Clear Sky Science · ja
レーザートラッカーと外付けエンコーダに基づく5自由度ハイブリッドロボットの姿勢誤差リアルタイム予測と補償
なぜロボット精度が重要か
産業用ロボットは現在、高級工作機械と同じ精度で穴あけ、フライス加工、組立を行うことが求められている。しかしアームはたわみ、関節はしなり、温度変化が生じ、これらが工具を理想軌道からずらしてしまう。本稿は、二つの異なる計測システムと巧みな数値フィッティングを組み合わせることで、複雑な五軸ハイブリッドロボットをリアルタイムでターゲットに保つ方法を示す。
ロボットを監視する二つの方法
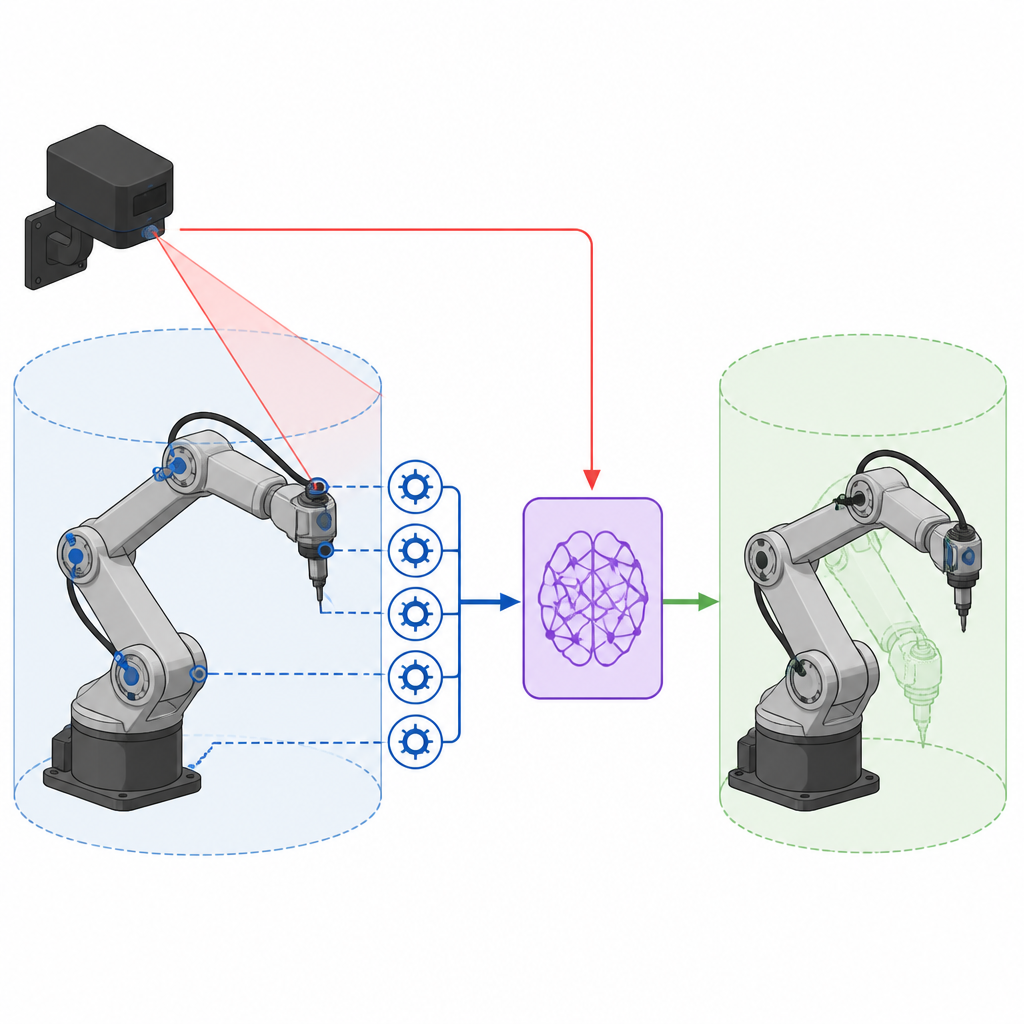
著者らはTriMuleと呼ばれる特殊な5自由度の加工ロボットを研究している。これは並列・直列の関節を混ぜ合わせ、高さのある円筒状作業空間内で切削工具を動かす。工具の実際の位置を追跡する方法として二つを比較する。一つはロボット外部に配置されたレーザートラッカーで、反射ターゲットを非常に高精度に測定できるが、速度が遅く管理された条件下でのみ使える。もう一つは関節に直接取り付けたコンパクトなエンコーダ列で、実際の加工中に角度やスライドをリアルタイムで読み取るが、ロボットの幾何に基づいて間接的に工具位置を推定するため、取り付けや構造に由来する誤差を含む。
オフライン視点とオンライン視点の融合
単独ではどちらの計測も不十分だ。レーザートラッカーは工具を精密に捉えるが、サンプリングできる姿勢は限られ、通常は切削力や負荷変動がない条件での測定になる。エンコーダ列は連続監視が可能だが、レーザーの絶対精度には及ばず、センサの取り付け状況の影響を受ける。本研究の重要な着想は、真の姿勢誤差をオフライン測定で捕らえられる静的部分と、荷重や外乱で変化する動的部分の和として扱うことにある。サンプリング時のエンコーダ値と実作業時のエンコーダ値を比較することで、どれだけ追加の誤差が現れたかを推定し、それを補正できる。
誤差を予測するための滑らかな面の利用
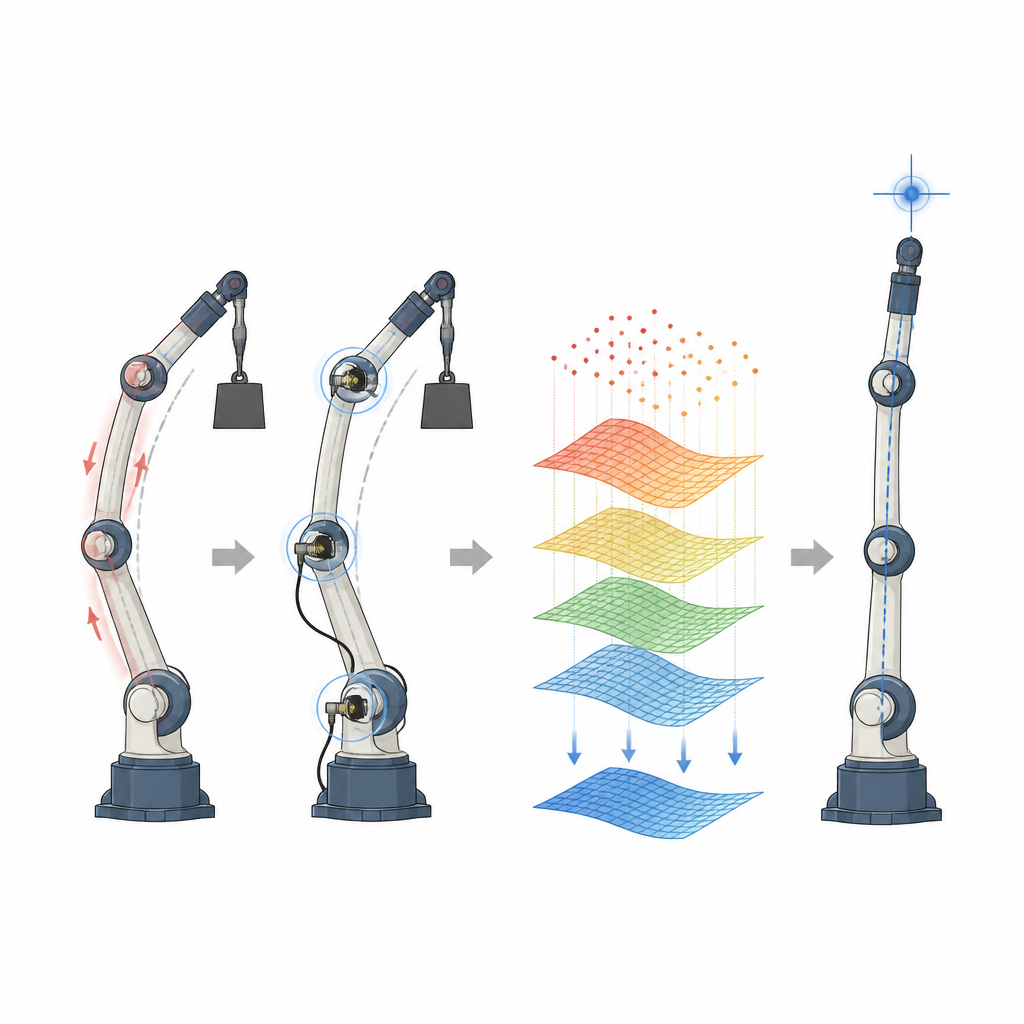
作業空間全体でこの融合を実用化するため、チームは移動最小二乗法という手法を用いる。各関節やリンクの詳細な物理誤差モデルを構築する代わりに、サンプリングした姿勢を既知の誤差を伴う点として扱う。移動最小二乗法はこうした散在する誤差データに滑らかな面をフィットさせ、局所的重み付けを用いることで近傍のサンプルが遠方のサンプルより強く予測に影響するようにする。位置の三方向、姿勢の三方向すべてに対して同じ形状のフィッティング関数を使うため、ロボットの数値制御系内での計算が簡素化される。
コントローラ内でのリアルタイム補正
加工中、制御系は指令された工具軌跡を短い時間ステップで補間する。二つ先の補間サイクルで、フィットした誤差面に問い合わせて今後の姿勢に対する静的誤差を予測し、これに現在の姿勢での最新のエンコーダ由来の動的誤差推定を組み合わせる。得られた補正は逆運動学と関節レベルのサーボ制御が動く前に指令姿勢に適用される。こうして、より高速に動作する関節制御を変えずに、デカルト空間上で工具軌跡が静かに再形成され、システムの安定性が維持される。
手法の有効性
研究者らは詳細な実験で手法を検証した。まず、円筒状作業空間全体で96点をサンプリングし、レーザートラッカーとエンコーダ列の両方で工具姿勢を測定した。エンコーダ単独の手法は、エンコーダが関節運動を測るものであって工具姿勢を直接測定しないため、主にレーザーより精度が劣ることが分かった。次に、工具先端の負荷を変化させたときの位置変化を試験した。負荷が減少すると、レーザーは標準的なオフライン較正では補正できない小さいが重要なシフトを明らかにした。提案された式と移動最小二乗法によるフィッティングを通じてオフラインのレーザーデータとオンラインのエンコーダ読みを組み合わせることで、これらの動的誤差の約61%をとらえ、一定荷重下では予測誤差と実際の誤差の差を約5%以内に保った。
将来のロボットにとっての意味
一般読者にとっての結論は、著者らが稼働中の柔軟なロボットアームを実用的に正確に保つ方法を見いだしたということである。精密だが遅い計測器でロボットの静的な欠点を学習させ、安価なエンコーダで実際の力の下でそれらの欠点がどう変化するかを追跡させることで、工具を所望の位置により近づけることができる。この戦略は他のロボットや工作機械にも適用でき、完全に剛性の高い機械を作ることなく、より高精度な自動化製造への道を提供する可能性がある。
引用: Guo, H., Li, G. & Liu, S. Pose error real-time prediction and compensation of a 5-DOF hybrid robot based on laser tracker and externally mounted encoders. Sci Rep 16, 15365 (2026). https://doi.org/10.1038/s41598-026-42162-2
キーワード: ロボット精度, 誤差補償, レーザートラッカー, 外付けエンコーダ, ハイブリッド加工ロボット