Clear Sky Science · fr
Estimation du wrench d’interaction sans capteur de force pour le contrôle d’impédance par apprentissage neuronal d’un robot parallèle volant avec saturation des actionneurs
Aides robotiques capables de toucher le monde en toute sécurité
Des robots aériens qui peuvent non seulement voler mais aussi pousser, tirer ou tordre des objets pourraient un jour inspecter des ponts, réparer des lignes électriques ou assembler des structures dans des lieux difficiles d’accès. Pourtant, rendre des aéronefs suffisamment puissants, précis et sûrs pour toucher physiquement leur environnement est extrêmement complexe. Cet article présente une nouvelle méthode de commande pour un type particulier de robot multi‑drone capable de transporter des charges plus lourdes et d’interagir avec douceur avec l’environnement, sans capteurs de force encombrants et tout en restant dans les limites de puissance de ses moteurs.
Une équipe volante agissant comme un seul robot puissant
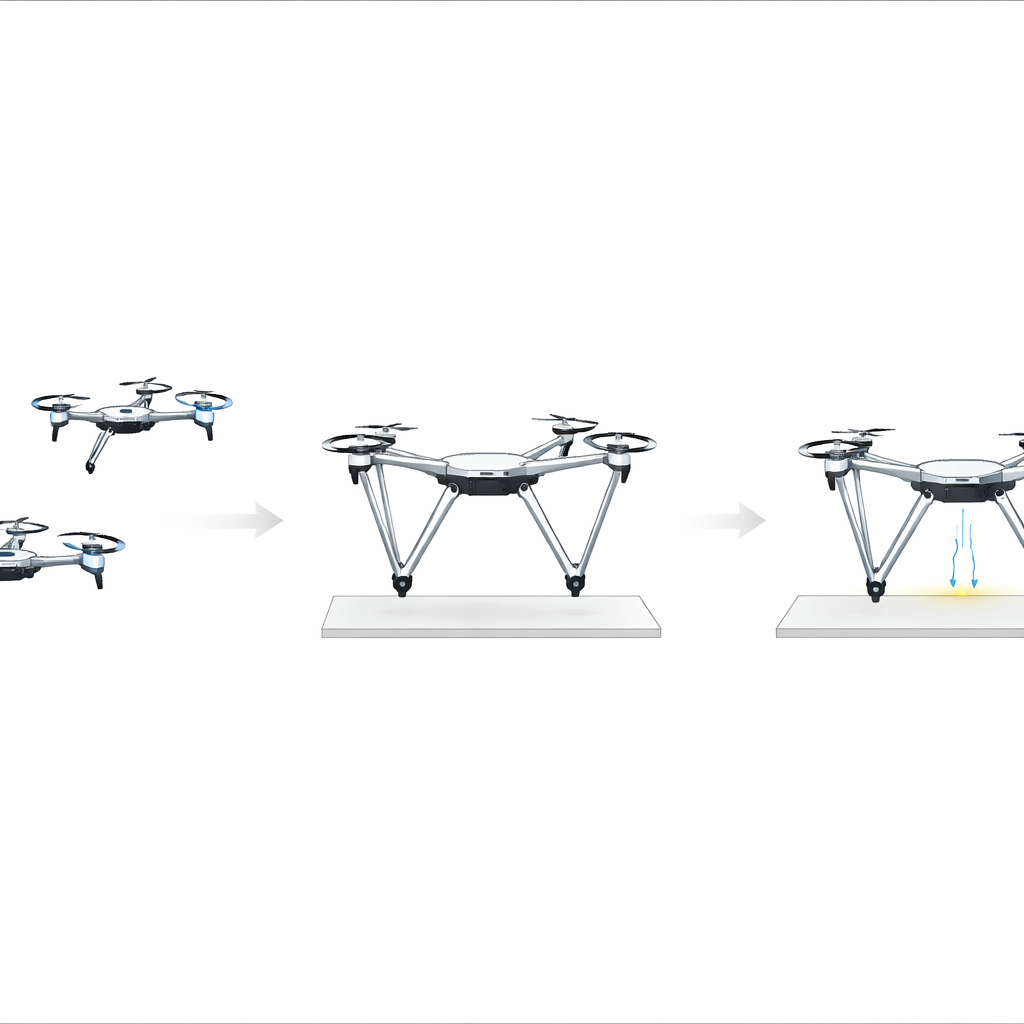
Plutôt que de monter un petit bras sur un seul drone, les chercheurs étudient un « robot parallèle volant » composé de trois quadrotors reliés par des jambes rigides à une plateforme mobile centrale. En travaillant ensemble, les drones peuvent supporter des charges plus importantes et appliquer des forces de manière plus homogène qu’un véhicule seul. Cependant, ce concept pose aussi des défis sérieux : les forces que chaque drone peut générer sont strictement limitées, le mouvement global est complexe, et le robot doit rester stable lorsqu’il subit le vent ou qu’il pousse contre des surfaces comme des murs ou des plafonds.
Sentir les forces sans ajouter de capteurs lourds
La plupart des robots qui interagissent physiquement avec leur environnement utilisent des capteurs de force dédiés au point de contact. Sur une machine volante, des capteurs supplémentaires signifient davantage de poids et des temps de vol réduits. Pour éviter cela, les auteurs conçoivent un « observateur de wrench » qui estime les forces et moments de contact en observant comment le mouvement du robot change en réponse à la poussée des drones. Cet observateur repose sur l’idée de quantité de mouvement généralisée : en combinant la masse du robot, son mouvement et les commandes de poussée connues, l’algorithme reconstruit la poussée externe agissant sur la plateforme. Un filtre passe‑bas intégré atténue le bruit de mesure afin que les forces estimées restent fiables même lorsque les données de mouvement sont imparfaites.
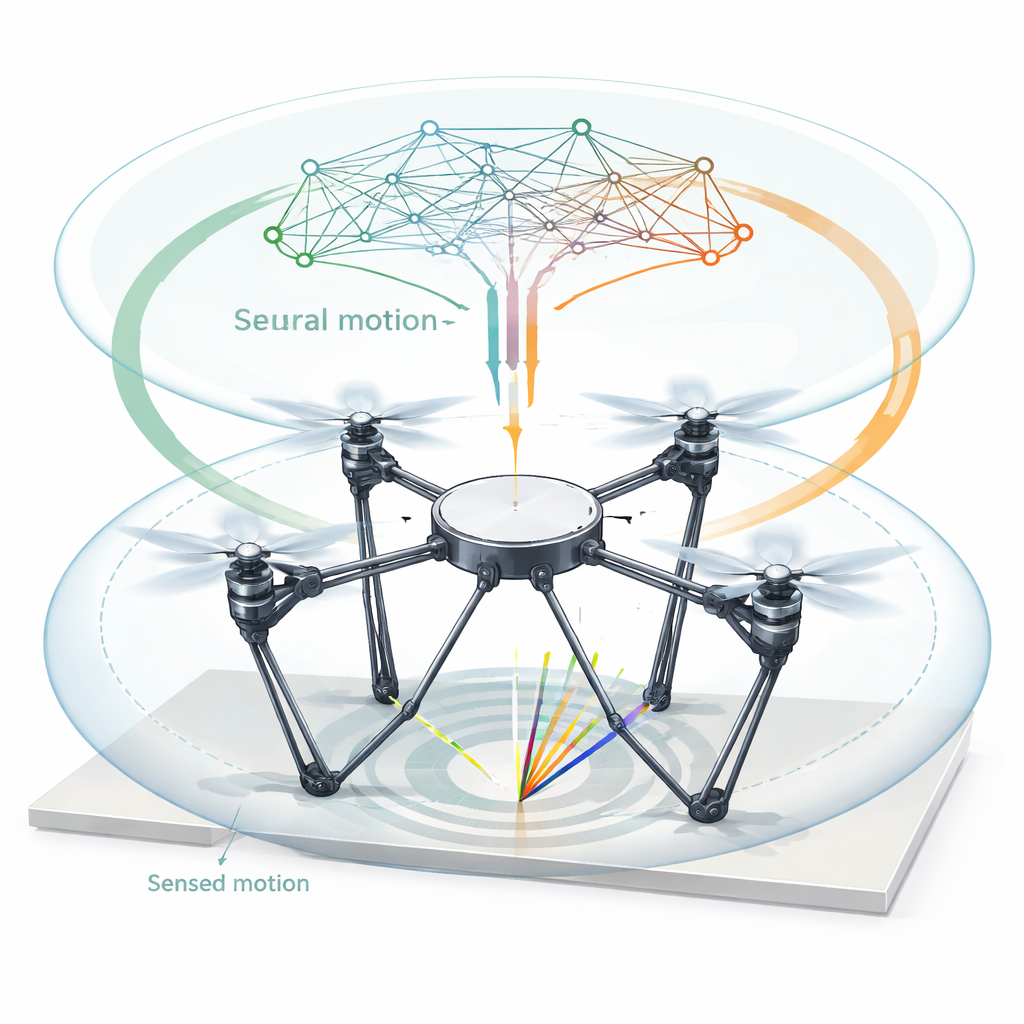
Apprendre au robot volant à céder comme un ressort
Pour maintenir des interactions douces et prévisibles, l’équipe utilise une approche dite de contrôle par impédance, qui fait se comporter le robot comme s’il était connecté à l’environnement par un système masse‑ressort‑amortisseur réglable. Plutôt que d’essayer de maintenir sa position de manière rigide, la plateforme peut « céder » en réponse au contact, à la manière d’une suspension bien réglée. Concevoir un tel comportement est délicat lorsque la dynamique réelle du robot n’est connue qu’approximativement et que les drones peuvent rapidement atteindre leurs limites de poussée. Les auteurs s’attaquent à ce problème en intégrant un système d’apprentissage basé sur des réseaux de base radiale. Ces réseaux approchent en continu des effets inconnus tels que l’aérodynamique non modélisée et les variations de charge utile, et une loi d’adaptation dérivée de la théorie de stabilité de Lyapunov garantit que le processus d’apprentissage ne déstabilise pas le robot.
Rester stable lorsque les moteurs atteignent leurs limites
Un risque pratique majeur est la saturation des actionneurs : chaque rotor ne peut fournir qu’une poussée limitée. Si le contrôleur demande plus de poussée que ce que les moteurs peuvent fournir, le désaccord peut provoquer des erreurs de suivi importantes voire une perte de contrôle. Plutôt que de transformer toutes les variables dans un système de coordonnées complexe, les auteurs introduisent un système dynamique auxiliaire qui compense spécifiquement la différence entre le wrench commandé et la poussée réellement réalisable. Cette boucle supplémentaire fonctionne de concert avec le contrôleur d’impédance et les réseaux neuronaux pour maintenir la stabilité globale, même lorsque les moteurs fonctionnent à leurs limites.
Mettre à l’épreuve la nouvelle méthode de commande
Les chercheurs évaluent leur approche à l’aide d’un prototype virtuel détaillé du robot parallèle volant, construit dans un environnement de simulation mécanique et relié en temps réel à un modèle de commande. Ils soumettent le système au bruit de mesure, à des variations de charge utile et à des limites strictes de poussée pour reproduire des conditions réalistes. Le nouveau contrôleur est comparé à deux alternatives : un contrôleur proportionnel‑dérivé standard et un contrôleur d’impédance plus simple qui utilise également des forces estimées mais sans apprentissage neuronal ni compensation de saturation. Tant en suivi de trajectoire en vol libre que lors de tâches de contact contre une surface virtuelle, la méthode proposée délivre les plus petites erreurs de position et d’orientation, la régulation de force la plus précise et le comportement le plus stable, tout en maintenant les commandes moteurs dans des limites sûres.
Pourquoi cela compte pour les futurs ouvriers volants
Concrètement, ce travail montre comment une équipe de drones peut être coordonnée pour se comporter comme une seule main robotique aérienne, puissante et étonnamment délicate. En estimant les forces sans capteurs supplémentaires, en apprenant les dynamiques incertaines en temps réel et en respectant les limites physiques des moteurs, le schéma de commande proposé permet au robot parallèle volant de toucher et de manipuler son environnement de façon sûre et fiable. Cette combinaison de puissance, d’adaptabilité et de conformité constitue une avancée vers des robots aériens capables d’effectuer des tâches pratiques de maintenance et d’assemblage dans des lieux difficiles ou dangereux pour l’homme.
Citation: Zhu, M., Guo, Y., Gong, D. et al. Force sensorless interaction wrench estimation for neural-learning impedance control of a flying parallel robot with actuator saturation. Sci Rep 16, 12605 (2026). https://doi.org/10.1038/s41598-026-42788-2
Mots-clés: robots aériens, coopération multi-drone, commande de force, contrôle par réseau neuronal, interaction physique