Clear Sky Science · ja
アクチュエータ飽和下での飛行並列ロボットの神経学習インピーダンス制御のための力センサレス相互作用ワレンチ推定
世界に安全に触れられるロボットの補助者
飛行するだけでなく物体を押したり引いたりねじったりできる空中ロボットは、将来的に橋の検査、電線の修理、手の届きにくい場所での構造物の組み立てなどを担える可能性があります。しかし、飛行機体を強く、精密に、かつ周囲に安全に接触できるようにするのは極めて困難です。本稿では、重い荷物を運びつつ環境と穏やかに相互作用でき、重い力センサーを必要とせずにモーターの出力制限内で動作する特殊なマルチドローン型ロボット向けの新しい制御手法を紹介します。
一体となって働く飛行チーム
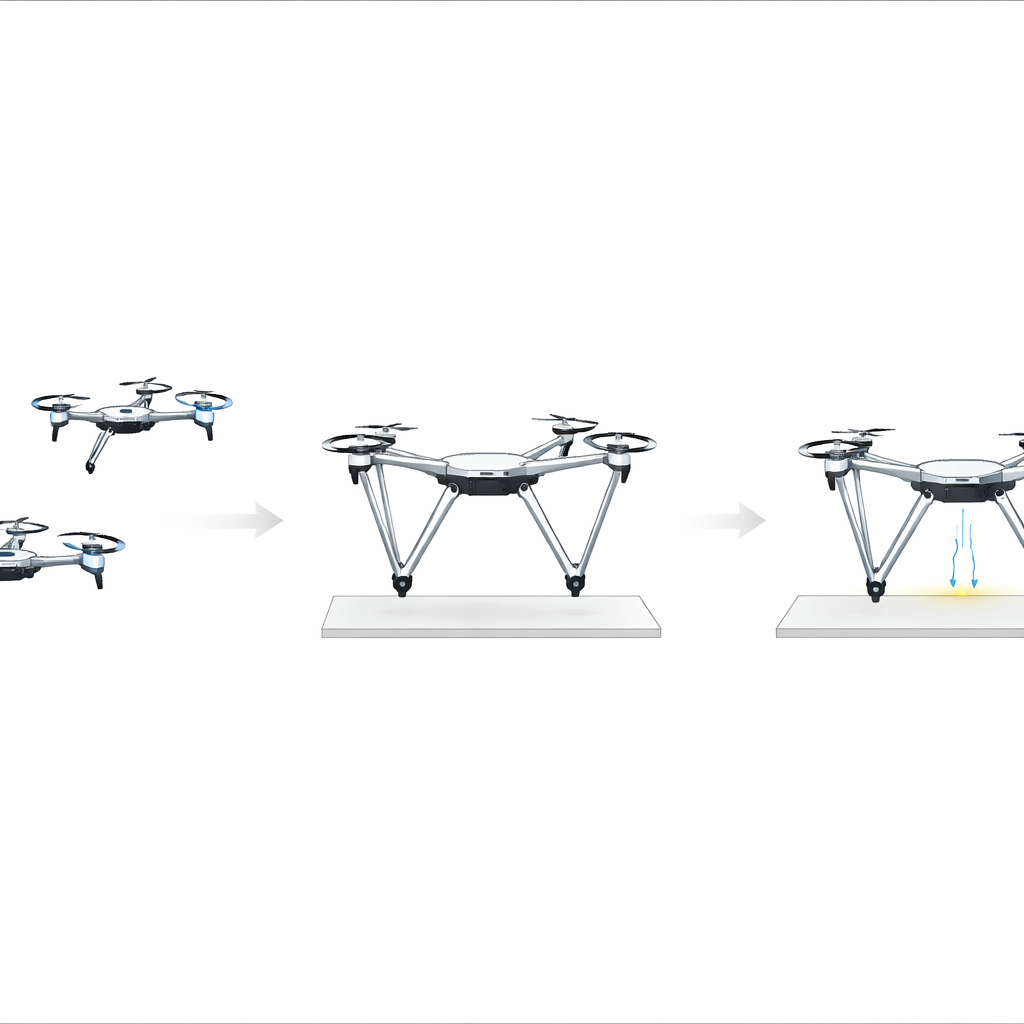
単一のドローンに小さなアームを付ける代わりに、研究者らは3機のクアッドローターを剛体脚で中央の移動プラットフォームに接続した「飛行並列ロボット」を検討します。協調することで、ドローン群は単独機より大きなペイロードを支え、力をより均等に適用できます。しかしこの構成は、各ドローンが発生できる力に厳しい制限があること、全体の運動が複雑であること、風や壁・天井などの面に押し当てられた際にも安定を保たねばならないことといった重大な課題をもたらします。
重いセンサーを追加せずに力を感じ取る
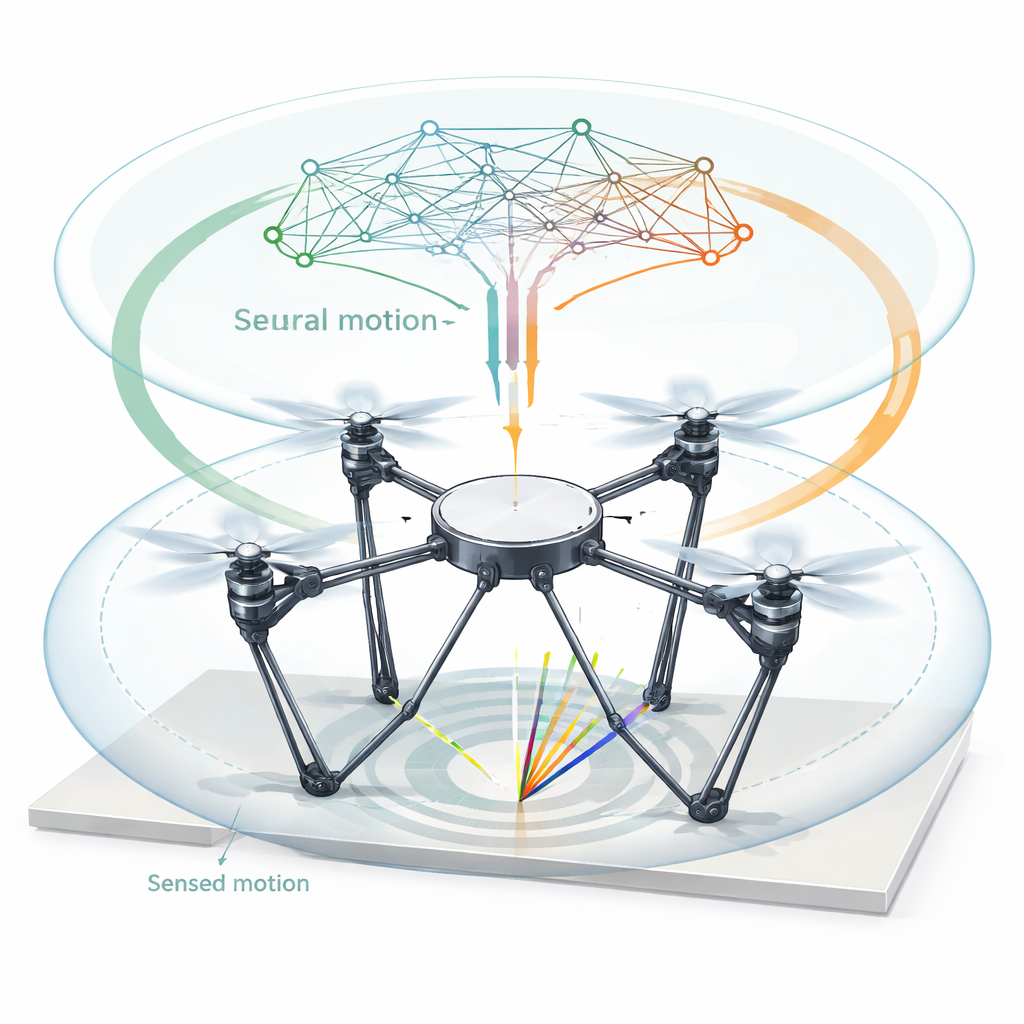
物理的に相互作用するほとんどのロボットは接触点に専用の力センサーを用います。飛行機体では追加のセンサーは重量増となり飛行時間を短くします。これを避けるために著者らは、ドローンの推力に対するロボットの運動変化を観測することで接触力とモーメントを推定する「ワレンチオブザーバ」を設計しました。このオブザーバは一般化運動量の概念に基づいており、ロボットの質量、運動、既知の推力入力を組み合わせてプラットフォームに作用する外部の押し引きを復元します。組み込みのローパスフィルタが測定ノイズを平滑化するため、運動データが不完全でも推定された力は信頼できるものとなります。
バネのように応じる飛行ロボットを学習させる
相互作用を穏やかで予測可能に保つために、チームはインピーダンス制御という手法を用います。これはロボットが環境と調整可能な質量―バネ―ダンパ系で接続されているかのように振る舞わせるものです。位置を厳密に保持しようとする代わりに、プラットフォームは接触に応じて「しなる」ことができ、よく調整されたサスペンションのような挙動を示します。ロボットの真の動力学が大まかにしか分からず、ドローンが容易に推力限界に達する場合、この挙動設計は難しくなります。著者らは放射基底関数ニューラルネットワークに基づく学習システムを組み込み、未モデル化の空力や変化するペイロードなどの未知の影響を継続的に近似します。さらに、ライアプノフ安定性理論に基づく適応則により、学習過程がロボットの不安定化を引き起こさないことが保証されます。
モーターが限界に達しても安定を保つ
実用上の重要なリスクはアクチュエータの飽和です:各ローターはある限度までしか推力を出せません。コントローラがモーターの供給可能量を超える推力を要求すると、その不一致は大きな追従誤差や制御喪失を引き起こす可能性があります。すべての変数を複雑な新しい座標系に書き換える代わりに、著者らは指令されたワレンチと実際に達成可能な推力との差を特異的に補償する補助動的システムを導入します。この追加ループはインピーダンスコントローラとニューラルネットワークと協調して動作し、モーターが運転限界にある場合でも全体の挙動を安定に保ちます。
新しい制御法の実証
研究者らは、機械シミュレーション環境で構築した飛行並列ロボットの詳細な仮想プロトタイプとリアルタイムでリンクした制御モデルを用いて提案法を評価します。測定ノイズ、ペイロード変化、厳しい推力制限を課して実世界の条件を模倣します。新しいコントローラは標準的な比例微分(PD)コントローラと、推定力を用いるがニューラル学習と飽和補償を欠く単純なインピーダンスコントローラの2つの代替手法と比較されます。自由飛行の軌道追従と仮想面への接触タスクの両方において、提案手法は位置・姿勢誤差が最小で、力の制御精度が最も高く、挙動が最も安定しており、同時にモーター指令を安全な範囲内に保つことを示しました。
将来の空中作業者にとっての意義
日常的な観点では、本研究はドローンのチームが空中で一つの強力で意外に繊細なロボットの手のように協調できることを示しています。追加センサーなしで力を推定し、飛行中に不確かな動力学を学習し、モーターの物理的限界を尊重することで、提案する制御方式は飛行並列ロボットが安全かつ確実に環境に触れ操作することを可能にします。この強さ、適応性、コンプライアンスの組み合わせは、人間にとって到達困難または危険な場所で実用的なメンテナンスや組み立て作業を行う空中ロボットに向けた一歩です。
引用: Zhu, M., Guo, Y., Gong, D. et al. Force sensorless interaction wrench estimation for neural-learning impedance control of a flying parallel robot with actuator saturation. Sci Rep 16, 12605 (2026). https://doi.org/10.1038/s41598-026-42788-2
キーワード: 空中ロボット, マルチドローン協調, 力制御, ニューラルネットワーク制御, 物理的相互作用