Clear Sky Science · it
Stima della forza di contatto senza sensori per controllo d’impedenza con apprendimento neurale di un robot parallelo volante con saturazione degli attuatori
Assistenti robotici che possono toccare il mondo in sicurezza
I robot aerei che non solo volano ma possono anche spingere, tirare o ruotare oggetti potrebbero un giorno ispezionare ponti, riparare linee elettriche o assemblare strutture in punti difficili da raggiungere. Tuttavia rendere i velivoli abbastanza forti, precisi e sicuri da entrare in contatto fisico con l’ambiente è estremamente complesso. Questo articolo presenta un nuovo metodo di controllo per una particolare tipologia di robot multi-drone che può trasportare carichi più pesanti e interagire con delicatezza, senza sensori di forza ingombranti e rimanendo entro i limiti di potenza dei motori.
Una squadra volante che agisce come un unico robot potente
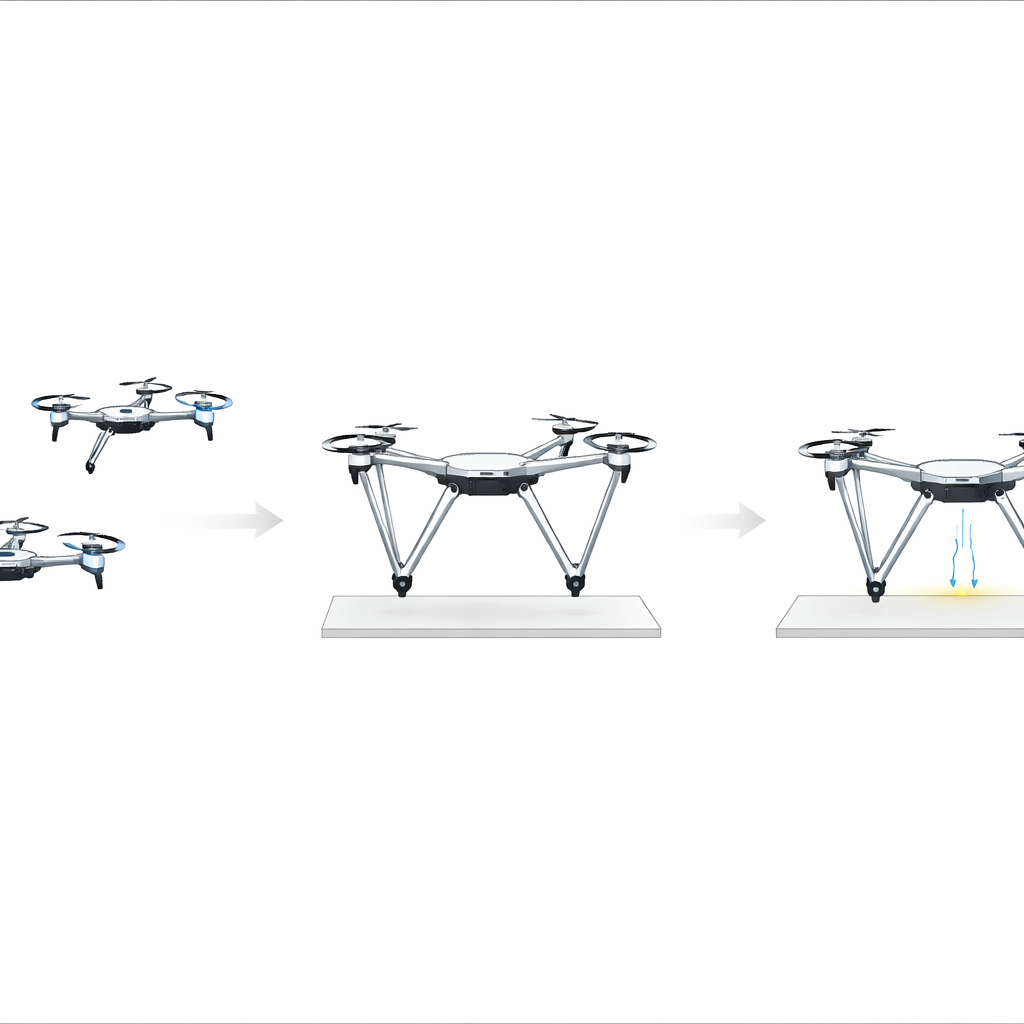
Invece di montare un piccolo braccio su un singolo drone, gli autori studiano un “robot parallelo volante” composto da tre quadrotori collegati con gambe rigide a una piattaforma centrale mobile. Lavorando insieme, i droni possono sostenere carichi maggiori e applicare forze in modo più uniforme rispetto a un singolo velivolo. Tuttavia questo progetto comporta sfide significative: le forze generabili da ciascun drone sono strettamente limitate, il moto complessivo è complesso e il robot deve restare stabile mentre è soggetto al vento o preme contro superfici come pareti o soffitti.
Percepire le forze senza aggiungere sensori pesanti
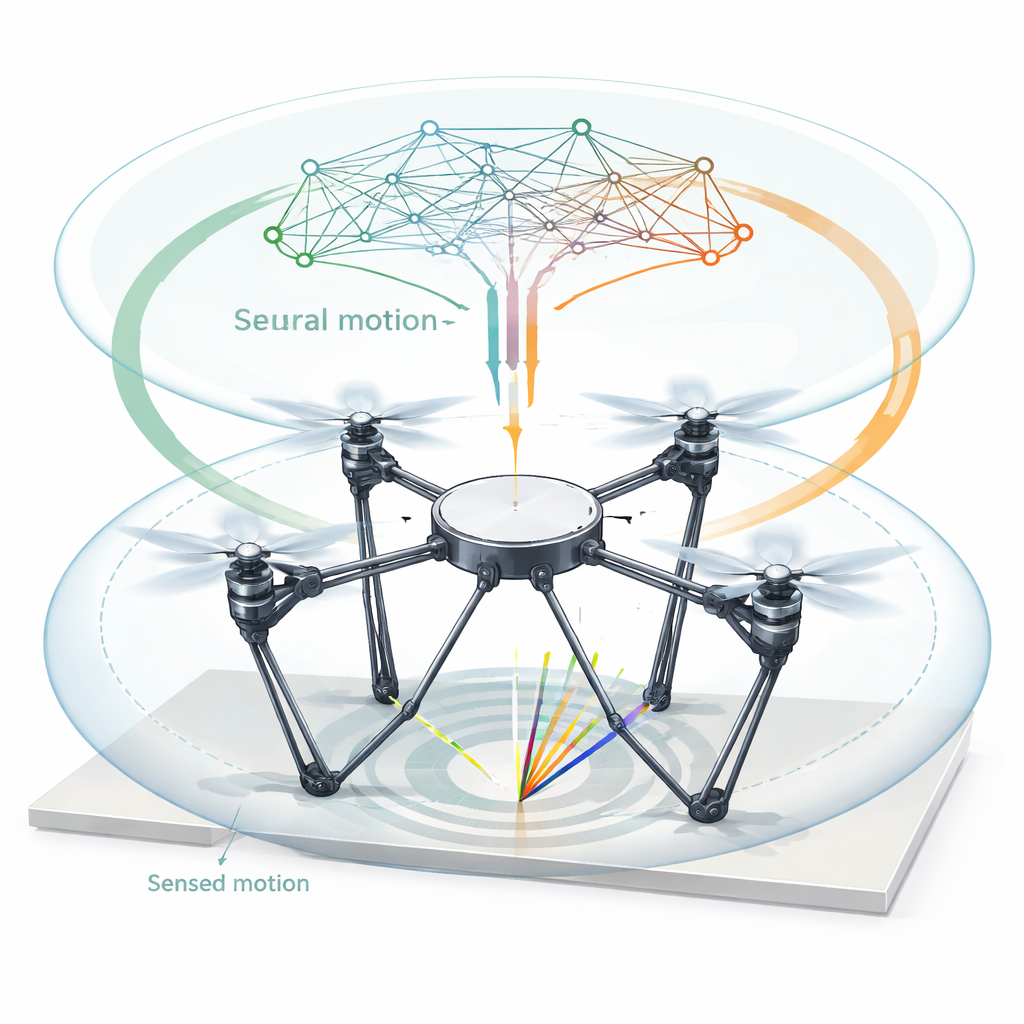
La maggior parte dei robot che interagiscono fisicamente con l’ambiente usa sensori di forza dedicati nel punto di contatto. Su un velivolo, sensori aggiuntivi significano peso supplementare e tempi di volo ridotti. Per evitare ciò, gli autori progettano un “osservatore di wrench” che stima le forze e i momenti di contatto osservando come cambia il moto del robot in risposta alla spinta dei droni. Questo osservatore si basa sull’idea della quantità di moto generalizzata: combinando massa, movimento e gli input di spinta noti, l’algoritmo ricostruisce la spinta esterna che agisce sulla piattaforma. Un filtro passa‑basso integrato attenua il rumore di misura in modo che le forze stimate restino affidabili anche quando i dati di moto sono imperfetti.
Insegnare a un robot volante a cedere come una molla
Per mantenere le interazioni morbide e prevedibili, il gruppo usa un approccio chiamato controllo d’impedenza, che fa comportare il robot come se fosse collegato all’ambiente tramite un sistema massa‑molla‑smorzatore regolabile. Invece di cercare di mantenere rigidamente la posizione, la piattaforma può “cedere” in risposta al contatto, come una sospensione ben tarata. Progettare tale comportamento è difficile quando la dinamica reale del robot è solo approssimativamente nota e i droni possono facilmente raggiungere i limiti di spinta. Gli autori affrontano questo problema integrando un sistema di apprendimento basato su reti neurali a funzione di base radiale. Queste reti approssimano continuamente effetti sconosciuti come aerodinamica non modellata e variazioni del carico utile, e una legge adattativa derivata dalla teoria della stabilità di Lyapunov assicura che il processo di apprendimento non destabilizzi il robot.
Mantenere la stabilità quando i motori raggiungono i limiti
Un rischio pratico chiave è la saturazione degli attuatori: ogni rotore può generare spinta solo entro certi limiti. Se il controllore richiede più spinta di quella che i motori possono fornire, la discrepanza può causare grandi errori di inseguimento o perfino perdita di controllo. Invece di ricostruire tutte le variabili in un sistema di coordinate complesso, gli autori introducono un sistema dinamico ausiliario che compensa specificamente la differenza tra il wrench comandato e la spinta effettivamente realizzabile. Questo anello aggiuntivo lavora insieme al controllore d’impedenza e alle reti neurali per mantenere il comportamento complessivo stabile, anche quando i motori operano ai loro limiti.
Mettere alla prova il nuovo metodo di controllo
Gli autori valutano il loro approccio usando un prototipo virtuale dettagliato del robot parallelo volante costruito in un ambiente di simulazione meccanica e collegato in tempo reale a un modello di controllo. Sottopongono il sistema a rumore di misura, variazioni di carico utile e severi limiti di spinta per riflettere condizioni realistiche. Il nuovo controllore viene confrontato con due alternative: un controllore proporzionale‑derivativo standard e un controllore d’impedenza più semplice che utilizza anch’esso forze stimate ma è privo di apprendimento neurale e compensazione della saturazione. Sia nel tracciamento di traiettorie in volo libero sia nei compiti di contatto contro una superficie virtuale, il metodo proposto fornisce gli errori di posizione e orientamento più piccoli, la regolazione della forza più accurata e il comportamento più stabile, mantenendo al contempo i comandi ai motori entro limiti di sicurezza.
Perché è importante per i lavoratori volanti del futuro
In termini pratici, il lavoro mostra come una squadra di droni possa essere coordinata per agire come una singola mano robotica in aria, potente e sorprendentemente delicata. Stimando le forze senza sensori aggiuntivi, apprendendo dinamiche incerte in tempo reale e rispettando i limiti fisici dei motori, lo schema di controllo proposto permette al robot parallelo volante di toccare e manipolare l’ambiente in modo sicuro e affidabile. Questa combinazione di forza, adattabilità e conformità è un passo verso robot aerei in grado di svolgere compiti pratici di manutenzione e assemblaggio in luoghi difficili o pericolosi per gli esseri umani.
Citazione: Zhu, M., Guo, Y., Gong, D. et al. Force sensorless interaction wrench estimation for neural-learning impedance control of a flying parallel robot with actuator saturation. Sci Rep 16, 12605 (2026). https://doi.org/10.1038/s41598-026-42788-2
Parole chiave: robot aerei, cooperazione multi-drone, controllo della forza, controllo basato su reti neurali, interazione fisica