Clear Sky Science · ru
Реальное предсказание и компенсация погрешности положения 5-ступенчатого гибридного робота на основе лазерного трекера и внешних энкодеров
Почему важна точность робота
От промышленных роботов теперь требуют сверления, фрезерования и сборки с той же точностью, что и у высококлассных станков. Однако их руки изгибаются, шарниры пружинят и меняется температура — все это смещает инструмент от идеальной траектории. В этой работе показано, как удерживать сложный пятиосевой гибридный робот в цели в реальном времени, сочетая две разные измерительные системы и продуманный математический метод аппроксимации.
Два способа наблюдать за роботом
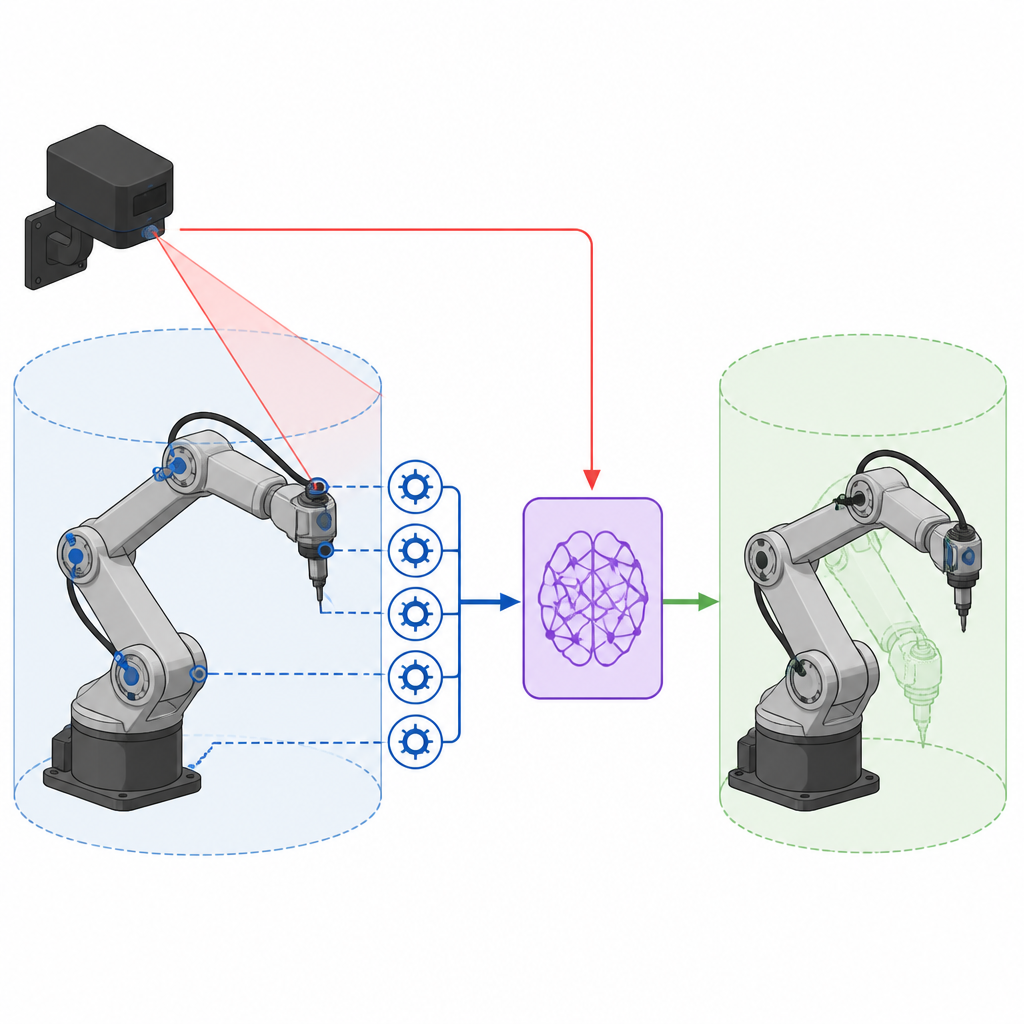
Авторы изучают специальный пятиступенчатый обрабатывающий робот под названием TriMule, который совмещает параллельные и последовательные сочленения, чтобы перемещать режущий инструмент по высокому цилиндрическому рабочему объему. Они сравнивают два подхода к отслеживанию фактического положения инструмента. Первый — лазерный трекер, установленный снаружи робота, который может с очень высокой точностью определять положение отражательных мишеней, но делает это медленно и в контролируемых условиях. Второй — цепочка компактных энкодеров, прикрученных непосредственно к суставам, которые в реальном времени во время обработки измеряют углы и перемещения, но косвенно выводят положение инструмента через геометрию робота и потому сами вносят погрешности монтажа и конструкции.
Смешение офлайн- и онлайн-данных
Каждый из подходов по отдельности не идеален. Лазерный трекер точно видит инструмент, но только в ограниченном числе поз и обычно без учёта сил резания или изменяющихся нагрузок. Цепочка энкодеров следит за роботом непрерывно, но не достигает абсолютной точности лазера и зависит от того, как установлены датчики. Ключевая идея работы — рассматривать истинную погрешность положения как сумму статической части, зафиксированной лазером в ходе офлайн-сканирования, и динамической части, которая меняется с нагрузкой и возмущениями. Сравнивая показания энкодеров во время выборки и во время реальной работы, метод оценивает, сколько дополнительной ошибки появилось, и компенсирует её.
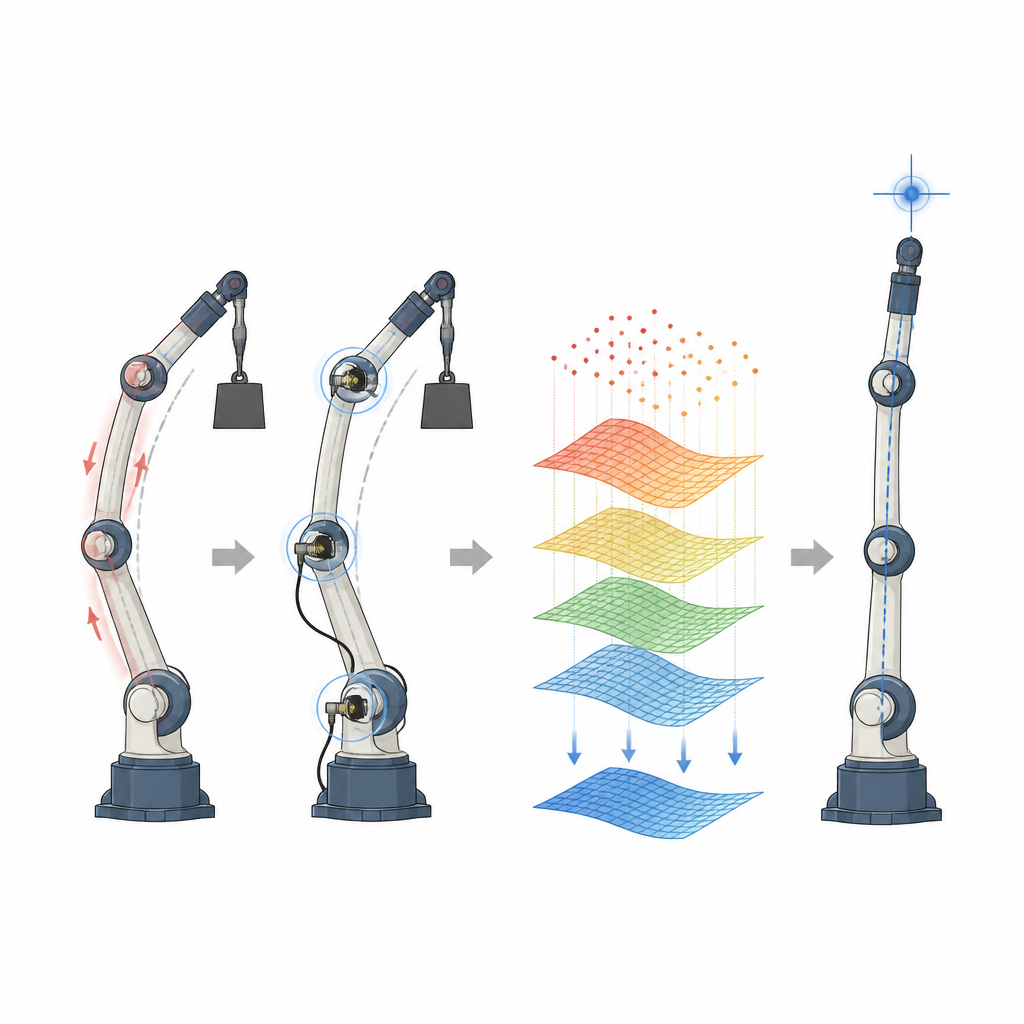
Использование плавных поверхностей для предсказания ошибок
Чтобы объединение работало по всему рабочему объёму, команда применяет метод, называемый движущимися наименьшими квадратами. Вместо того чтобы строить детальную физическую модель ошибок каждого звена и сочленения, они рассматривают позы робота в точках выборки как точки в пространстве с известными ошибками. Метод движущихся наименьших квадратов аппроксимирует через разбросанные данные гладкие поверхности, используя локальную взвешенность: соседние образцы влияют на предсказание сильнее, чем удалённые. Одинаковая форма аппроксимирующей функции используется для всех трёх компонент положения и всех трёх компонент ориентации, что упрощает вычисления внутри числовой системы управления роботом.
Коррекции в реальном времени внутри контроллера
Во время обработки система управления интерполирует командную траекторию инструмента малыми шагами по времени. За два цикла интерполяции вперёд она опрашивает аппроксимированные поверхности ошибок, чтобы предсказать статическую ошибку для предстоящей позы, и комбинирует это с последней оценкой динамической ошибки, полученной по энкодерам для текущей позы. Полученная коррекция применяется к командной позе перед выполнением обратной кинематики и сервоуправления на уровне суставов. Таким образом траектория инструмента тихо корректируется в декартовой системе, в то время как более быстрые контроллеры по звеньям продолжают работать без изменений, сохраняя стабильность системы.
Насколько хорошо работает метод
Исследователи проверили подход в детальных экспериментах. Сначала они отобрали 96 точек по всему цилиндрическому рабочему объёму, измеряя позу инструмента и лазером, и цепочкой энкодеров. Они обнаружили, что метод на основе энкодеров сам по себе менее точен по сравнению с лазером, главным образом потому, что энкодеры измеряют движение суставов, а не положение инструмента напрямую. Затем они проверили, как изменение нагрузки на торце инструмента влияет на позиционирование. При уменьшении нагрузки лазер показывает небольшие, но важные сдвиги, которые стандартная офлайн-калибровка не исправляет. Объединив офлайн-данные лазера с онлайн-показаниями энкодеров через предложенную формулу и аппроксимацию движущимися наименьшими квадратами, метод захватывает около 61 процента этих динамических ошибок и удерживает разницу между предсказанными и фактическими ошибками примерно в пределах 5 процентов при постоянной нагрузке.
Что это значит для будущих роботов
Для непрофессионального читателя суть в том, что авторы нашли практический способ удерживать гибкую руку робота честной во время работы. Обучив робота его статическим несовершенствам с помощью точного, но медленного инструмента, а затем позволив недорогим энкодерам отслеживать, как эти несовершенства меняются под реальными силами, можно в реальном времени направлять инструмент ближе к требуемой точке. Эта стратегия может быть адаптирована для других роботов и станков, открывая путь к более точному автоматизированному производству без необходимости строить идеально жёсткие машины.
Цитирование: Guo, H., Li, G. & Liu, S. Pose error real-time prediction and compensation of a 5-DOF hybrid robot based on laser tracker and externally mounted encoders. Sci Rep 16, 15365 (2026). https://doi.org/10.1038/s41598-026-42162-2
Ключевые слова: точность робота, компенсация ошибок, лазерный трекер, внешние энкодеры, гибридный обрабатывающий робот