Clear Sky Science · ar
تقدير عزم التفاعل بدون مستشعر قوة للتحكم بالممانعة المتعلّم عصبيًا لروبوت طائر متوازي مع تشبع المحركات
مساعدون روبوتيون يمكنهم لمس العالم بأمان
الروبوتات الجوية التي لا تقتصر على الطيران فقط بل تستطيع أيضًا دفع أو سحب أو تدوير الأشياء قد تُستخدم يومًا لتفقد الجسور، إصلاح خطوط الكهرباء، أو تجميع هياكل في أماكن يصعب الوصول إليها. ومع ذلك، فإن جعل الطائرات الآلية قوية ودقيقة وآمنة بما يكفي للمس محيطها ماديًا أمر بالغ الصعوبة. تقدم هذه الورقة طريقة تحكم جديدة لنوع خاص من روبوتات متعددة الطائرات يمكنها حمل أحمال أثقل والتفاعل بلطف مع البيئة، دون الحاجة إلى مستشعرات قوة ثقيلة ومع الالتزام بحدود قدرة محركاتها.
فريق طائر يتصرف كروبوت قوي واحد
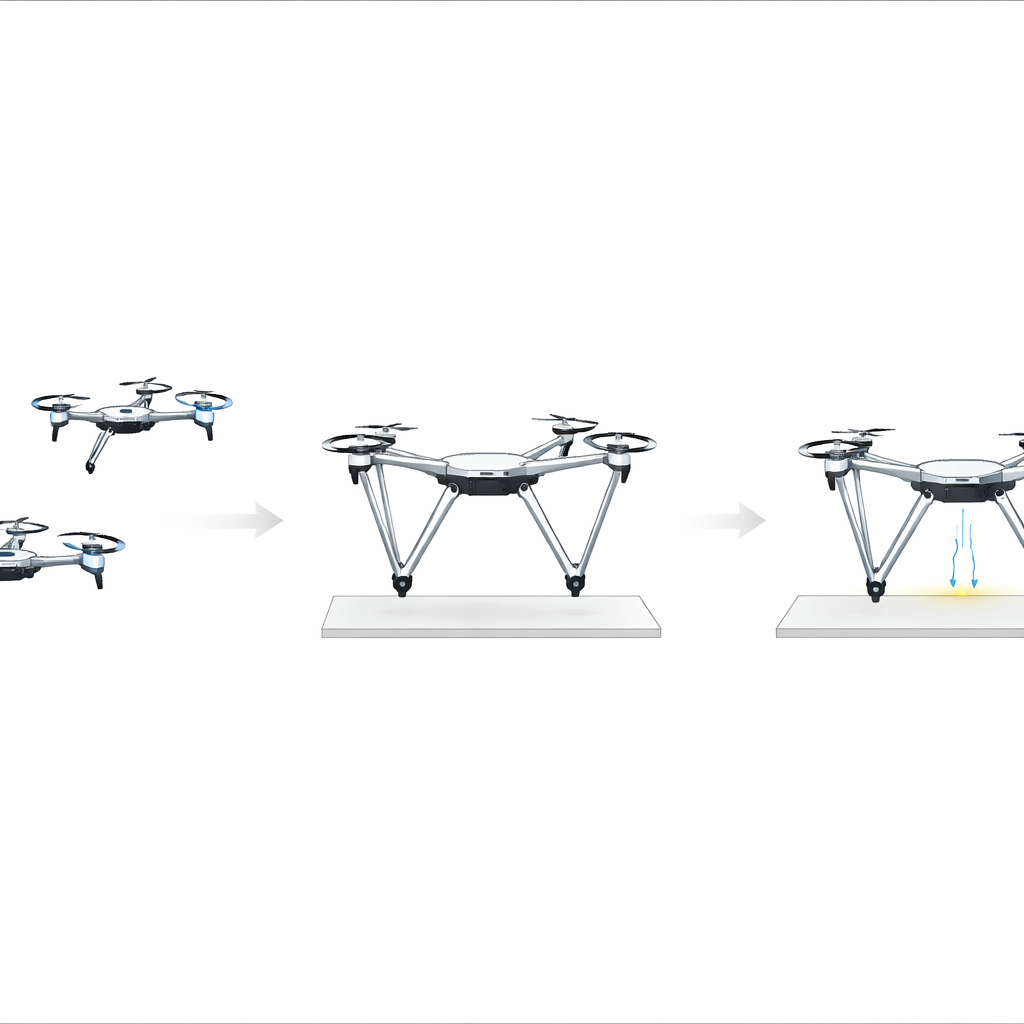
بدلاً من تركيب ذراع صغيرة على طائرة واحدة، يدرس الباحثون «روبوتًا طائرًا متوازيًا» مكوّنًا من ثلاث طائرات رباعية الدوار مرتبطة بسيقان صلبة بمنصة مركزية متحركة. بالتعاون، يمكن للطائرات دعم أحمال أكبر وتطبيق قوى بشكل أكثر توازناً من مركبة واحدة. مع ذلك، يجلب هذا التصميم تحديات جسيمة: فالقوى التي يمكن أن يولدها كل طائر محدودة بدقة، والحركة العامة معقدة، ويجب أن يبقى الروبوت مستقرًا أثناء التعرض للرياح وأثناء دفعه لأسطح مثل الجدران أو الأسقف.
الإحساس بالقوى دون إضافة مستشعرات ثقيلة
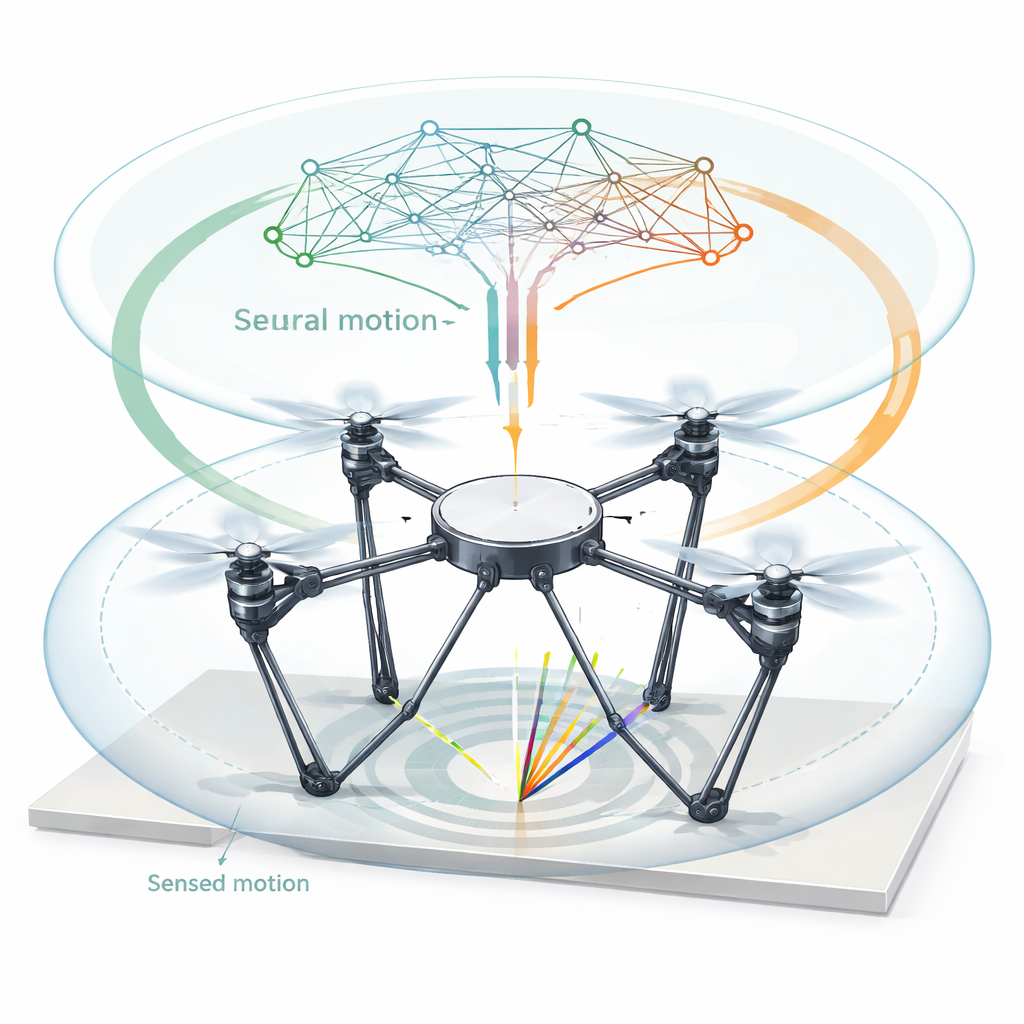
تستخدم معظم الروبوتات التي تتفاعل ماديًا مع محيطها مستشعرات قوة مخصصة عند نقطة التلامس. على آلة طائرة، تعني المستشعرات الإضافية وزنًا إضافيًا وأزمنة طيران أقصر. لتجنب ذلك، يصمم المؤلفون «مراقب عزوم» يقدّر قوى العِمَل والعزوم عند نقطة التلامس بمراقبة كيفية تغير حركة الروبوت استجابةً للدفع من الطائرات. يقوم هذا المراقب على فكرة الزخم المعمم: من خلال جمع كتلة الروبوت وحركته ومدخلات الدفع المعروفة، يعيد الخوارزمية بناء الدفع الخارجي أو السحب المؤثر على المنصة. مرشح تمرير‑منخفض مدمج ينعم ضوضاء القياس بحيث تظل القوى المقدّرة موثوقة حتى عندما تكون بيانات الحركة غير مثالية.
تعليم روبوت طائر أن يتنازل كزنبرك
للحفاظ على تفاعلات لطيفة ومتوقعة، يستخدم الفريق نهجًا يسمى التحكم بالممانعة، الذي يجعل الروبوت يتصرف كما لو كان متصلاً بالبيئة عبر نظام قابل للتعديل من كتلة‑زنبرك‑مخمد. بدلاً من محاولة الحفاظ على موضعه بصرامة، يمكن للمنصة «الاستسلام» استجابةً للتلامس، تمامًا مثل تعليق مضبوط جيدًا. تصميم هذا السلوك صعب عندما تكون ديناميكيات الروبوت الحقيقية معروفة تقريبًا فقط، ويمكن للطائرات بسهولة الوصول إلى حدود الدفع الخاصة بها. يواجه المؤلفون هذا بتضمين نظام تعلم يعتمد على شبكات عصبية بدوال أساس شعاعية. تقوم هذه الشبكات بتقريب التأثيرات المجهولة باستمرار مثل الديناميكا الهوائية غير المُنمذجة وتغيرات الحمولة، وقانون تكيفي مستمد من نظرية استقرار ليابونوف يضمن ألا يعطل عملية التعلم استقرار الروبوت.
الحفاظ على الاستقرار عندما تصل المحركات لحدودها
خطر عملي رئيسي هو تشبع المشغلات: فكل دوار يمكنه الدفع بحدود معينة فقط. إذا طالب المتحكم بدفع أكثر مما تستطيع المحركات توفيره، يمكن أن يتسبب الاختلاف في أخطاء تتبع كبيرة أو حتى فقدان السيطرة. بدلاً من إعادة تشكيل كل المتغيرات إلى نظام إحداثي جديد معقد، يقدم المؤلفون نظامًا ديناميكيًا مساعدًا يعوض تحديدًا الفرق بين العزم المأمور والقوة التي يمكن تحقيقها فعليًا. يعمل هذا الحلقة الإضافية بالتوازي مع متحكم الممانعة والشبكات العصبية للحفاظ على سلوك كلي مستقر، حتى عندما تعمل المحركات عند حدودها.
اختبار طريقة التحكم الجديدة
يقيم الباحثون نهجهم باستخدام نموذج افتراضي مفصل للروبوت الطائر المتوازي مبني في بيئة محاكاة ميكانيكية ومربوط في الوقت الحقيقي بنموذج تحكم. يتعرض النظام لضوضاء قياس، وتغيرات في الحمولة، وقيود صارمة على الدفع لمحاكاة ظروف العالم الحقيقي. يُقارن المتحكم الجديد ببديلين: متحكم نسبي‑تفاضلي قياسي ومتحكم ممانعة أبسط يستخدم أيضًا قوى مقدّرة لكنه يفتقر إلى التعلم العصبي وتعويض التشبع. في كل من تتبع المسار في الطيران الحر ومهام التلامس مع سطح افتراضي، يحقق الأسلوب المقترح أصغر أخطاء في الموضع والاتجاه، وأدق تنظيم للقوى، وأكثر سلوك استقرارًا، كل ذلك مع إبقاء أوامر المحرك ضمن حدود آمنة.
لماذا هذا مهم لعمال الطيران في المستقبل
بشكل مبسّط، تُظهر هذه الدراسة كيف يمكن تنسيق فريق من الطائرات ليعمل كيد جوّية واحدة قوية ولطيفة بشكل مفاجئ. من خلال تقدير القوى دون مستشعرات إضافية، وتعلّم الديناميكيات غير المؤكدة أثناء التشغيل، واحترام الحدود الفيزيائية للمحركات، يسمح مخطط التحكم المقترح للروبوت الطائر المتوازي بلمس وعبث بيئته بأمان واعتمادية. يجمع هذا المزيج من القوة والقدرة على التكيف والمرونة خطوة نحو روبوتات جوية قادرة على أداء مهام صيانة وتجميع عملية في أماكن يصعب أو يخطر على البشر الوصول إليها.
الاستشهاد: Zhu, M., Guo, Y., Gong, D. et al. Force sensorless interaction wrench estimation for neural-learning impedance control of a flying parallel robot with actuator saturation. Sci Rep 16, 12605 (2026). https://doi.org/10.1038/s41598-026-42788-2
الكلمات المفتاحية: الروبوتات الجوية, تعاون متعدد الطائرات بدون طيار, التحكم بالقوى, التحكم بالشبكات العصبية, التفاعل الفيزيائي