Clear Sky Science · nl
Realtime voorspelling en compensatie van posefouten van een 5-DOF hybride robot op basis van lasertracker en extern gemonteerde encoders
Waarom robotnauwkeurigheid telt
Industriële robots worden tegenwoordig gevraagd te boren, frezen en assembleren met dezelfde precisie als hoogwaardige werktuigmachines. Toch buigen hun armen, geven gewrichten mee en schuiven temperaturen, wat het gereedschap van het ideale pad afdrukt. Dit artikel laat zien hoe een complexe vijfassige hybride robot in realtime op doel gehouden kan worden door twee verschillende meetsystemen te combineren met een slimme wiskundige fittingmethode.
Twee manieren om een robot te volgen
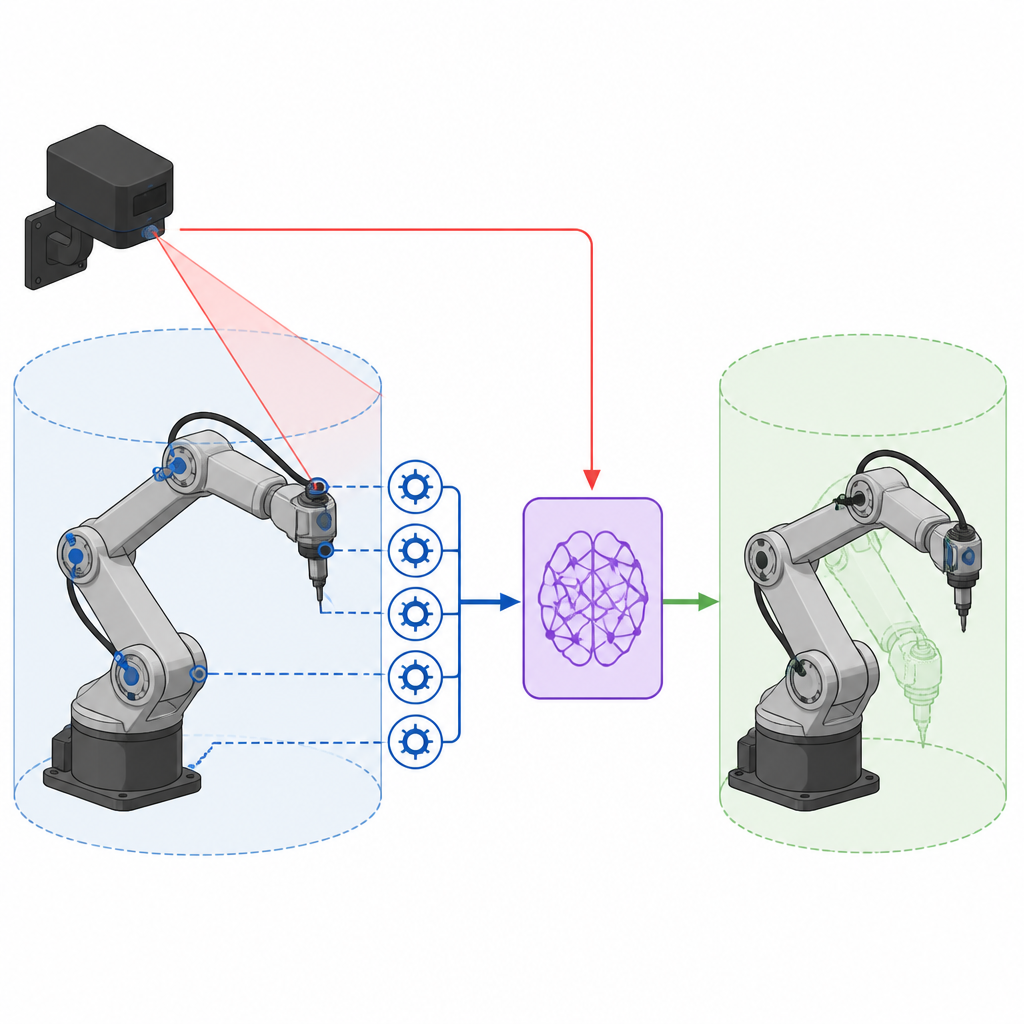
De auteurs bestuderen een bijzondere vijfvrijheidsgraden bewerkingsrobot genaamd TriMule, die parallelle en seriële gewrichten mengt om een snijgereedschap door een hoge cilindrische werkruimte te bewegen. Ze vergelijken twee manieren om te volgen waar het gereedschap daadwerkelijk is. De ene is een buiten de robot geplaatste lasertracker die reflecterende targets zeer nauwkeurig kan lokaliseren, maar alleen langzaam en onder gecontroleerde omstandigheden. De andere is een keten van compacte encoders die direct aan de gewrichten zijn vastgeschroefd en hoeken en translaties in realtime tijdens echt bewerken uitlezen, maar de gereedschappositie indirect afleiden via de robotgeometrie en daardoor eigen montage- en structurele fouten meedragen.
Offline en online gezichtspunten mengen
Op zichzelf schiet elk meetprincipe tekort. De lasertracker ziet het gereedschap precies, maar slechts op een beperkt aantal poses en doorgaans zonder snijkrachten of wisselende belastingen. De encoderketen bewaakt de robot continu, maar kan de absolute nauwkeurigheid van de laser niet evenaren en wordt beïnvloed door hoe de sensoren gemonteerd zijn. Het kernidee van dit werk is de echte posefout te beschouwen als de som van een statisch deel, vastgelegd door de laser tijdens een offline bemonsteringscampagne, en een dynamisch deel dat verandert met belasting en verstoringen. Door te vergelijken wat de encoders tijdens de bemonstering aangeven en wat ze tijdens het echte werk aangeven, kan de methode inschatten hoeveel extra fout is opgetreden en die compenseren.
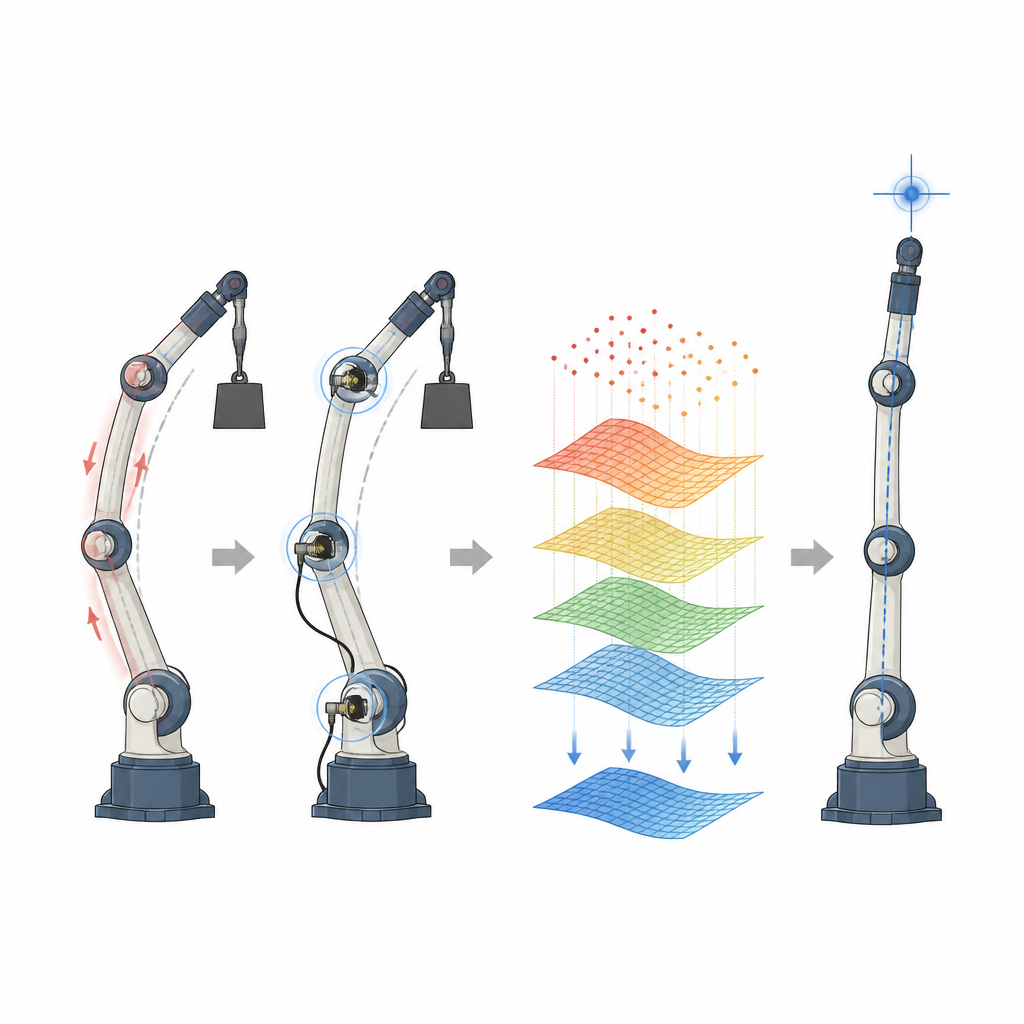
Fouten voorspellen met gladde oppervlakken
Om deze fusie praktisch over de hele werkruimte te maken, gebruikt het team een techniek genaamd moving least squares. In plaats van een gedetailleerd fysisch foutmodel van ieder gewricht en iedere schakel op te bouwen, behandelen ze de robotposes op bemonsterde locaties als punten in de ruimte met bekende fouten. Moving least squares past dan gladde oppervlakken aan door deze verspreide foutgegevens, met lokale wegingsfactoren zodat nabijgelegen monsters de voorspelling meer beïnvloeden dan verre. Dezelfde vorm van de gefitte functie wordt gebruikt voor alle drie de positierichtingen en alle drie de orientatierichtingen, wat de berekening in het numerieke besturingssysteem van de robot vereenvoudigt.
Realtime correcties binnen de controller
Tijdens het bewerken interpoleert het besturingssysteem het gecommandeerde gereedschapspad in kleine tijdstappen. Twee interpolatiecycli vooruit vraagt het de gefitte foutoppervlakken op om de statische fout bij een aanstaande pose te voorspellen en combineert dit met de laatste encoder-gebaseerde schatting van dynamische fout bij de huidige pose. De resulterende correctie wordt toegepast op de gecommandeerde pose voordat inverse kinematica en servo-besturing op gewrichtsniveau worden uitgevoerd. Op deze manier wordt het gereedschapspad in cartesische ruimte stilletjes hervormd terwijl de snellere gewrichtscontrollers ongewijzigd doorgaan, wat de systeemstabiliteit behoudt.
Hoe goed de methode werkt
De onderzoekers valideren hun benadering met gedetailleerde experimenten. Eerst bemonsteren ze 96 punten door de cilindrische werkruimte en meten de gereedschappose zowel met de lasertracker als met de encoderketen. Ze vinden dat de encoder-gebaseerde methode op zichzelf minder nauwkeurig is dan de laser, hoofdzakelijk omdat encoders gewrichtsbeweging meten in plaats van gereedschappose direct. Vervolgens testen ze hoe het veranderen van de belasting op de gereedschapstip de positionering beïnvloedt. Wanneer de belasting wordt verminderd, onthult de laser kleine maar belangrijke verschuivingen die standaard offline kalibratie niet kan corrigeren. Door offline lasergegevens te combineren met online encoderlezingen via de voorgestelde formule en moving least squares-fitting, legt de methode ongeveer 61 procent van deze dynamische fouten vast en houdt het verschil tussen voorspelde en werkelijke fouten binnen ongeveer 5 procent onder constante belasting.
Wat dit betekent voor toekomstige robots
Voor de geïnteresseerde lezer is de conclusie dat de auteurs een praktische manier hebben gevonden om een flexibele robotarm betrouwbaar te houden tijdens werk. Door de robot zijn statische imperfecties te leren met een precies maar traag instrument, en vervolgens goedkope encoders te gebruiken om te volgen hoe die imperfecties veranderen onder echte krachten, kunnen ze het gereedschap dichter bij de bedoelde plek sturen in realtime. Deze strategie kan worden aangepast aan andere robots en werktuigmachines en biedt een route naar nauwkeuriger geautomatiseerde productie zonder dat men perfect stijve machines hoeft te bouwen.
Bronvermelding: Guo, H., Li, G. & Liu, S. Pose error real-time prediction and compensation of a 5-DOF hybrid robot based on laser tracker and externally mounted encoders. Sci Rep 16, 15365 (2026). https://doi.org/10.1038/s41598-026-42162-2
Trefwoorden: robotnauwkeurigheid, foutcompensatie, lasertracker, externe encoders, hybride bewerkingsrobot