Clear Sky Science · en
Force sensorless interaction wrench estimation for neural-learning impedance control of a flying parallel robot with actuator saturation
Robotic helpers that can safely touch the world
Aerial robots that can not only fly but also push, pull, or twist objects could one day inspect bridges, repair power lines, or assemble structures in hard-to-reach places. Yet making flying machines strong, precise, and safe enough to physically touch their surroundings is extremely difficult. This paper introduces a new control method for a special kind of multi-drone robot that can carry heavier loads and interact gently with the environment, without needing bulky force sensors and while staying within the power limits of its motors.
A flying team acting as one strong robot
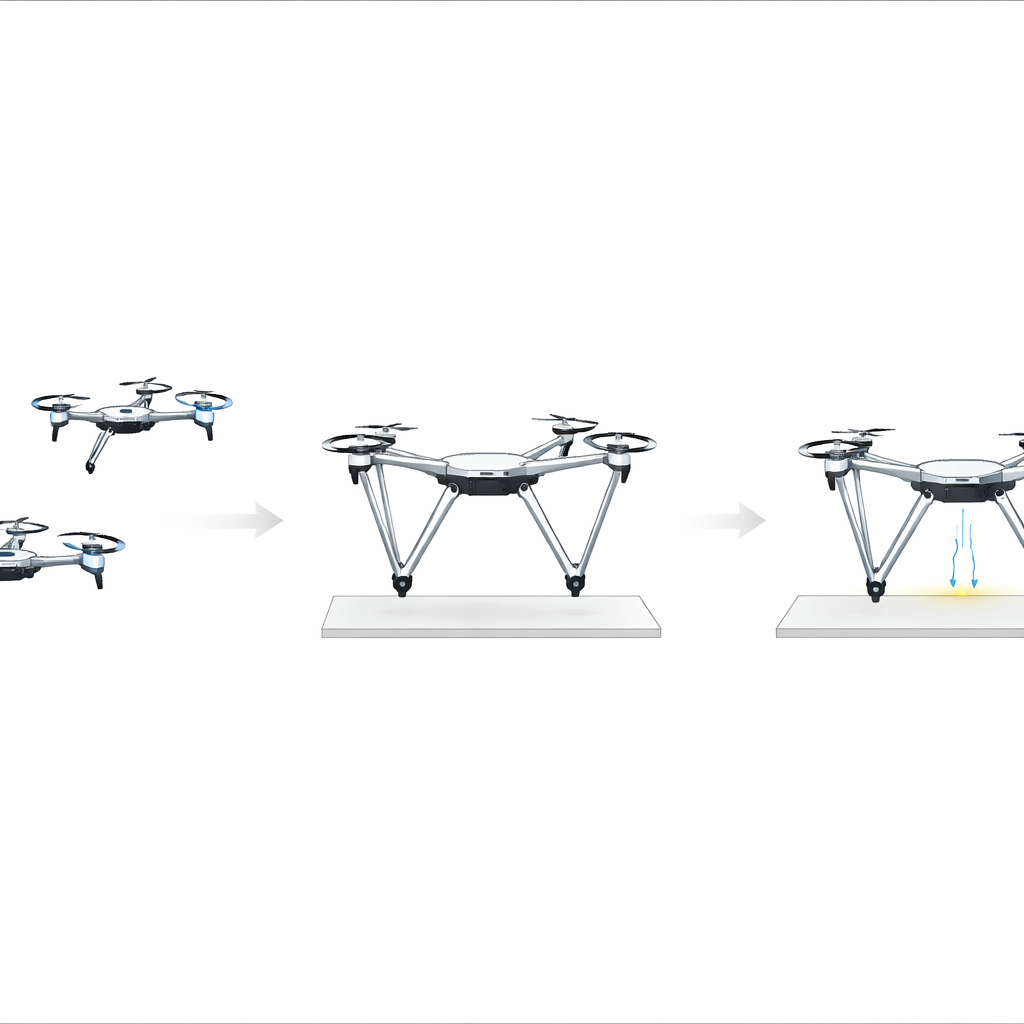
Instead of mounting a small arm on a single drone, the researchers study a “flying parallel robot” built from three quadrotors connected by rigid legs to a central moving platform. Working together, the drones can support larger payloads and apply forces more evenly than a single vehicle. However, this design also brings serious challenges: the forces each drone can generate are strictly limited, the overall motion is complex, and the robot must stay stable while being buffeted by wind and while pushing against surfaces such as walls or ceilings.
Feeling forces without adding heavy sensors
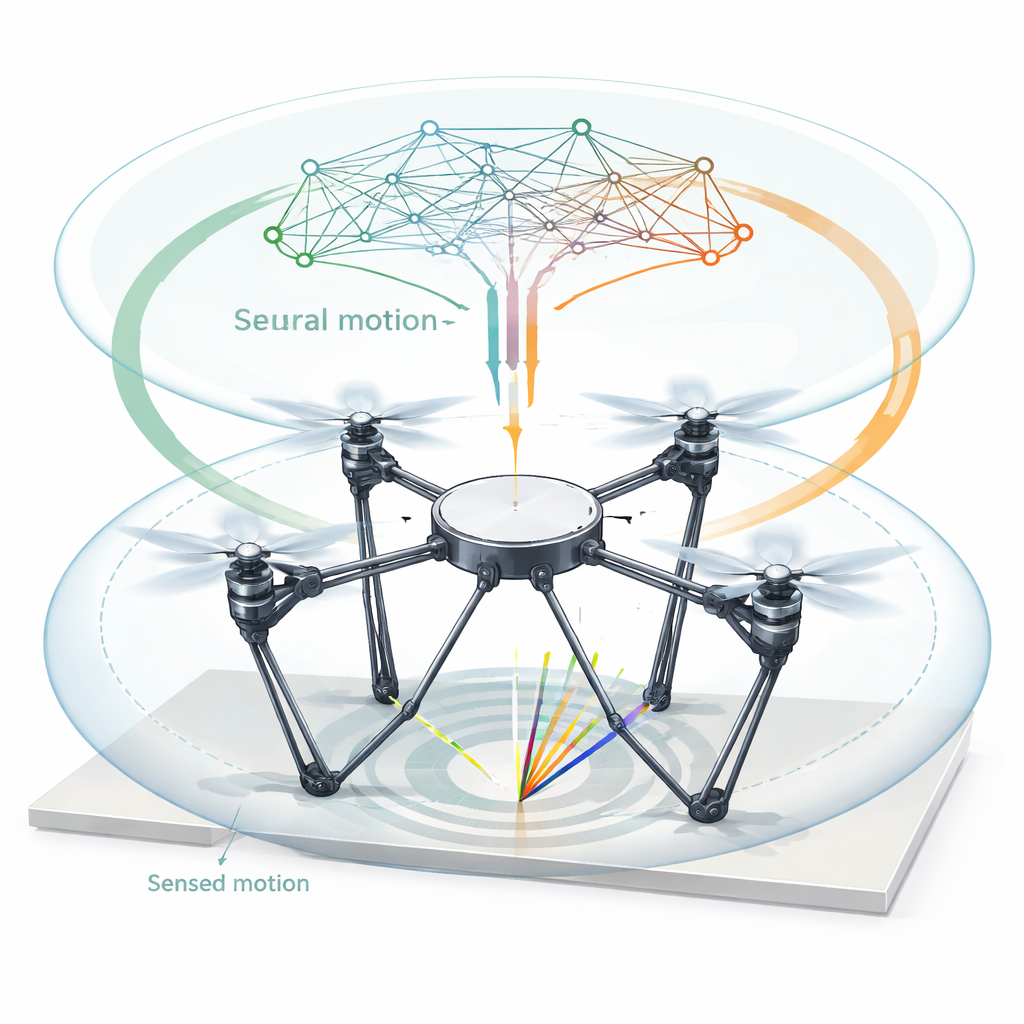
Most robots that interact physically with their surroundings use dedicated force sensors at the point of contact. On a flying machine, extra sensors mean extra weight and shorter flight times. To avoid this, the authors design a “wrench observer” that estimates the contact forces and moments by watching how the robot’s motion changes in response to the thrust from the drones. This observer is based on the idea of generalized momentum: by combining the robot’s mass, movement, and the known thrust inputs, the algorithm reconstructs the external push or pull acting on the platform. A built‑in low‑pass filter smooths out measurement noise so that the estimated forces remain reliable even when the motion data are imperfect.
Teaching a flying robot to yield like a spring
To keep interactions gentle and predictable, the team uses an approach called impedance control, which makes the robot behave as if it were connected to the environment by an adjustable mass‑spring‑damper system. Instead of trying to hold its position rigidly, the platform can “give” in response to contact, much like a well‑tuned suspension. Designing such behavior is hard when the robot’s true dynamics are only roughly known and the drones can easily reach their thrust limits. The authors tackle this by embedding a learning system based on radial basis function neural networks. These networks continuously approximate unknown effects such as unmodeled aerodynamics and changing payloads, and an adaptive law derived from Lyapunov stability theory ensures that the learning process does not destabilize the robot.
Staying stable when motors hit their limits
A key practical risk is actuator saturation: each rotor can push only so hard. If the controller demands more thrust than the motors can provide, the mismatch can cause large tracking errors or even loss of control. Instead of re‑shaping all variables into a complicated new coordinate system, the authors introduce an auxiliary dynamic system that specifically compensates for the difference between the commanded wrench and the thrust that is actually achievable. This extra loop works together with the impedance controller and the neural networks to keep the overall behavior stable, even when the motors are operating at their bounds.
Putting the new control method to the test
The researchers evaluate their approach using a detailed virtual prototype of the flying parallel robot built in a mechanical simulation environment and linked in real time to a control model. They subject the system to measurement noise, payload changes, and strict thrust limits to mirror real‑world conditions. The new controller is compared against two alternatives: a standard proportional‑derivative controller and a simpler impedance controller that also uses estimated forces but lacks neural learning and saturation compensation. In both free‑flight trajectory tracking and contact tasks against a virtual surface, the proposed method delivers the smallest position and orientation errors, the most accurate force regulation, and the most stable behavior, all while keeping motor commands within safe bounds.
Why this matters for future flying workers
In everyday terms, the work shows how a team of drones can be coordinated to act like a single, powerful, and surprisingly gentle robotic hand in the air. By estimating forces without extra sensors, learning uncertain dynamics on the fly, and respecting the physical limits of the motors, the proposed control scheme allows the flying parallel robot to touch and manipulate its environment safely and reliably. This combination of strength, adaptability, and compliance is a step toward aerial robots that can carry out practical maintenance and assembly tasks in places that are difficult or dangerous for humans to reach.
Citation: Zhu, M., Guo, Y., Gong, D. et al. Force sensorless interaction wrench estimation for neural-learning impedance control of a flying parallel robot with actuator saturation. Sci Rep 16, 12605 (2026). https://doi.org/10.1038/s41598-026-42788-2
Keywords: aerial robots, multi-drone cooperation, force control, neural network control, physical interaction