Clear Sky Science · sv
Sensorfri uppskattning av interaktionskraft för neuralt lärande impedansstyrning av en flygande parallellrobot med aktuatormättning
Robothjälpare som säkert kan röra vid världen
Luftburna robotar som inte bara kan flyga utan också skjuta, dra eller vrida föremål skulle en dag kunna inspektera broar, reparera kraftledningar eller montera konstruktioner på svåråtkomliga platser. Att göra flygande maskiner tillräckligt starka, precisa och säkra för att fysiskt vidröra omgivningen är dock mycket svårt. Denna artikel presenterar en ny styrmetod för en särskild typ av multi-drönarrobot som kan bära tyngre laster och interagera varsamt med miljön, utan tunga kraftsensorer och samtidigt inom motorns effektbegränsningar.
En flygande grupp som agerar som en stark robot
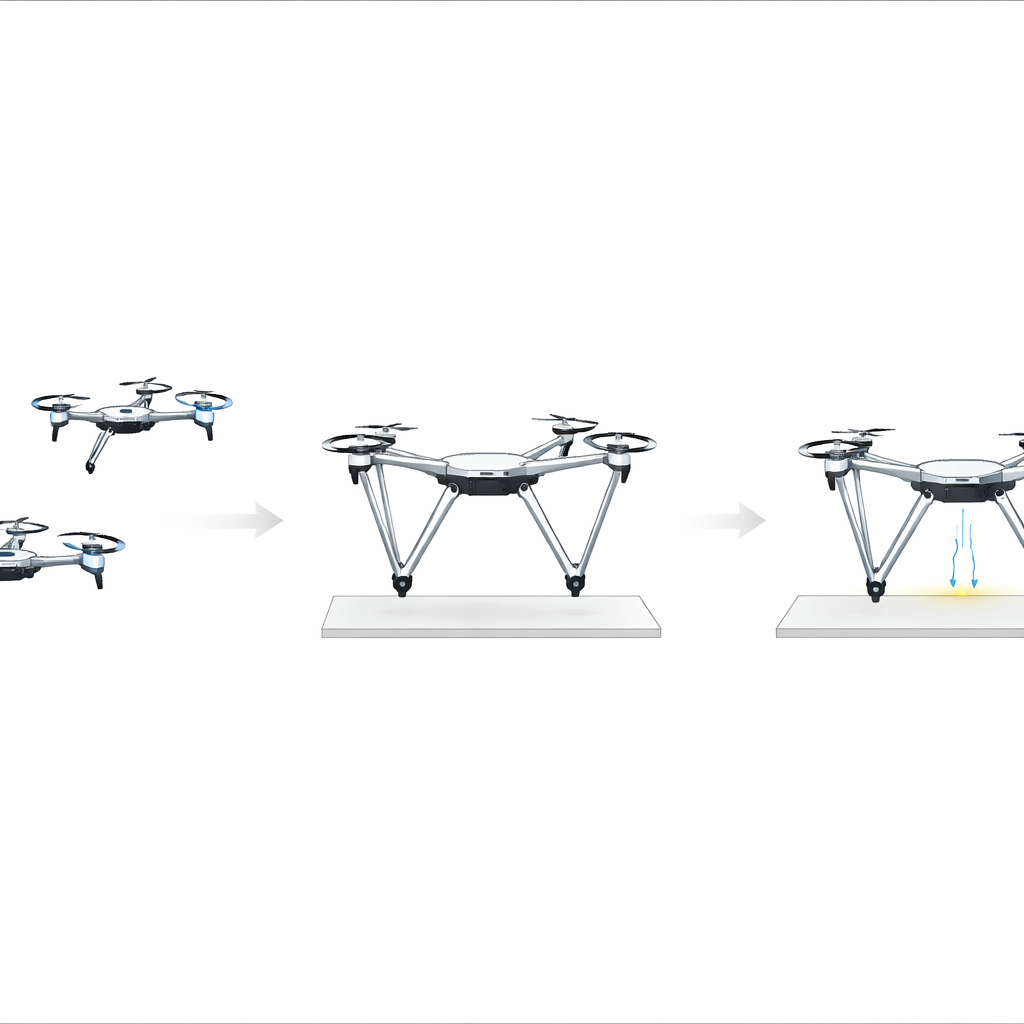
I stället för att montera en liten arm på en enda drönare studerar forskarna en ”flygande parallellrobot” byggd av tre quadrotorer kopplade med styva ben till en central rörlig plattform. Genom att samarbeta kan drönarna bära större nyttolaster och applicera krafter jämnare än ett enda fordon. Men denna konstruktion medför också allvarliga utmaningar: de krafter varje drönare kan generera är strikt begränsade, den övergripande rörelsen är komplex och roboten måste vara stabil när den träffas av vind eller trycker mot ytor som väggar eller tak.
Känna krafter utan tunga sensorer
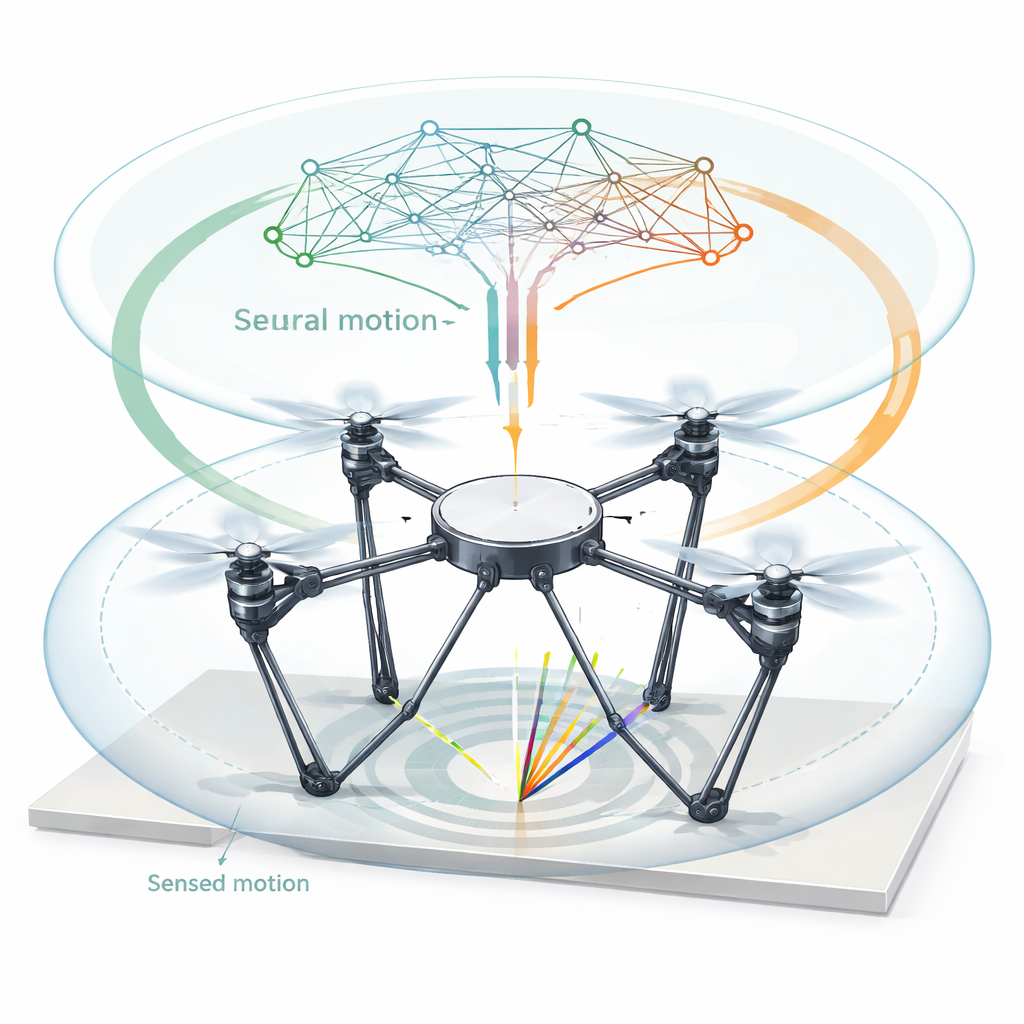
De flesta robotar som interagerar fysiskt med sin omgivning använder särskilda kraftsensorer vid kontaktpunkten. På en flygande maskin innebär extra sensorer mer vikt och kortare flygtider. För att undvika detta utformar författarna en ”wrench-observatör” som uppskattar kontaktkrafter och moment genom att observera hur robotens rörelse förändras som svar på drönarnas thrust. Denna observatör bygger på idén om generaliserad rörelsemängd: genom att kombinera robotens massa, rörelse och kända thrust-inputs rekonstruerar algoritmen det yttre tryck eller drag som verkar på plattformen. Ett inbyggt lågpassfilter jämnar ut mätbrus så att de uppskattade krafterna förblir tillförlitliga även när rörelsedata är imperfekta.
Lära en flygande robot att ge efter som en fjäder
För att hålla interaktionerna mjuka och förutsägbara använder teamet en metod som kallas impedansstyrning, vilket får roboten att uppträda som om den var kopplad till omgivningen via ett justerbart massa-fjäder-dämpare-system. I stället för att försöka hålla sin position styvt kan plattformen ”ge” vid kontakt, ungefär som en väl inställd fjädring. Att utforma ett sådant beteende är svårt när robotens verkliga dynamik bara är ungefär känd och drönarna lätt når sina thrustgränser. Författarna löser detta genom att inbädda ett lärandesystem baserat på radialbasisfunktions-neurala nätverk. Dessa nätverk approximerar kontinuerligt okända effekter såsom omodellerad aerodynamik och varierande nyttolaster, och en adaptiv lag härledd från Lyapunovs stabilitetsteori säkerställer att inlärningsprocessen inte destablerar roboten.
Hålla stabiliteten när motorerna når sina gränser
En viktig praktisk risk är aktuatormättning: varje rotor kan bara trycka så hårt. Om regulatorn begär mer thrust än vad motorerna kan leverera kan mismatchen orsaka stora följningsfel eller till och med kontrollförlust. I stället för att omforma alla variabler till ett komplicerat nytt koordinatsystem introducerar författarna ett hjälpande dynamiskt system som specifikt kompenserar skillnaden mellan den kommenderade wrench och den thrust som faktiskt är uppnåelig. Denna extra slinga fungerar tillsammans med impedansregulatorn och de neurala nätverken för att hålla det övergripande beteendet stabilt, även när motorerna arbetar vid sina gränser.
Sätta den nya styrmetoden på prov
Forskarlaget utvärderar sin metod med en detaljerad virtuell prototyp av den flygande parallellroboten byggd i en mekanisk simuleringsmiljö och kopplad i realtid till en styrmodell. De utsätter systemet för mätbrus, nyttolastförändringar och strikta thrustgränser för att efterlikna verkliga förhållanden. Den nya regulatorn jämförs med två alternativ: en standard proportional-derivativ regulator och en enklare impedansregulator som också använder uppskattade krafter men saknar neuralt lärande och mättnadskompensering. Både vid friflygspårning och kontaktuppgifter mot en virtuell yta levererar den föreslagna metoden de minsta positions- och orienteringsfelen, den mest exakta kraftregleringen och det mest stabila beteendet, allt medan motorkommandon hålls inom säkra gränser.
Varför detta är viktigt för framtidens flygande arbetare
I vardagliga termer visar arbetet hur ett team av drönare kan samordnas för att agera som en enda, kraftfull och överraskande mjuk robothand i luften. Genom att uppskatta krafter utan extra sensorer, lära sig osäkra dynamiker i farten och respektera motorernas fysiska begränsningar gör det föreslagna styrschemat att den flygande parallellroboten kan röra vid och manipulera sin omgivning säkert och tillförlitligt. Denna kombination av styrka, anpassningsförmåga och eftergivlighet är ett steg mot luftburna robotar som kan utföra praktiskt underhålls‑ och monteringsarbete på platser som är svåra eller farliga för människor att nå.
Citering: Zhu, M., Guo, Y., Gong, D. et al. Force sensorless interaction wrench estimation for neural-learning impedance control of a flying parallel robot with actuator saturation. Sci Rep 16, 12605 (2026). https://doi.org/10.1038/s41598-026-42788-2
Nyckelord: luftburna robotar, samarbete mellan flera drönare, kraftstyrning, neuralt nätverksstyrning, fysisk interaktion