Clear Sky Science · nl
Kracht‑sensorloze schatting van interaction wrench voor neurale‑leer impedantieregeling van een vliegend parallelrobot met actuatorsaturatie
Robothulpen die de wereld veilig kunnen aanraken
Luchtvaartuigen die niet alleen kunnen vliegen maar ook objecten kunnen duwen, trekken of draaien, zouden ooit bruggen kunnen inspecteren, hoogspanningsleidingen repareren of constructies assembleren op moeilijk bereikbare locaties. Het maken van vliegende machines die sterk, nauwkeurig en veilig genoeg zijn om hun omgeving fysiek aan te raken is echter zeer lastig. Dit artikel introduceert een nieuwe regelmethode voor een speciaal type multi‑drone robot die zwaardere lasten kan dragen en zachtzinnig met de omgeving kan werken, zonder zware krachtsensoren en binnen de vermogensgrenzen van zijn motoren.
Een vliegend team dat als één sterke robot optreedt
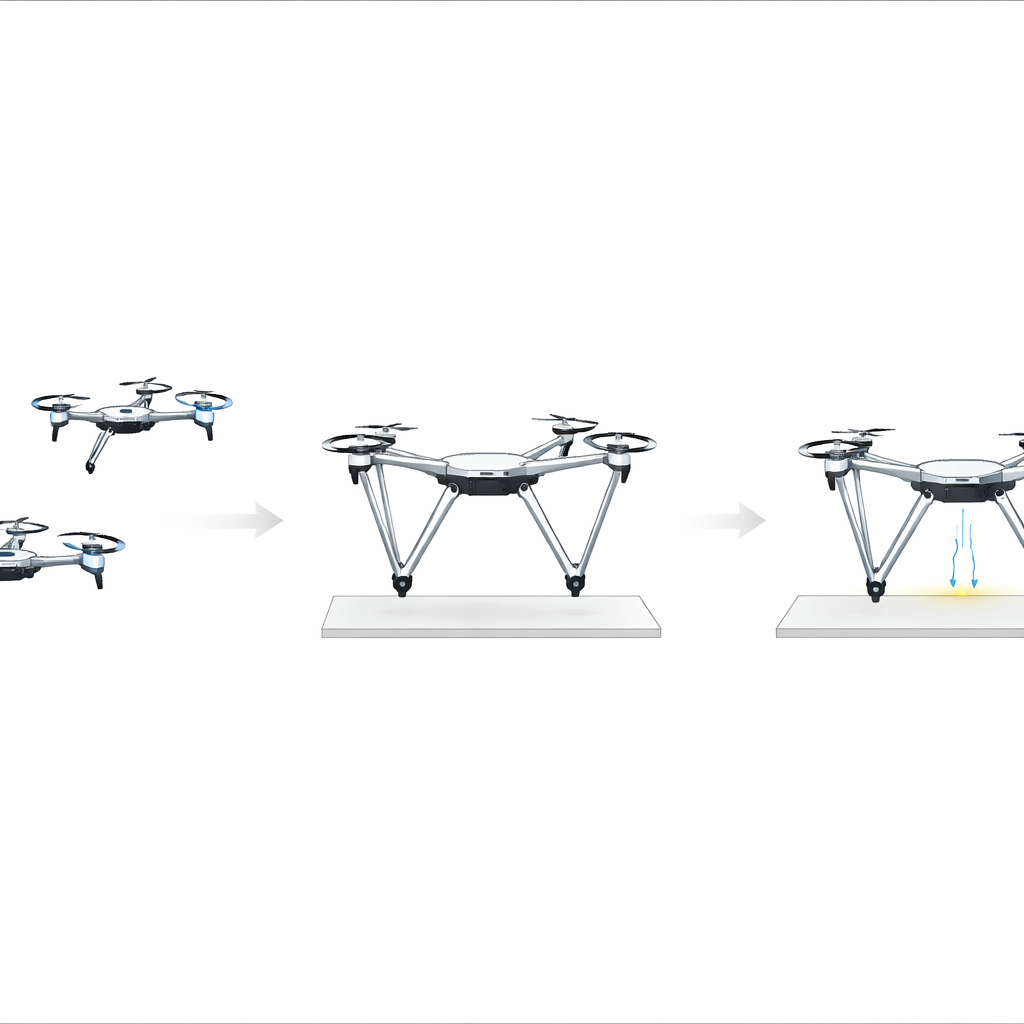
In plaats van een kleine arm op één drone te monteren, bestuderen de onderzoekers een “vliegende parallelrobot” opgebouwd uit drie quadrotors die met stijve poten aan een centraal beweegbaar platform zijn verbonden. Door samen te werken kunnen de drones grotere ladingen dragen en krachten gelijkmatiger uitoefenen dan één voertuig. Tegelijk brengt dit ontwerp serieuze uitdagingen met zich mee: de krachten die elke drone kan leveren zijn strikt gelimiteerd, de totale beweging is complex en de robot moet stabiel blijven bij windinvloeden en bij het duwen tegen oppervlakken zoals wanden of plafonds.
Krachten voelen zonder zware sensoren toe te voegen
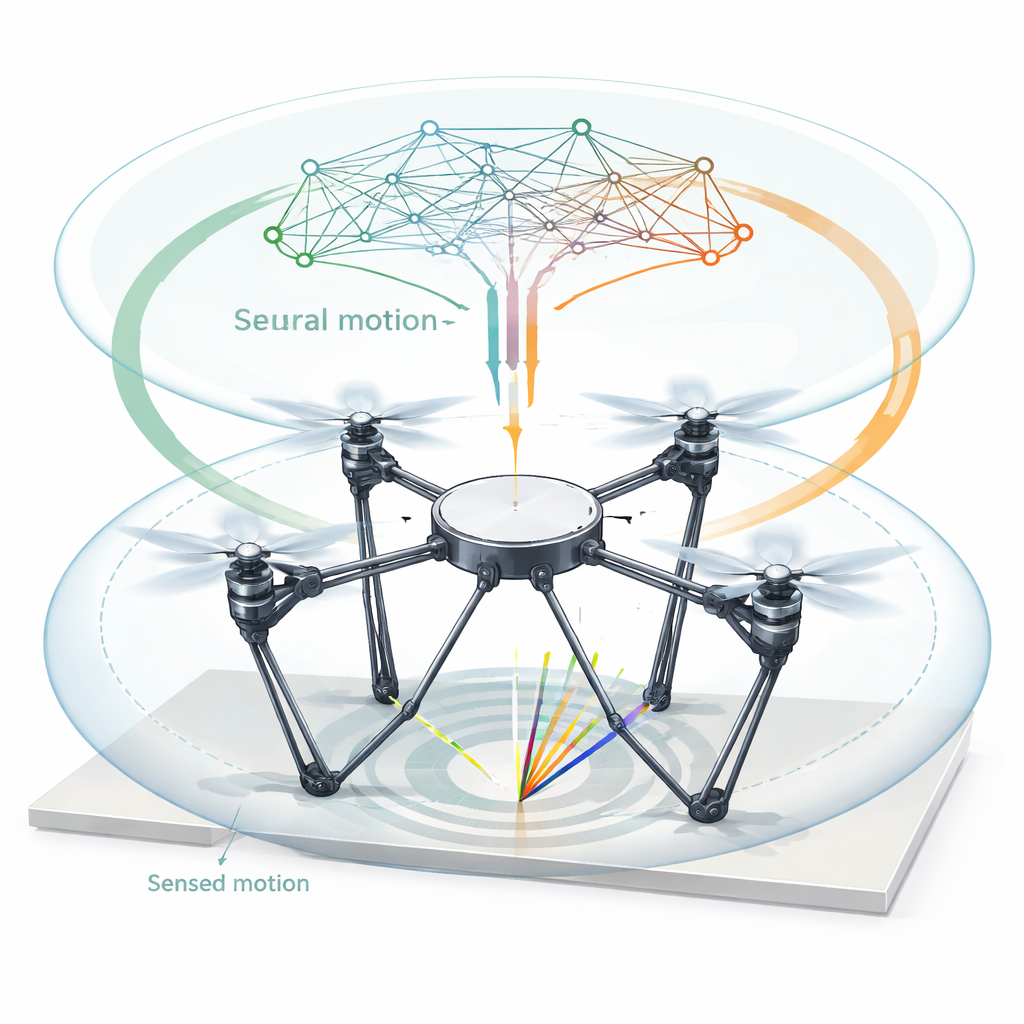
De meeste robots die fysiek met de omgeving interacteren gebruiken speciale krachtsensoren op het contactpunt. Bij een vliegend toestel betekenen extra sensoren extra gewicht en kortere vliegtijden. Om dit te vermijden ontwerpen de auteurs een “wrench observer” die de contactkrachten en -momenten schat door te kijken hoe de beweging van de robot verandert als reactie op de stuwkracht van de drones. Deze observer is gebaseerd op het idee van gegeneraliseerde impuls: door de massa, beweging en bekende stuwstootinputs van de robot te combineren, reconstrueert het algoritme de externe duw of trek op het platform. Een ingebouwde laagdoorlaatfilter dempt meetruis zodat de geschatte krachten betrouwbaar blijven, zelfs wanneer de bewegingsgegevens onvolmaakt zijn.
Een vliegende robot leren meegeven zoals een veer
Om interacties zacht en voorspelbaar te houden gebruikt het team een methode genaamd impedantieregeling, die de robot laat gedragen alsof hij met de omgeving is verbonden via een instelbaar massa‑veer‑demper systeem. In plaats van stijf zijn positie vast te houden kan het platform meegeven bij contact, vergelijkbaar met een goed afgestelde vering. Het ontwerpen van dergelijk gedrag is lastig wanneer de werkelijke dynamica van de robot slechts globaal bekend is en de drones snel hun stuwgrenzen bereiken. De auteurs tackelen dit door een leersysteem in te bouwen op basis van radiale basisfunctie‑neurale netwerken. Deze netwerken benaderen continu onbekende effecten zoals niet‑gemodelleerde aerodynamica en veranderende ladingen, en een adaptieve regelwet afgeleid uit Lyapunov‑stabiliteitstheorie zorgt ervoor dat het leerproces de robot niet destabiliseert.
Stabiel blijven wanneer motoren hun limiet bereiken
Een belangrijk praktisch risico is actuatorsaturatie: elke rotor kan maar tot op zekere hoogte duwen. Als de regelaar meer stuwkracht vraagt dan de motoren kunnen leveren, kan de mismatch grote volgfouten of zelfs verlies van controle veroorzaken. In plaats van alle variabelen in een ingewikkeld nieuw coördinatensysteem te herleiden, introduceren de auteurs een extra dynamisch systeem dat specifiek compenseert voor het verschil tussen het gevraagde wrench en de daadwerkelijk haalbare stuwkracht. Deze extra lus werkt samen met de impedantiecontroller en de neurale netwerken om het algehele gedrag stabiel te houden, zelfs wanneer de motoren aan hun grenzen opereren.
De nieuwe regelmethode aan de tand gevoeld
De onderzoekers evalueren hun aanpak met een gedetailleerd virtueel prototype van de vliegende parallelrobot, opgebouwd in een mechanische simulatieomgeving en in realtime gekoppeld aan een regelmodel. Ze onderwerpen het systeem aan meetruis, ladingwisselingen en strikte stuwlimieten om echte omstandigheden te benaderen. De nieuwe regelaar wordt vergeleken met twee alternatieven: een standaard proportioneel‑differentieel (PD) regelaar en een eenvoudigere impedantiecontroller die ook geschatte krachten gebruikt maar zonder neurale leercomponent en zonder saturatiecompensatie. Zowel bij vrije‑vlucht trajectvolging als bij contacttaken tegen een virtueel oppervlak levert de voorgestelde methode de kleinste positie‑ en oriëntatiefouten, de meest accurate krachtsregeling en het meest stabiele gedrag, terwijl de motorkommandos binnen veilige grenzen blijven.
Waarom dit ertoe doet voor toekomstige vliegende werkers
In gewone bewoordingen toont dit werk aan hoe een team drones gecoördineerd kan worden om te fungeren als één krachtige en verrassend zachte robotische hand in de lucht. Door krachten te schatten zonder extra sensoren, onzekerheden in de dynamica onderweg te leren en de fysieke limieten van de motoren te respecteren, maakt het voorgestelde regelschema het vliegende parallelrobot mogelijk om zijn omgeving veilig en betrouwbaar aan te raken en te manipuleren. Deze combinatie van kracht, aanpassingsvermogen en compliance is een stap richting luchtvaartuigen die praktische onderhouds‑ en assemblagetaken kunnen uitvoeren op plekken die voor mensen moeilijk of gevaarlijk bereikbaar zijn.
Bronvermelding: Zhu, M., Guo, Y., Gong, D. et al. Force sensorless interaction wrench estimation for neural-learning impedance control of a flying parallel robot with actuator saturation. Sci Rep 16, 12605 (2026). https://doi.org/10.1038/s41598-026-42788-2
Trefwoorden: luchtvaartrobots, multi‑drone samenwerking, krachtregeling, neurale netwerkregeling, fysieke interactie