Clear Sky Science · he
ניבוי והתאמת שגיאת תנוחה בזמן אמת של רובוט היברידי בעל 5 דרגות חופש בהתבסס על מד מד לייזר ומקודדים מותקנים חיצונית
מדוע דיוק הרובוט חשוב
מעתה נדרשים רובוטים תעשייתיים לקדוח, לחרוץ ולהרכיב בדיוק התואם לכלי מכונה ברמת פרימיום. עם זאת, זרועותיהם מתעקלות, מפרקיהם מטים וחום משתנה — וכל אלה משנים בעדינות את מיקום הכלי מהמסלול האידיאלי. המאמר מציג כיצד לשמור על רובוט היברידי מורכב בעל חמש צירים במטרתו בזמן אמת על ידי שילוב שתי מערכות מדידה שונות ושיטת התאמה מתמטית חכמה.
שתי דרכים לצפות ברובוט
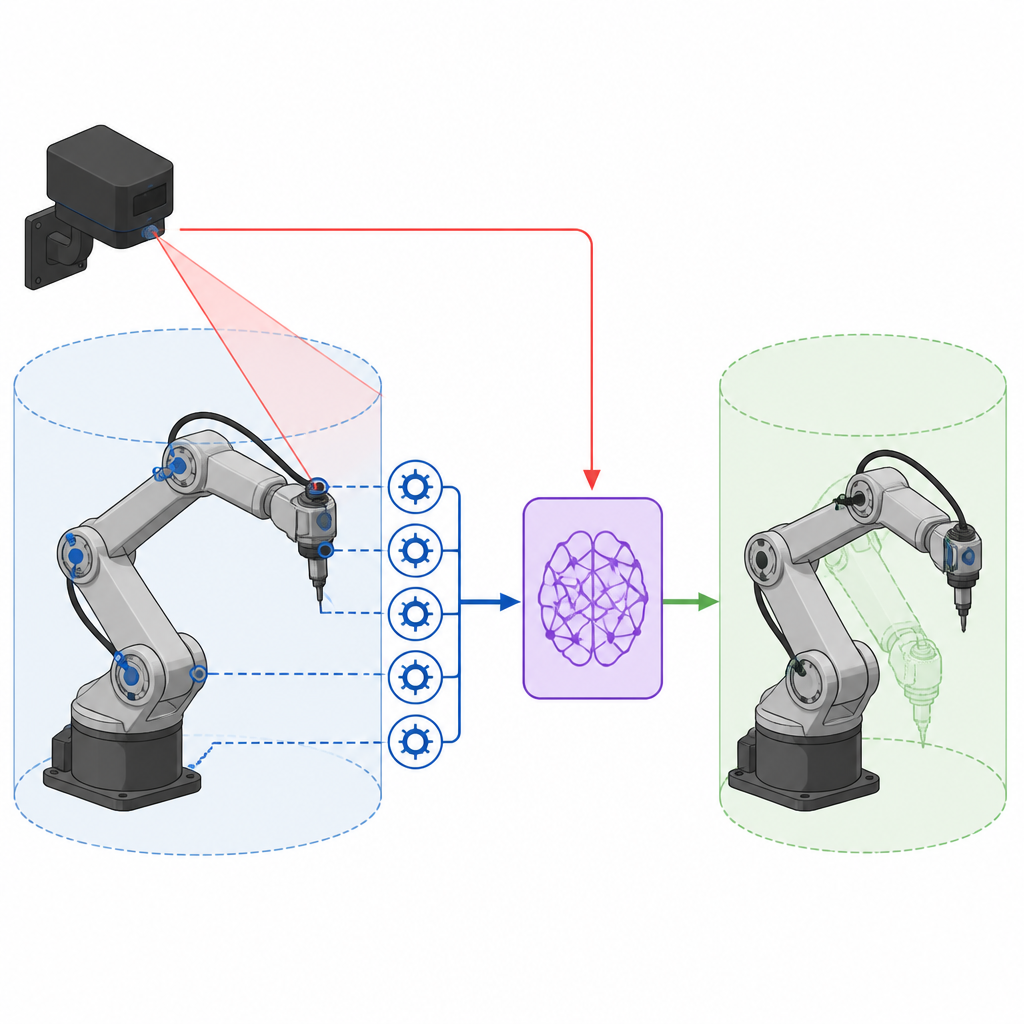
המחברים בוחנים רובוט עיבוד מיוחד בעל חמש דרגות חופש בשם TriMule, שמערב מפרקים מקבילים וסדרתיים כדי להזיז כלי חיתוך בתוך מרחב עבודה צילינדרי גבוה. הם משווים שתי שיטות למעקב אחרי מיקומו האמיתי של הכלי. האחת היא מד לייזר חיצוני שמאתר מטרות רפלקטיביות בדיוק מאוד גבוה, אך באיטיות ותנאים מבוקרים. השנייה היא שרשרת של מקודדים קומפקטיים המותקנים ישירות על המפרקים, שקוראים זוויות ותזוזות בזמן אמת במהלך עיבוד אמיתי, אך מסיקים את מיקום הכלי באופן עקיף דרך גיאומטריית הרובוט ולכן נושאים גם שגיאות התקנה ומבנה משלהם.
מיזוג תצפיות לא מקוונות ומקוונות
בבידוד, כל גישת מדידה אינה מספיקה. מד הלייזר רואה את הכלי בדיוק רב, אך רק במספר מוגבל של תנוחות וברוב המקרים ללא כוחות חיתוך או שינויים בעומס. שרשרת המקודדים עוקבת אחרי הרובוט באופן רציף, אך אינה משווה לדיוק המוחלט של הלייזר ונפגעת מאופן התקנת החיישנים. הרעיון המרכזי בעבודה זו הוא להתייחס לשגיאת התנוחה האמיתית כסכום של חלק סטטי, שנתפס על ידי הלייזר במהלך קמפיין דגימה לא מקוון, וחלק דינמי המשתנה עם העומס וההפרעות. בהשוואת מה שהמקודדים מדווחים במהלך הדגימה ומה שהם מדווחים בעבודה האמיתית, השיטה יכולה להעריך עד כמה שגיאה נוספת הופיעה ולתקנה.
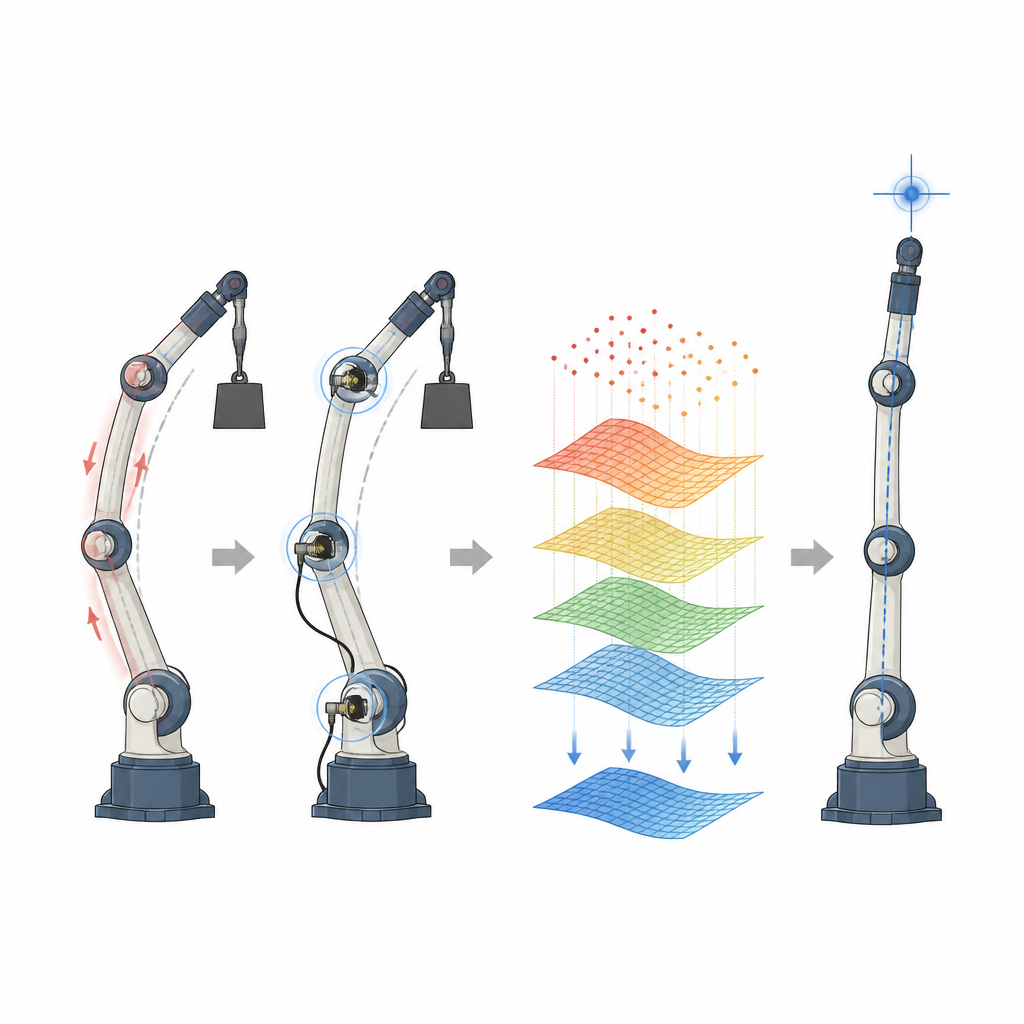
שימוש במשטחים חלקים לחיזוי שגיאות
כדי להפוך את המיזוג למעשיי לכל מרחב העבודה, הצוות משתמש בטכניקה הנקראת ממוצעים מוטים נעים (moving least squares). במקום לבנות מודל פיזי מפורט של שגיאת כל מפרק וקשר, הם מתייחסים לתנוחות הרובוט בנקודות המדגם כאל נקודות במרחב עם שגיאות ידועות. ממוצעים מוטים נעים מתאים אז משטחים חלקים דרך נתוני השגיאה המפוזרים, תוך שימוש במשקל מקומי כך שנקודות מדגם קרובות משפיעות על החיזוי יותר מנקודות מרוחקות. אותה צורת פונקציה מותאמת משמשת לכל שלוש כיווני המיקום ולכל שלוש כיווני הראייה, מה שמפשט את החישוב בתוך מערכת בקרה נומרית של הרובוט.
תיקונים בזמן אמת בתוך הבקר
במהלך העיבוד, מערכת הבקרה מאנטרת את מסלול הכלי המתוכנן באינטרפולציות בזמנים קצרים. בשני מחזורי אינטרפולציה קדימה היא שואלת את משטחי השגיאה המותאמים כדי לחזות את השגיאה הסטטית בתנוחה עתידית ומשלבת זאת עם ההערכה הדינמית העדכנית המבוססת על מקודדים בתנוחה הנוכחית. התיקון המתקבל מוחל על התנוחה המתוכננת לפני חישוב קינמטיקה הפוכה ושליטת סרוו ברמת המפרק. כך, מסלול הכלי מעוצב בחשאי במרחב קרטזי בעוד שבקרי המפרק המהירים ממשיכים לפעול כרגיל, ובכך נשמרת יציבות המערכת.
כמה טובה השיטה
החוקרים מאמתים את הגישה באמצעות ניסויים מפורטים. ראשית, הם מדגמים 96 נקודות ברחבי מרחב העבודה הצילינדרי וממדדים את תנוחת הכלי הן במד הלייזר והן בשרשרת המקודדים. הם מגלים שהשיטה המבוססת על מקודדים בלבד פחות מדויקת מהלייזר, בעיקר כי המקודדים מודדים תנועה של מפרקים ולא תנוחת כלי ישירה. לאחר מכן הם בודקים כיצד שינוי העומס בקצה הכלי משנה את המיקום. כאשר העומס מוקטן, הלייזר חושף סטיות קטנות אך משמעותיות כי כיול לא מקוון רגיל אינו יכול לתקנן. על ידי שילוב נתוני לייזר לא מקוונים עם קריאות מקודדים מקוונות דרך הנוסחה המוצעת והתאמת ממוצעים מוטים נעים, השיטה לוכדת כ־61 אחוז מהשגיאות הדינמיות ושומרת על הפער בין השגיאות החזויות והאמיתיות בתוך כ־5 אחוז תחת עומס קבוע.
מה משמעות הדבר לרובוטים של העתיד
לקורא כללי, המסקנה היא שהמחברים מצאו דרך מעשית לשמור על אמינות זרוע רובוט גמישה במהלך העבודה. על ידי לימוד הרובוט על ליקוייו הסטטיים בעזרת מכשיר מדויק אך איטי, ואז מתן אפשרות למקודדים זולים לעקוב כיצד ליקויים אלה משתנים תחת כוחות ממשיים, הם יכולים לכוון את הכלי קרוב יותר למקום שבו הוא צריך להיות בזמן אמת. אסטרטגיה זו ניתנת להתאמה לרובוטים וכלי מכונה אחרים, ומציעה נתיב לשיפור הדיוק בייצור הממוכן מבלי לבנות מכונות נוקשות לחלוטין.
ציטוט: Guo, H., Li, G. & Liu, S. Pose error real-time prediction and compensation of a 5-DOF hybrid robot based on laser tracker and externally mounted encoders. Sci Rep 16, 15365 (2026). https://doi.org/10.1038/s41598-026-42162-2
מילות מפתח: דיוק רובוט, פיצוי שגיאות, מד לייזר, מקודדים חיצוניים, רובוט חיתוך היברידי