Clear Sky Science · en
Pose error real-time prediction and compensation of a 5-DOF hybrid robot based on laser tracker and externally mounted encoders
Why robot accuracy matters
Industrial robots are now asked to drill, mill and assemble with the same precision as high-end machine tools. Yet their arms bend, joints flex and temperatures drift, all of which nudge the tool away from its ideal path. This paper shows how to keep a complex five-axis hybrid robot on target in real time by combining two different measurement systems and a clever mathematical fitting method.
Two ways to watch a robot
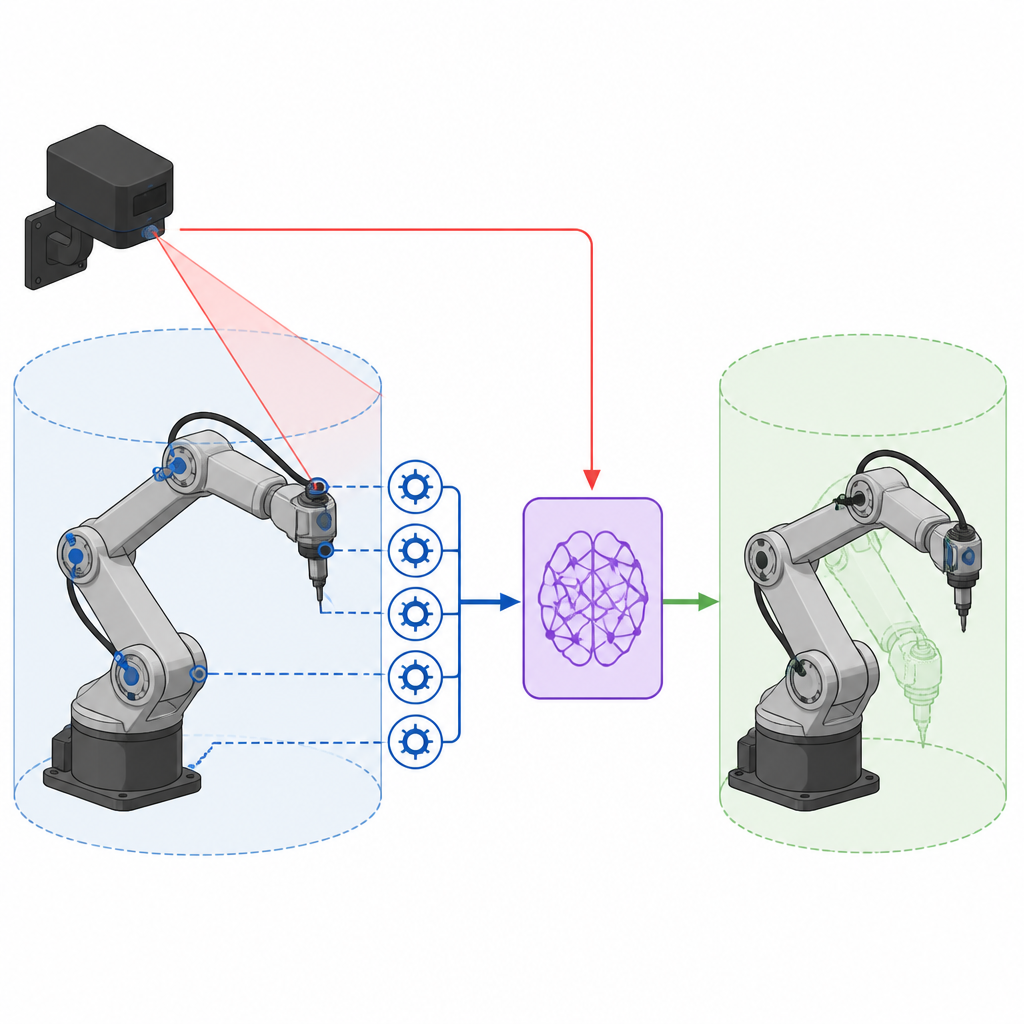
The authors study a special five degree of freedom machining robot called TriMule, which mixes parallel and serial joints to move a cutting tool through a tall cylindrical workspace. They compare two ways of tracking where the tool actually is. One is a laser tracker placed outside the robot that can locate reflective targets with extremely high accuracy, but only slowly and under controlled conditions. The other is a chain of compact encoders bolted directly to the joints that read angles and slides in real time during real machining, but infer the tool position indirectly through the robot’s geometry and therefore carry their own installation and structural errors.
Blending offline and online views
On their own, each measurement approach falls short. The laser tracker sees the tool precisely, but only at a limited number of poses and typically without cutting forces or changing loads. The encoder chain monitors the robot continuously, but cannot match the laser’s absolute accuracy and is affected by how the sensors are mounted. The key idea of this work is to treat the true pose error as the sum of a static part, captured by the laser during an offline sampling campaign, and a dynamic part that changes with load and disturbance. By comparing what the encoders say during sampling and what they say during real work, the method can estimate how much additional error has appeared and correct for it.
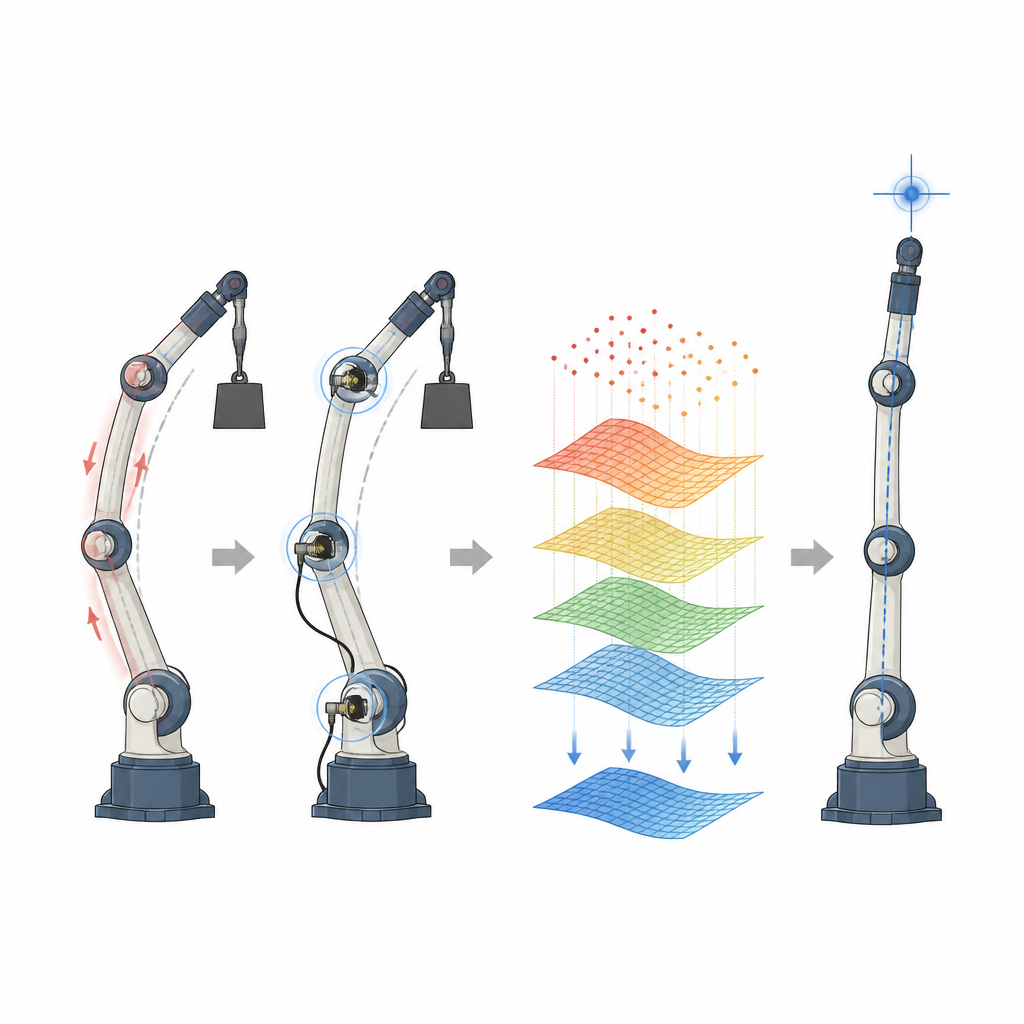
Using smooth surfaces to predict errors
To make this fusion practical across the whole workspace, the team uses a technique called moving least squares. Instead of building a detailed physical error model of every joint and link, they treat the robot poses at sampled locations as points in space with known errors. Moving least squares then fits smooth surfaces through these scattered error data, using local weighting so that nearby samples influence the prediction more than distant ones. The same shape of fitted function is used for all three position directions and all three orientation directions, which simplifies the computation inside the robot’s numerical control system.
Real-time corrections inside the controller
During machining, the control system interpolates the commanded tool path in small time steps. Two interpolation cycles ahead, it queries the fitted error surfaces to predict the static error at an upcoming pose and combines this with the latest encoder-based estimate of dynamic error at the current pose. The resulting correction is applied to the commanded pose before inverse kinematics and joint-level servo control run. In this way, the tool path is quietly reshaped in Cartesian space while the faster joint controllers proceed unchanged, maintaining system stability.
How well the method works
The researchers validate their approach through detailed experiments. First, they sample 96 points throughout the cylindrical workspace, measuring tool pose with both the laser tracker and the encoder chain. They find that the encoder-based method alone is less accurate than the laser, mainly because encoders measure joint motion rather than tool pose directly. Next, they test how changing the load at the tool tip alters positioning. When load is reduced, the laser reveals small but important shifts that standard offline calibration cannot correct. By combining offline laser data with online encoder readings through the proposed formula and moving least squares fitting, the method captures about 61 percent of these dynamic errors and keeps the difference between predicted and actual errors within about 5 percent under constant load.
What this means for future robots
For a lay reader, the bottom line is that the authors have found a practical way to keep a flexible robot arm honest while it works. By teaching the robot about its static imperfections using a precise but slow instrument, and then letting inexpensive encoders track how those imperfections change under real forces, they can steer the tool closer to where it should be in real time. This strategy could be adapted to other robots and machine tools, offering a path toward more accurate automated manufacturing without having to build perfectly rigid machines.
Citation: Guo, H., Li, G. & Liu, S. Pose error real-time prediction and compensation of a 5-DOF hybrid robot based on laser tracker and externally mounted encoders. Sci Rep 16, 15365 (2026). https://doi.org/10.1038/s41598-026-42162-2
Keywords: robot accuracy, error compensation, laser tracker, external encoders, hybrid machining robot