Clear Sky Science · ar
التنبؤ بالخطأ في الوضع الزمني الحقيقي وتعويضه لروبوت هجين بخمس درجات حرية استناداً إلى متتبع ليزري ومشفرات مثبتة خارجياً
لماذا تهم دقة الروبوت
تُطلب الآن من الروبوتات الصناعية أن تثقب وتفَرز وتجمّع بدقة تضاهي أدوات الآلات عالية المستوى. ومع ذلك، تنحني أذرعها، وتلين مفاصلها، وتتغير درجات الحرارة، وكل ذلك يدفع الأداة بعيدًا عن مسارها المثالي. تُظهر هذه الورقة كيفية إبقاء روبوت هجين معقد بخمس محاور على الهدف في الزمن الحقيقي من خلال الجمع بين نظامي قياس مختلفين وطريقة تركيب رياضية ذكية.
طريقتان لمراقبة الروبوت
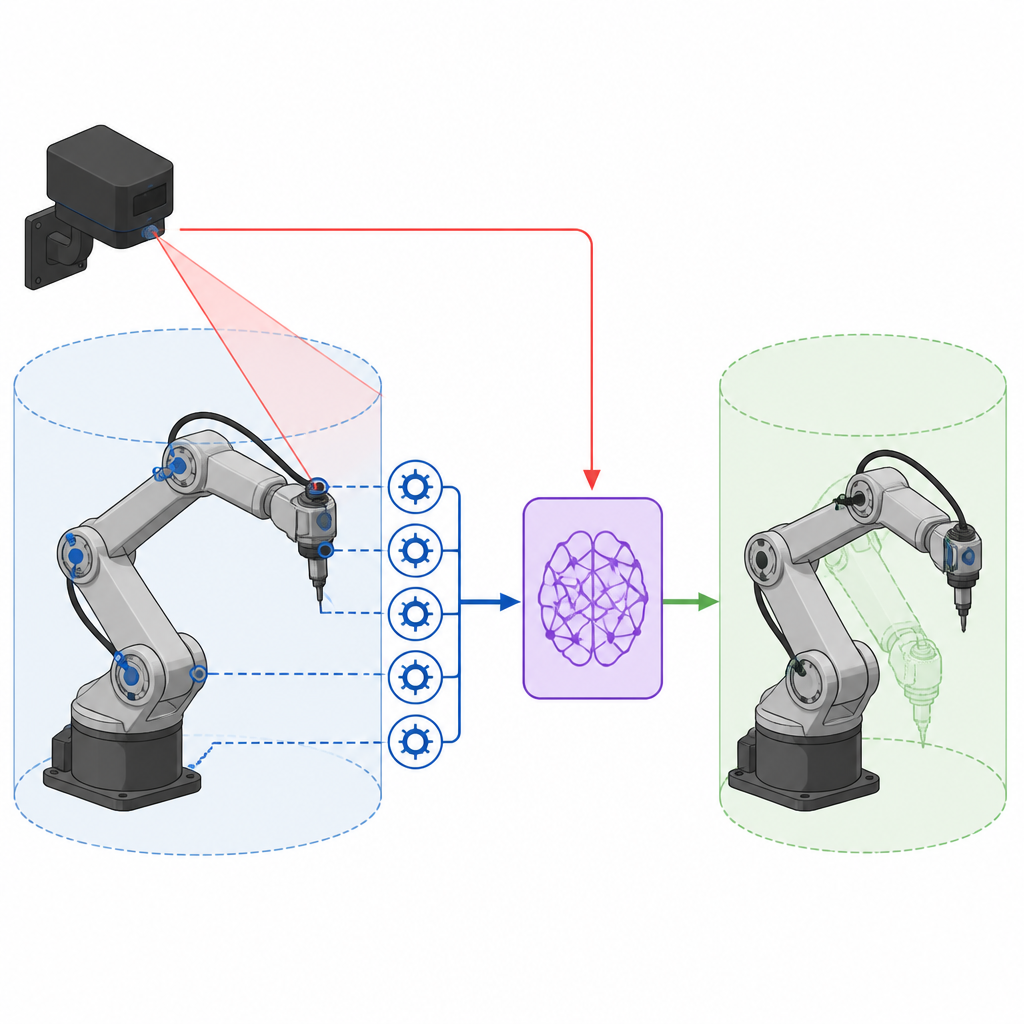
يدرس المؤلفون روبوتًا تشغيليًا خاصًا بخمس درجات حرية يسمى TriMule، والذي يمزج مفاصل متوازية ومتسلسلة لتحريك أداة قطع عبر حيز عمل أسطواني مرتفع. يقارنون طريقتين لتتبع مكان وجود الأداة فعليًا. الأولى هي متتبع ليزري موضوع خارج الروبوت يمكنه تحديد أهداف عاكسة بدقة فائقة، لكنه يعمل ببطء وتحت شروط مسيطر عليها. الأخرى سلسلة من المشفرات المدمجة المثبتة مباشرة على المفاصل التي تقرأ الزوايا والحركات الانزلاقية في الزمن الحقيقي أثناء التشغيل الفعلي، لكنها تستنتج موقع الأداة بشكل غير مباشر عبر هندسة الروبوت وبالتالي تحمل أخطاء تركيبية وبنيوية خاصة بها.
دمج الرؤى غير المتصلة والآنية
بمفردها، كل طريقة قياس لها حدود. يرى المتتبع الليزري الأداة بدقة، لكنه فقط عند عدد محدود من الوضعيات وعادةً بدون قوى قطع أو تغيّر في الأحمال. تراقب سلسلة المشفرات الروبوت باستمرار، لكنها لا تستطيع مضاهاة دقة المتتبع المطلقة وتتأثر بكيفية تركيب الحساسات. الفكرة الأساسية في هذا العمل هي اعتبار خطأ الوضع الحقيقي مجموع جزأين: جزء ثابت تلتقطه الليزر أثناء حملة عينات غير متصلة، وجزء ديناميكي يتغير مع الحمل والاضطرابات. بمقارنة ما تشير إليه المشفرات أثناء العينة وما تشير إليه أثناء العمل الفعلي، يمكن للطريقة تقدير مقدار الخطأ الإضافي وتصحيحه.
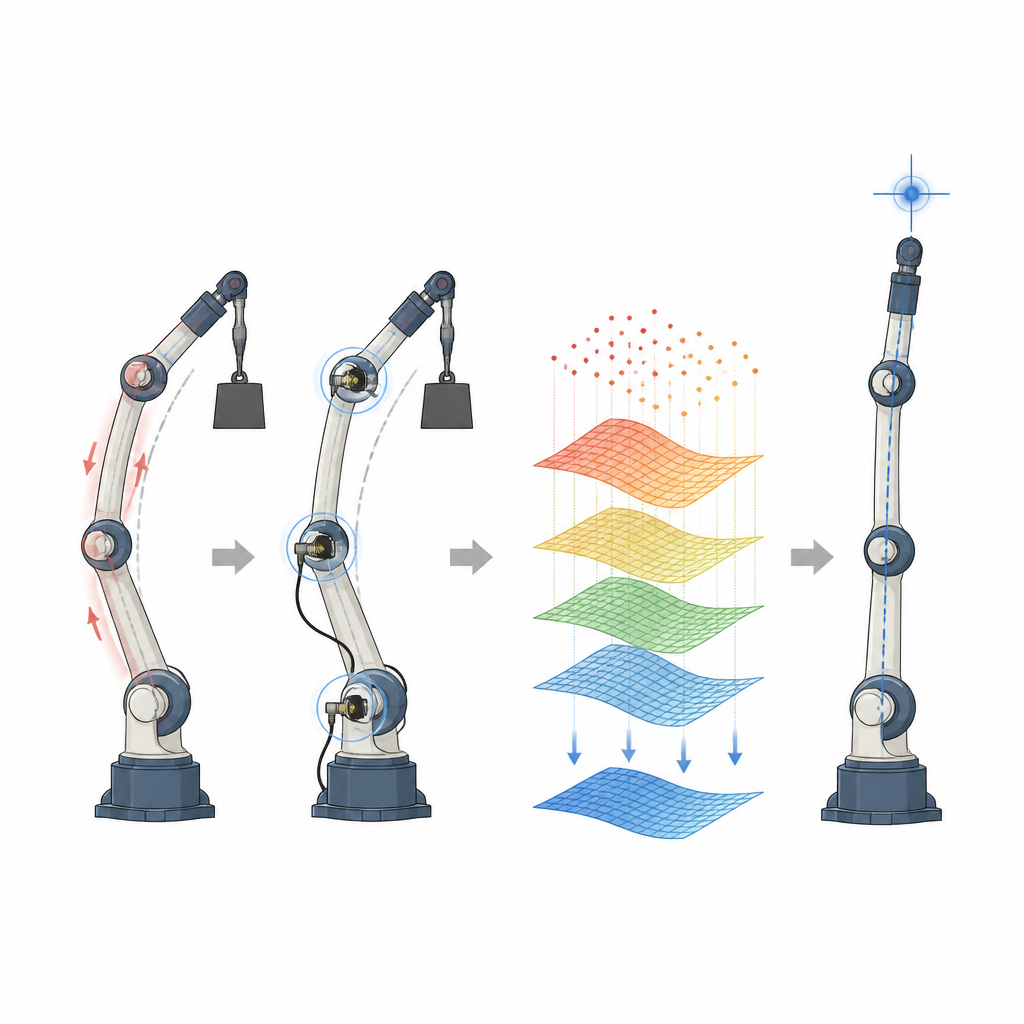
استخدام أسطح ناعمة لتوقع الأخطاء
لجعل هذا الدمج عمليًا عبر كامل حيز العمل، يستخدم الفريق تقنية تسمى المربعات الصغرى المتحركة. بدلًا من بناء نموذج فيزيائي مفصل لخطأ كل مفصل ووصلة، يعاملون وضعيات الروبوت في مواقع العينة كنقاط في الفضاء ذات أخطاء معروفة. تقوم المربعات الصغرى المتحركة بعدها بتمرير أسطح ناعمة عبر بيانات الخطأ المتفرقة هذه، مستخدمة وزنًا محليًا بحيث تؤثر العينات القريبة على التنبؤ أكثر من البعيدة. يُستخدم نفس شكل الدالة المُركبة لجميع الاتجاهات الثلاثة للموقع ولكل الاتجاهات الثلاثة للتوجيه، مما يبسط الحساب داخل نظام التحكم الرقمي للروبوت.
تصحيحات في الزمن الحقيقي داخل وحدة التحكم
أثناء التشغيل، يقوم نظام التحكم باستيفاء مسار الأداة المطلوب في خطوات زمنية صغيرة. قبل دورين من الاستيفاء، يستعلم النظام أسطح الخطأ المركبة للتنبؤ بالخطأ الثابت عند وضعية قادمة ويجمع ذلك مع أحدث تقدير ديناميكي مبني على قراءات المشفرات عند الوضعية الحالية. تُطبَّق التصحيحات الناتجة على الوضعية المطلوبة قبل حسابات الحركيات العكسية وتشغيل محركات المستوى المفصلي. بهذه الطريقة، يُعاد تشكيل مسار الأداة بهدوء في فضاء كارتيسي بينما تستمر وحدات التحكم المفصلية الأسرع بدون تغيير، محافظًة على استقرار النظام.
مدى فاعلية الطريقة
يُثبت الباحثون منهجهم من خلال تجارب مفصلة. أولاً، يأخذون عينات من 96 نقطة عبر الحيز الأسطواني، ويقيسون وضعية الأداة بواسطة كل من المتتبع الليزري وسلسلة المشفرات. يجدون أن منهج المشفرات وحده أقل دقة من الليزر، أساسًا لأن المشفرات تقيس حركة المفصل بدلًا من وضعية الأداة مباشرة. بعد ذلك، يختبرون كيف يغيّر تغيير الحمل عند رأس الأداة التمركز. عندما يُخفض الحمل، يكشف الليزر تحوّلات صغيرة لكنها مهمة لا يمكن للتعويض غير المتصل القياسي تصحيحها. من خلال دمج بيانات الليزر غير المتصلة مع قراءات المشفرات أثناء التشغيل باستخدام الصيغة المقترحة وتركيب المربعات الصغرى المتحركة، تلتقط الطريقة نحو 61 بالمئة من هذه الأخطاء الديناميكية وتبقي الفرق بين الأخطاء المتنبأ بها والفعلية ضمن نحو 5 بالمئة تحت حمل ثابت.
ماذا يعني هذا لروبوتات المستقبل
بالنسبة للقارئ العام، الخلاصة هي أن المؤلفين وجدوا وسيلة عملية للحفاظ على نزاهة ذراع روبوت مرن أثناء العمل. من خلال تعليم الروبوت عن عيوبه الثابتة باستخدام أداة دقيقة لكنها بطيئة، ثم السماح لمشفرات غير مكلفة بتتبع كيفية تغير تلك العيوب تحت قوى فعلية، يمكنهم توجيه الأداة أقرب إلى المكان الذي ينبغي أن تكون فيه في الزمن الحقيقي. يمكن تكييف هذه الاستراتيجية مع روبوتات وأدوات آلية أخرى، موفرة مسارًا نحو تصنيع آلي أكثر دقة دون الحاجة إلى بناء آلات صلبة تمامًا.
الاستشهاد: Guo, H., Li, G. & Liu, S. Pose error real-time prediction and compensation of a 5-DOF hybrid robot based on laser tracker and externally mounted encoders. Sci Rep 16, 15365 (2026). https://doi.org/10.1038/s41598-026-42162-2
الكلمات المفتاحية: دقة الروبوت, تعويض الأخطاء, متتبع ليزري, مشفرات خارجية, روبوت تشغيلي هجين