.org/10.1038/s41598-026-42788-2
Schlüsselwörter: Luftroboter, Kooperation mehrerer Drohnen, Kraftregelung, Neuronale Netzregelung, physische Interaktion