Clear Sky Science · zh
基于激光跟踪仪与外置编码器的5自由度混合机器人位姿误差实时预测与补偿
为何机器人精度至关重要
工业机器人如今被要求像高端机床那样进行钻孔、铣削和装配。然而它们的机械臂会弯曲、关节会变形、温度会漂移,这些都会把刀具从理想轨迹推离。本文展示了如何通过结合两种不同的测量系统与一种巧妙的数学拟合方法,在实时中保持复杂的五轴混合机器人命中目标。
两种监测机器人的方式
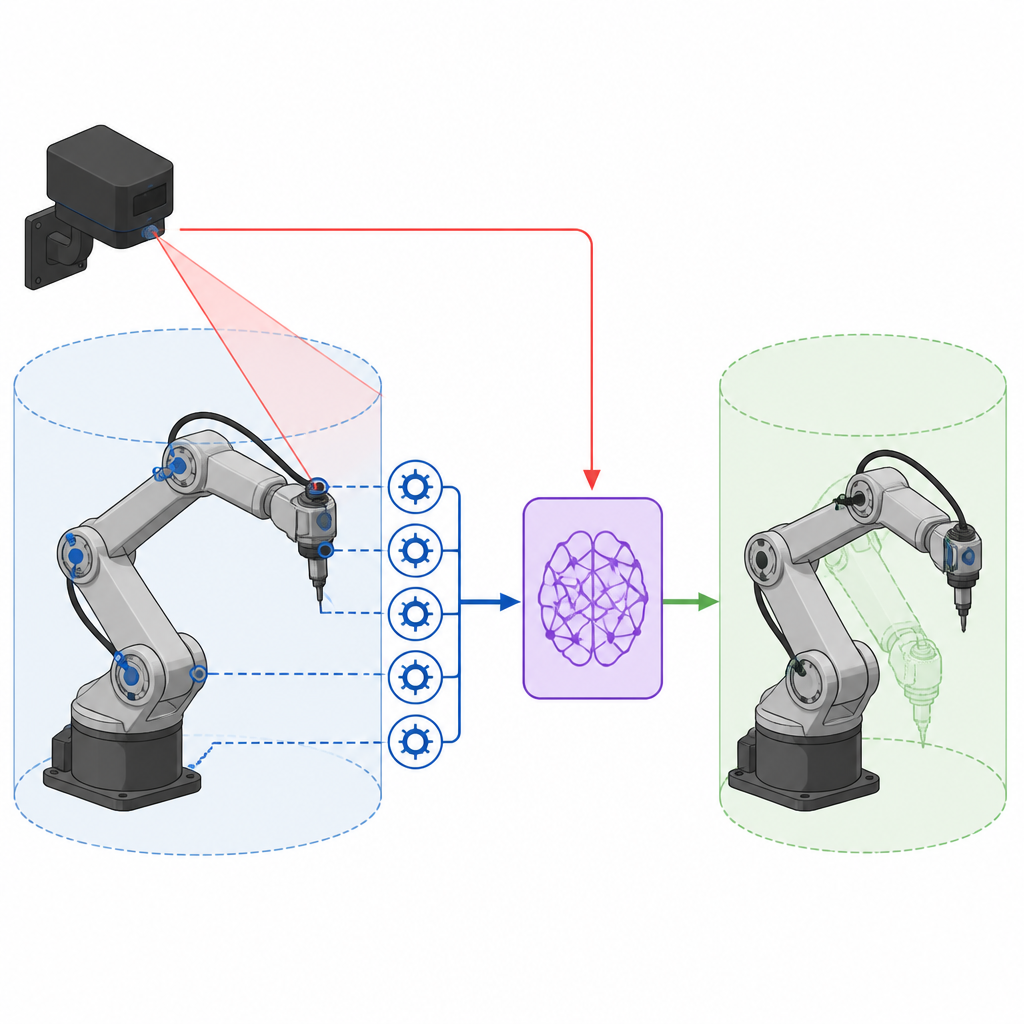
作者研究了一种名为TriMule的特殊五自由度加工机器人,它将并联与串联关节混合,用以在高柱状工作空间内移动切削刀具。他们比较了两种跟踪刀具实际位置的方法。一种是在机器人外部放置的激光跟踪仪,可用极高精度定位反射靶,但速度较慢且需受控条件下测量。另一种是在关节上直接固定的一串紧凑编码器,它们在实际加工中实时读取角度与滑移,但通过机器人的几何关系间接推断刀具位置,因此自身存在安装和结构误差。
融合离线与在线视角
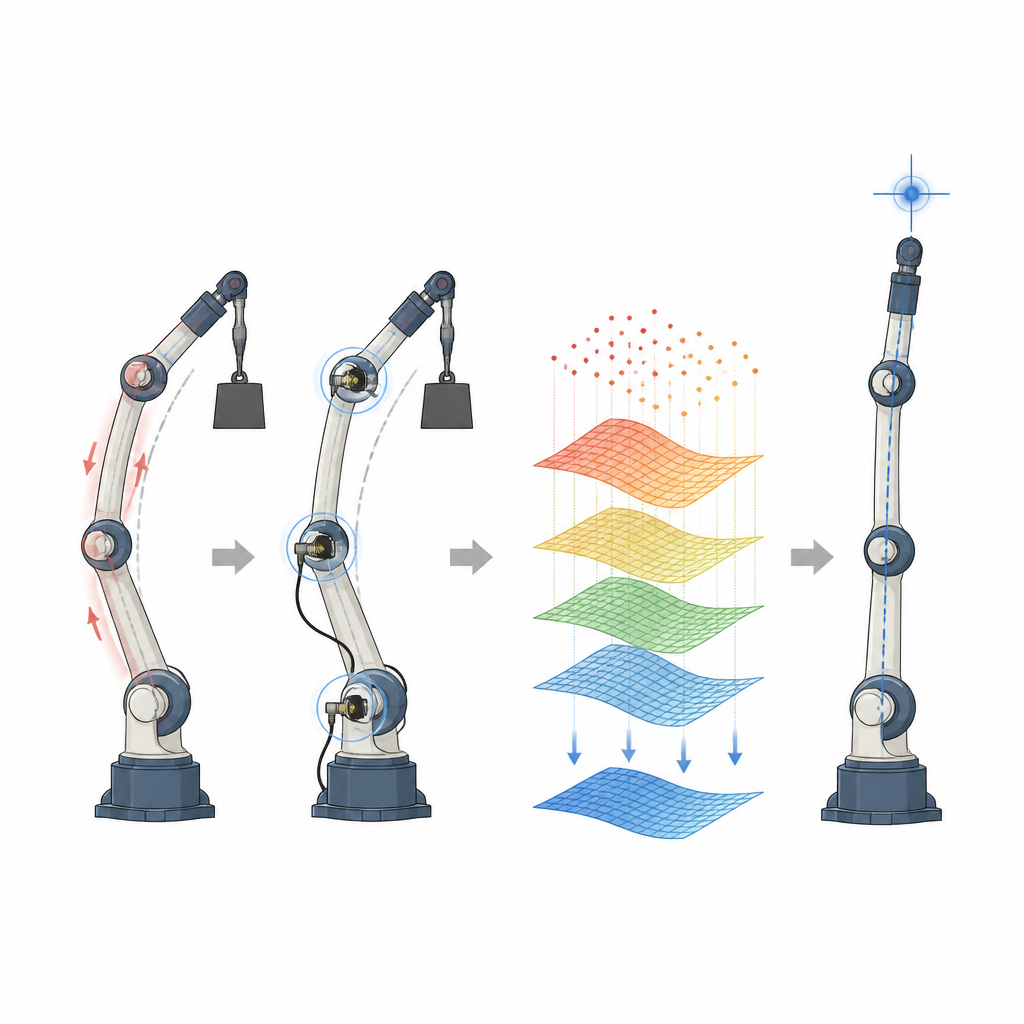
单独使用时,每种测量方式都有不足。激光跟踪仪能精确地看到刀具,但仅在有限姿态下、且通常没有切削力或变化载荷条件下测量。编码器链能连续监测机器人,但无法匹配激光的绝对精度,且受传感器安装方式影响。本文的关键思想是将真实的位姿误差视为静态部分与动态部分之和:静态部分由激光在离线采样时捕获,动态部分随载荷与扰动而变化。通过比较采样期间编码器的读数与实际加工时的读数,方法可以估计额外出现的误差并进行校正。
用平滑曲面来预测误差
为在整个工作空间中实用地实现这种融合,团队采用了一种称为移动最小二乘(moving least squares)的技术。他们并不为每个关节和连杆建立详尽的物理误差模型,而是把采样位置的机器人位姿视为带已知误差的点。移动最小二乘通过这些离散的误差数据拟合出平滑曲面,使用局部加权使得近邻样本对预测的影响大于远处样本。对三个位置分量和三个姿态分量使用相同的拟合函数形式,从而简化了机器人数控系统内的计算。
在控制器内的实时校正
加工过程中,控制系统以小时间步插值被指令的刀具路径。提前两个插值周期,它会查询拟合的误差曲面来预测即将到达姿态的静态误差,并将其与当前姿态下来自编码器的最新动态误差估计相结合。所得校正被应用到指令位姿上,然后再进行逆运动学求解与关节层伺服控制。通过这种方式,刀具路径在笛卡尔空间中悄然被修正,而更快的关节控制器保持不变,从而维持系统稳定性。
方法的性能如何
研究人员通过详尽实验验证了他们的方法。首先,他们在柱状工作空间中采样了96个点,使用激光跟踪仪与编码器链同时测量刀具位姿。他们发现,仅靠编码器的方法不如激光精确,主要因为编码器测量的是关节运动而非直接的刀具位姿。接着,他们测试了改变刀尖载荷如何影响定位。当载荷减小,激光显示出标准离线标定无法纠正的小但重要的位移。通过将离线激光数据与在线编码器读数结合,并采用所提出的公式与移动最小二乘拟合,该方法捕捉了大约61%的动态误差,并在恒定载荷下将预测误差与实际误差之间的差异控制在大约5%之内。
这对未来机器人的意义
对非专业读者而言,结论是作者找到了一种实用的方法,在机器人工作时保持柔性机械臂的精度。通过用精确但缓慢的仪器教会机器人其静态缺陷,然后让廉价编码器追踪这些缺陷在真实力作用下如何变化,他们能够在实时中把刀具引导得更接近应到之处。这一策略可被推广到其他机器人和机床,为在无需构建绝对刚性机器的情况下实现更高精度的自动化制造提供了一条可行路径。
引用: Guo, H., Li, G. & Liu, S. Pose error real-time prediction and compensation of a 5-DOF hybrid robot based on laser tracker and externally mounted encoders. Sci Rep 16, 15365 (2026). https://doi.org/10.1038/s41598-026-42162-2
关键词: 机器人精度, 误差补偿, 激光跟踪仪, 外置编码器, 混合加工机器人