Clear Sky Science · tr
Lazer izleme ve harici enkoderlere dayalı 5-DOF hibrit robotun konum hatasının gerçek zamanlı tahmini ve telafisi
Neden robot doğruluğu önemlidir
Endüstriyel robotlardan artık delme, frezeleme ve montaj işlerini yüksek uçta makine takımlarıyla aynı hassasiyetle yapmaları bekleniyor. Oysa kolları bükülür, eklemler esner ve sıcaklıklar kayar; bunların tümü takımın ideal yolundan sapmasına yol açar. Bu makale, iki farklı ölçüm sistemini ve zeki bir matematiksel uydurma yöntemini birleştirerek karmaşık bir beş eksenli hibrit robotu gerçek zamanlı olarak nasıl hedefte tutacağını gösteriyor.
Robotu izlemek için iki yol
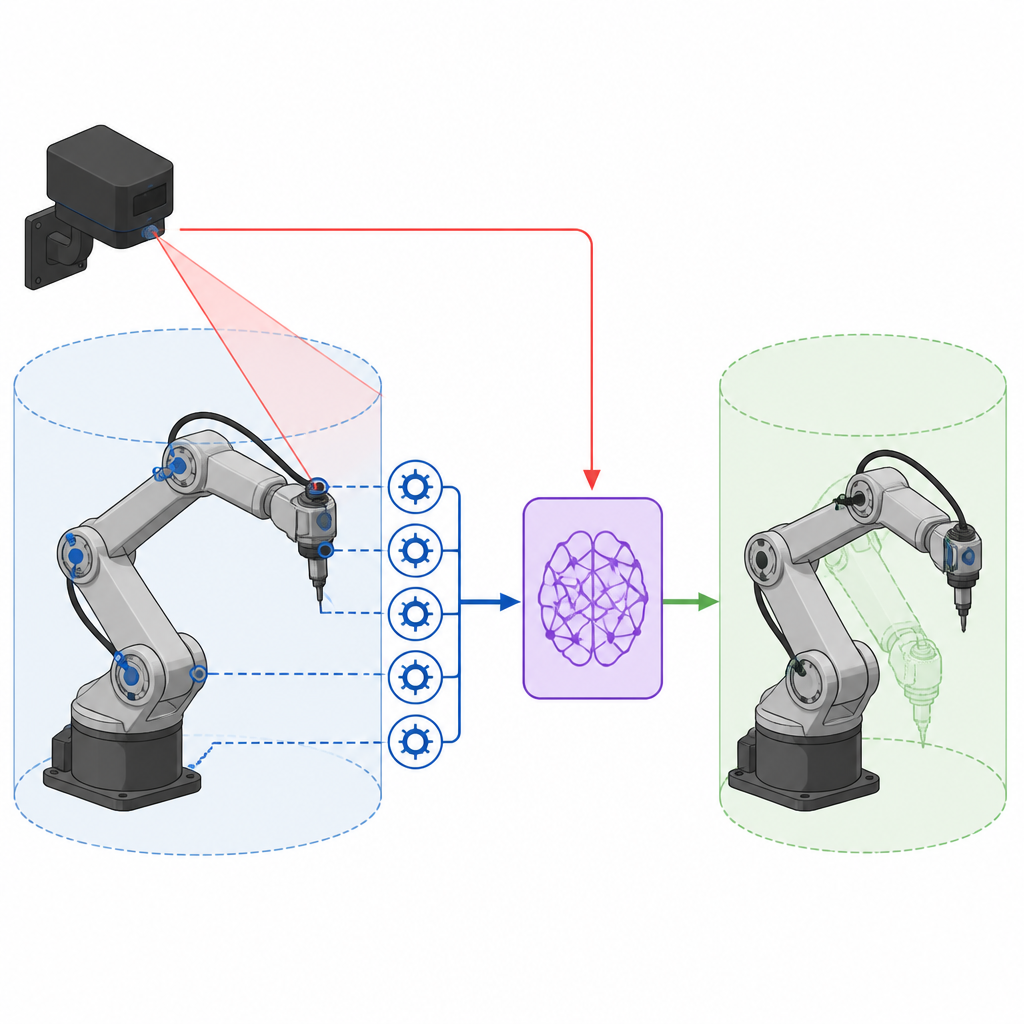
Yazarlar, paralel ve seri eklemleri karıştırarak yüksek silindirik bir çalışma hacminde kesici takımı hareket ettiren TriMule adlı özel bir beş serbestlik dereceli işleme robotunu inceliyor. Takımın gerçekte nerede olduğunu izlemenin iki yolunu karşılaştırıyorlar. Birincisi robotun dışında konumlandırılmış ve yansıtıcı hedefleri son derece yüksek doğrulukla tespit edebilen ancak yalnızca yavaş ve kontrollü koşullarda çalışan bir lazer izleyici. Diğeri ise eklemlere doğrudan cıvatalanmış, gerçek işleme sırasında açıları ve kaymaları gerçek zamanlı okuyan kompakt enkoder zinciri; fakat bu enkoderler robotun geometrisi aracılığıyla takım pozisyonunu dolaylı olarak çıkarır ve dolayısıyla kendi montaj ve yapısal hatalarını taşır.
Çevrimdışı ve çevrimiçi görünümlerin harmanlanması
Tek başına her ölçüm yaklaşımı eksik kalıyor. Lazer izleyici takımı hassas biçimde görür, ancak yalnızca sınırlı sayıda pozda ve genellikle kesme kuvvetleri veya değişen yükler olmadan ölçüm yapar. Enkoder zinciri robotu sürekli izler, ancak lazerin mutlak doğruluğuna erişemez ve sensörlerin nasıl monte edildiğinden etkilenir. Bu çalışmanın kilit fikri, gerçek konum hatasını çevrimdışı örnekleme kampanyası sırasında lazerle yakalanan statik bir kısım ile yük ve dış etkilerle değişen dinamik bir kısmın toplamı olarak ele almak. Örnekleme sırasında enkoderlerin söyledikleriyle gerçek iş sırasında enkoderlerin söylediklerini karşılaştırarak, ne kadar ek hatanın ortaya çıktığını tahmin edip düzeltebiliyorlar.
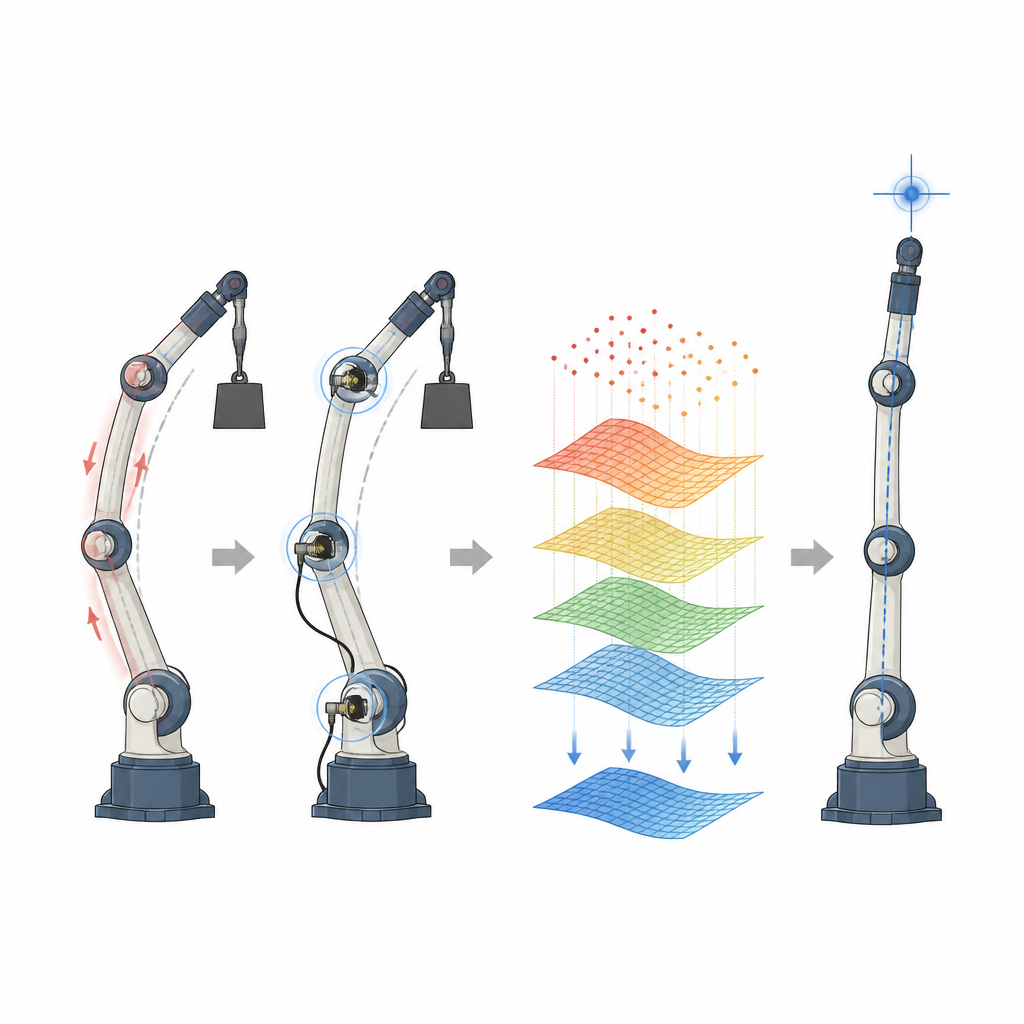
Hataları tahmin etmek için düzgün yüzeylerin kullanılması
Bu füzyonu tüm çalışma hacmine uygulanabilir kılmak için ekip hareketli en küçük kareler (moving least squares) denilen bir teknik kullanıyor. Her eklem ve bağlantının ayrıntılı fiziksel hata modelini oluşturmak yerine, örneklenen konumlardaki robot pozlarını bilinen hataları olan uzaydaki noktalar olarak ele alıyorlar. Hareketli en küçük kareler, uzak örneklerden daha çok yakın örneklerin etkilediği yerel ağırlıklandırma kullanarak bu dağınık hata verileri üzerinden düzgün yüzeyler uyduruyor. Uydurulan fonksiyonun aynı şekli, tüm üç konum yönü ve tüm üç yönelim yönü için ortak olarak kullanılıyor; bu da robotun sayısal kumanda sistemi içindeki hesaplamayı basitleştiriyor.
Kumanda içinde gerçek zamanlı düzeltmeler
İşleme sırasında kontrol sistemi komutlandırılmış takım yolunu küçük zaman adımlarında enterpolasyon yapar. İki enterpolasyon döngüsü ilerde, yaklaşan bir pozdaki statik hatayı tahmin etmek için uyarlanmış hata yüzeylerini sorgular ve bunu mevcut pozdaki enkoder tabanlı en güncel dinamik hata tahminiyle birleştirir. Ortaya çıkan düzeltme, ters kinematik ve eklem düzeyindeki servo kontrol çalışmadan önce komutlandırılmış poza uygulanır. Bu yolla, takım yolu Kartezyen uzayda sessizce yeniden şekillendirilirken daha hızlı eklem kontrolörleri değişmeden ilerler ve sistem kararlılığı korunur.
Yöntemin ne kadar iyi çalıştığı
Araştırmacılar yaklaşımlarını ayrıntılı deneylerle doğruluyor. İlk olarak, silindirik çalışma hacmi boyunca 96 nokta örnekliyor ve takım pozunu hem lazer izleyici hem de enkoder zinciri ile ölçüyorlar. Enkoder tabanlı yöntemin tek başına lazer kadar doğru olmadığını; bunun başlıca nedeni enkoderlerin takım pozisyonunu doğrudan değil, eklem hareketini ölçmesi olduğunu buluyorlar. Ardından takım ucundaki yükün konumlandırmayı nasıl değiştirdiğini test ediyorlar. Yük azaltıldığında lazer, standart çevrimdışı kalibrasyonun düzeltemediği küçük ama önemli kaymaları ortaya koyuyor. Önerilen formül ve hareketli en küçük kareler uydurması aracılığıyla çevrimdışı lazer verilerini çevrimiçi enkoder okumalarıyla birleştirerek yöntem, bu dinamik hataların yaklaşık %61’ini yakalıyor ve sabit yük altında tahmin edilen ile gerçek hatalar arasındaki farkı yaklaşık %5 içinde tutuyor.
Geleceğin robotları için ne anlama geliyor
Bir uzman olmayan okuyucu için sonucu özetleyecek olursak: yazarlar, esnek bir robot kolunu çalışırken doğru tutmanın pratik bir yolunu bulmuşlar. Robotu, hassas ama yavaş bir alet kullanarak statik kusurları hakkında eğitmek ve ardından ucuz enkoderlere bu kusurların gerçek kuvvetler altındaki değişimini izleterek, takımı gerçek zamanlı olarak olması gereken yere daha yakın tutabiliyorlar. Bu strateji diğer robotlara ve makine takımlarına uyarlanabilir; tamamen rijit makineler inşa etmeden daha doğru otomatik imalata doğru bir yol sunar.
Atıf: Guo, H., Li, G. & Liu, S. Pose error real-time prediction and compensation of a 5-DOF hybrid robot based on laser tracker and externally mounted encoders. Sci Rep 16, 15365 (2026). https://doi.org/10.1038/s41598-026-42162-2
Anahtar kelimeler: robot doğruluğu, hata telafisi, lazer izleyici, harici enkoderler, hibrit işleme robotu