Clear Sky Science · de
Echtzeitvorhersage und Kompensation von Lagefehlern eines 5-DOF-Hybridroboters basierend auf Lasertracker und extern montierten Encodern
Warum Roboterpräzision wichtig ist
Industrieroboter sollen heute bohren, fräsen und montieren mit derselben Genauigkeit wie hochwertige Werkzeugmaschinen. Dennoch biegen sich ihre Arme, Gelenke geben nach und Temperaturen verändern sich – all das verschiebt das Werkzeug von seinem idealen Pfad. Diese Arbeit zeigt, wie sich ein komplexer fünfachsiger Hybridroboter in Echtzeit auf Kurs halten lässt, indem zwei verschiedene Messsysteme mit einer intelligenten mathematischen Anpassungsmethode kombiniert werden.
Zwei Wege, einen Roboter zu beobachten
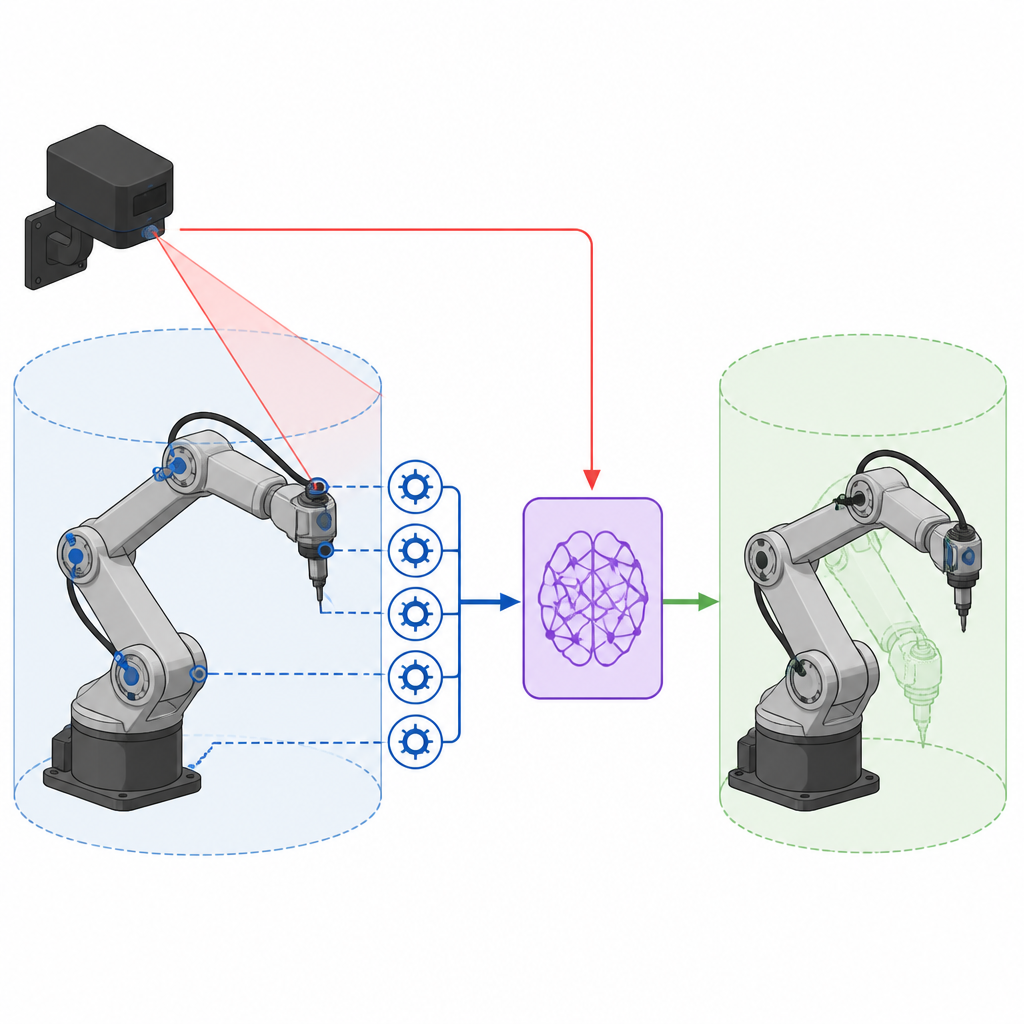
Die Autoren untersuchen einen speziellen fünf Freiheitsgrade besitzenden Bearbeitungsroboter namens TriMule, der parallele und serielle Gelenke mischt, um ein Werkzeug durch einen hohen zylindrischen Arbeitsraum zu bewegen. Sie vergleichen zwei Möglichkeiten, die tatsächliche Werkzeuglage zu verfolgen. Die eine ist ein außerhalb des Roboters platzierter Lasertracker, der Reflexionsziele mit extrem hoher Genauigkeit orten kann, jedoch nur langsam und unter kontrollierten Bedingungen. Die andere ist eine Kette kompakter Encoder, die direkt an den Gelenken befestigt sind und Winkel und Gleitbewegungen in Echtzeit während der tatsächlichen Bearbeitung messen, aber die Werkzeugposition indirekt über die Robotergeometrie erschließen und dadurch eigene Montage- und Strukturfehler aufweisen.
Offline- und Online-Sichten verschmelzen
Allein betrachtet ist jede Messmethode unvollständig. Der Lasertracker sieht das Werkzeug präzise, jedoch nur in einer begrenzten Anzahl von Posen und typischerweise ohne Schnittkräfte oder wechselnde Belastungen. Die Encoder-Kette überwacht den Roboter kontinuierlich, kann aber nicht die absolute Genauigkeit des Lasers erreichen und ist von der Montage der Sensoren beeinflusst. Die Schlüsselidee dieser Arbeit ist, den wahren Lagefehler als Summe aus einem statischen Anteil, der durch den Laser während einer Offline-Abtastkampagne erfasst wird, und einem dynamischen Anteil zu betrachten, der sich mit Last und Störungen ändert. Durch den Vergleich dessen, was die Encoder während der Abtastung sagten, mit dem, was sie während des realen Betriebs melden, lässt sich abschätzen, wie viel zusätzlicher Fehler aufgetreten ist, und dieser kann korrigiert werden.
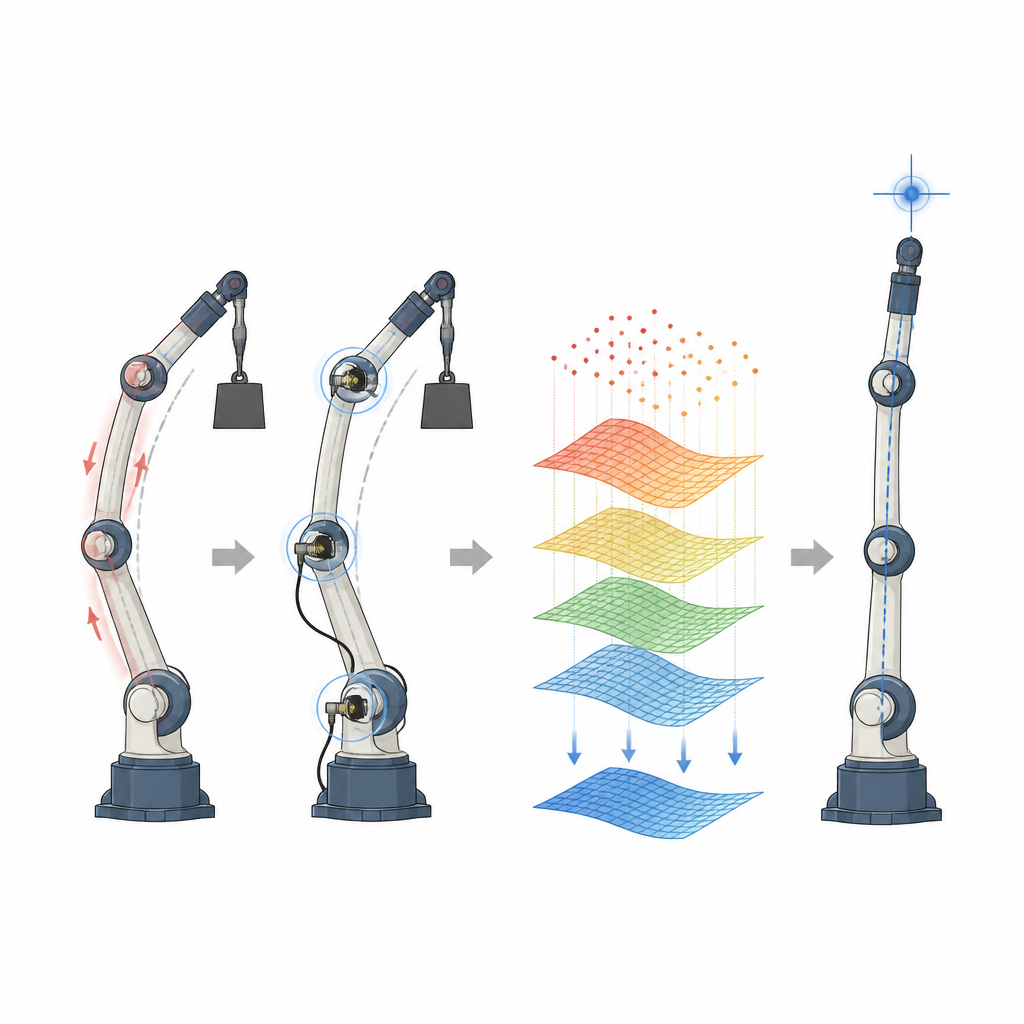
Glatte Flächen zur Vorhersage von Fehlern
Um diese Fusion über den gesamten Arbeitsraum praktikabel zu machen, verwendet das Team eine Technik namens Moving Least Squares. Anstatt ein detailliertes physikalisches Fehlermodell jedes Gelenks und jeder Verbindung zu erstellen, behandeln sie die Roboterposen an den abgetasteten Stellen als Punkte im Raum mit bekannten Fehlern. Moving Least Squares passt dann glatte Flächen durch diese verstreuten Fehlerdaten, wobei eine lokale Gewichtung verwendet wird, sodass nahe Proben die Vorhersage stärker beeinflussen als weiter entfernte. Dieselbe Form der angepassten Funktion wird für alle drei Positionsrichtungen und alle drei Orientierungskomponenten verwendet, was die Berechnung im numerischen Steuerungssystem des Roboters vereinfacht.
Echtzeitkorrekturen im Regler
Während der Bearbeitung interpoliert das Steuerungssystem den befohlenen Werkzeugpfad in kurzen Zeitschritten. Zwei Interpolationszyklen voraus fragt es die angepassten Fehlerflächen ab, um den statischen Fehler an einer kommenden Pose vorherzusagen, und kombiniert dies mit der aktuellen encoderbasierten Schätzung des dynamischen Fehlers an der gegenwärtigen Pose. Die resultierende Korrektur wird auf die befohlene Pose angewendet, bevor Inverse Kinematik und Servoregler auf Gelenkebene laufen. Auf diese Weise wird der Werkzeugpfad unauffällig im kartesischen Raum umgeformt, während die schnelleren Gelenkregler unverändert fortfahren und die Systemstabilität erhalten bleibt.
Wie gut die Methode funktioniert
Die Forscher validieren ihren Ansatz durch detaillierte Experimente. Zunächst sampeln sie 96 Punkte im zylindrischen Arbeitsraum und messen die Werkzeuglage sowohl mit dem Lasertracker als auch mit der Encoder-Kette. Sie stellen fest, dass die rein encoderbasierte Methode weniger genau ist als der Laser, hauptsächlich weil Encoder die Gelenkbewegung und nicht die Werkzeuglage direkt messen. Anschließend testen sie, wie sich eine Veränderung der Last an der Werkzeugspitze auf die Positionierung auswirkt. Bei verringerter Last zeigt der Laser kleine, aber wichtige Verschiebungen, die eine standardmäßige Offline-Kalibrierung nicht korrigieren kann. Durch die Kombination von Offline-Laserdaten mit Online-Encoder-Lesungen mittels der vorgeschlagenen Formel und der Moving-Least-Squares-Anpassung erfasst die Methode etwa 61 Prozent dieser dynamischen Fehler und hält die Differenz zwischen vorhergesagten und tatsächlichen Fehlern unter konstanter Last auf etwa 5 Prozent.
Was das für zukünftige Roboter bedeutet
Für den allgemein Interessierten lässt sich zusammenfassen: Die Autoren haben einen praktischen Weg gefunden, einen flexiblen Roboterarm während des Betriebs präziser zu halten. Indem sie den Roboter seine statischen Unvollkommenheiten mit einem präzisen, aber langsamen Instrument lehren und anschließend kostengünstige Encoder verfolgen lassen, wie sich diese Unvollkommenheiten unter realen Kräften ändern, können sie das Werkzeug in Echtzeit näher an den Sollpunkt steuern. Diese Strategie könnte auf andere Roboter und Werkzeugmaschinen übertragen werden und bietet einen Weg zu genauerer automatisierter Fertigung, ohne perfekt steife Maschinen bauen zu müssen.
Zitation: Guo, H., Li, G. & Liu, S. Pose error real-time prediction and compensation of a 5-DOF hybrid robot based on laser tracker and externally mounted encoders. Sci Rep 16, 15365 (2026). https://doi.org/10.1038/s41598-026-42162-2
Schlüsselwörter: Roboterpräzision, Fehlerkompensation, Lasertracker, externe Encoder, Hybridbearbeitungsroboter