Clear Sky Science · pt
Estimativa de wrench de interação sem sensor de força para controle de impedância com aprendizado neural de um robô paralelo voador com saturação de atuadores
Assistentes robóticos que podem tocar o mundo com segurança
Robôs aéreos que não só voam, mas também empurram, puxam ou torcem objetos poderiam um dia inspecionar pontes, reparar linhas de energia ou montar estruturas em locais de difícil acesso. No entanto, fazer com que máquinas voadoras sejam fortes, precisas e seguras o suficiente para tocar fisicamente seu entorno é extremamente difícil. Este artigo apresenta um novo método de controle para um tipo especial de robô multi-drone que pode transportar cargas maiores e interagir de forma suave com o ambiente, sem precisar de sensores de força volumosos e mantendo-se dentro dos limites de potência de seus motores.
Uma equipe voadora atuando como um único robô potente
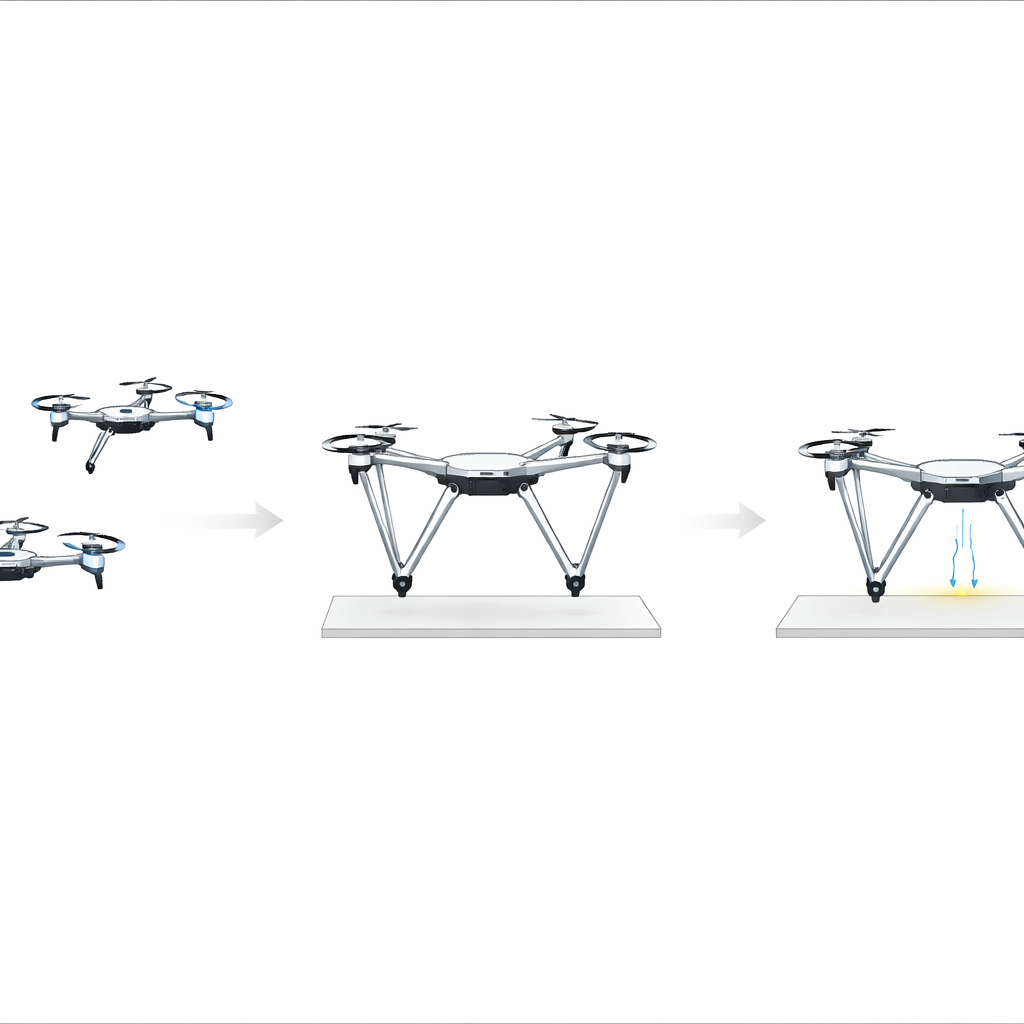
Em vez de montar um pequeno braço em um único drone, os pesquisadores estudam um “robô paralelo voador” construído a partir de três quadrotors conectados por pernas rígidas a uma plataforma móvel central. Trabalhando em conjunto, os drones podem suportar cargas maiores e aplicar forças de forma mais uniforme do que um único veículo. No entanto, esse projeto também traz desafios sérios: as forças que cada drone pode gerar são estritamente limitadas, o movimento geral é complexo, e o robô deve permanecer estável enquanto é afetado pelo vento e enquanto empurra superfícies como paredes ou tetos.
Sentindo forças sem acrescentar sensores pesados
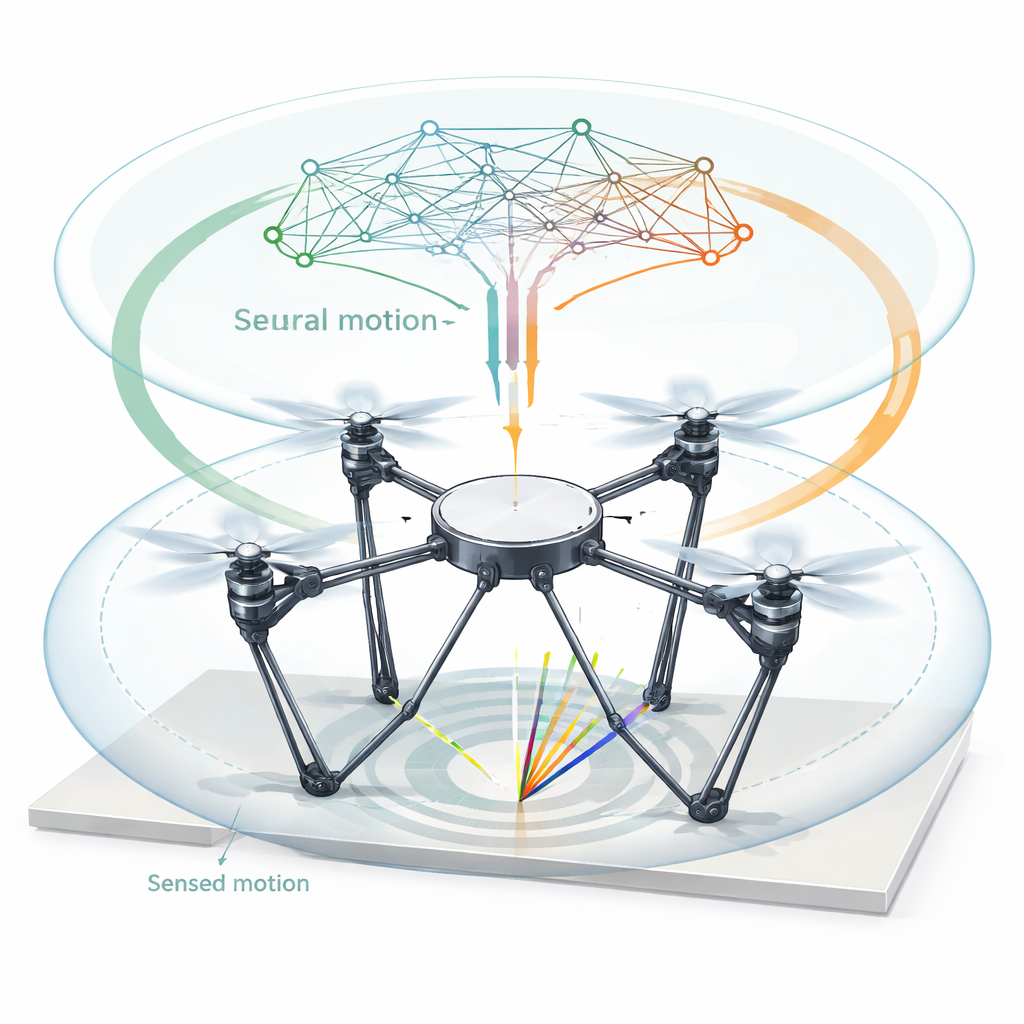
A maioria dos robôs que interage fisicamente com o ambiente usa sensores de força dedicados no ponto de contato. Em uma máquina voadora, sensores extras significam peso adicional e tempos de voo mais curtos. Para evitar isso, os autores projetam um “observador de wrench” que estima as forças e momentos de contato observando como o movimento do robô muda em resposta ao empuxo dos drones. Esse observador baseia-se na ideia de momento generalizado: ao combinar a massa do robô, seu movimento e as entradas conhecidas de empuxo, o algoritmo reconstrói o empurrão ou tração externa atuando na plataforma. Um filtro passa-baixa incorporado suaviza o ruído de medição para que as forças estimadas permaneçam confiáveis mesmo quando os dados de movimento são imperfeitos.
Ensinando um robô voador a ceder como uma mola
Para manter as interações suaves e previsíveis, a equipe utiliza uma abordagem chamada controle de impedância, que faz o robô se comportar como se estivesse conectado ao ambiente por um sistema massa-mola-amortecedor ajustável. Em vez de tentar manter sua posição de forma rígida, a plataforma pode “ceder” em resposta ao contato, de modo semelhante a uma suspensão bem ajustada. Projetar esse comportamento é difícil quando a dinâmica verdadeira do robô é apenas vagamente conhecida e os drones podem facilmente atingir seus limites de empuxo. Os autores enfrentam isso incorporando um sistema de aprendizado baseado em redes neurais com funções de base radial. Essas redes aproximam continuamente efeitos desconhecidos, como aerodinâmica não modelada e variações de carga útil, e uma lei adaptativa derivada da teoria de estabilidade de Lyapunov garante que o processo de aprendizado não desestabilize o robô.
Mantendo a estabilidade quando os motores atingem seus limites
Um risco prático chave é a saturação dos atuadores: cada rotor só pode fornecer um empuxo limitado. Se o controlador exigir mais empuxo do que os motores conseguem fornecer, a discrepância pode causar grandes erros de seguimento ou até perda de controle. Em vez de remodelar todas as variáveis em um sistema de coordenadas novo e complicado, os autores introduzem um sistema dinâmico auxiliar que compensa especificamente a diferença entre o wrench comandado e o empuxo realmente alcançável. Esse laço adicional trabalha junto com o controlador de impedância e as redes neurais para manter o comportamento geral estável, mesmo quando os motores estão operando em seus limites.
Testando o novo método de controle
Os pesquisadores avaliam sua abordagem usando um protótipo virtual detalhado do robô paralelo voador construído em um ambiente de simulação mecânica e conectado em tempo real a um modelo de controle. Eles submetem o sistema a ruído de medição, mudanças de carga útil e limites de empuxo rigorosos para espelhar condições do mundo real. O novo controlador é comparado com duas alternativas: um controlador proporcional-derivativo padrão e um controlador de impedância mais simples que também usa forças estimadas, mas não possui aprendizado neural nem compensação de saturação. Tanto no rastreamento de trajetórias em voo livre quanto em tarefas de contato contra uma superfície virtual, o método proposto apresenta os menores erros de posição e orientação, a regulação de força mais precisa e o comportamento mais estável, tudo isso mantendo os comandos de motor dentro de limites seguros.
Por que isso importa para futuros trabalhadores voadores
Em termos práticos, o trabalho mostra como uma equipe de drones pode ser coordenada para atuar como uma única mão robótica aérea, potente e surpreendentemente delicada. Ao estimar forças sem sensores adicionais, aprender dinâmicas incertas em tempo real e respeitar os limites físicos dos motores, o esquema de controle proposto permite que o robô paralelo voador toque e manipule seu ambiente de forma segura e confiável. Essa combinação de força, adaptabilidade e conformidade é um passo em direção a robôs aéreos capazes de realizar tarefas práticas de manutenção e montagem em locais difíceis ou perigosos para humanos.
Citação: Zhu, M., Guo, Y., Gong, D. et al. Force sensorless interaction wrench estimation for neural-learning impedance control of a flying parallel robot with actuator saturation. Sci Rep 16, 12605 (2026). https://doi.org/10.1038/s41598-026-42788-2
Palavras-chave: robôs aéreos, cooperação multi-drone, controle de força, controle por rede neural, interação física