Clear Sky Science · pl
Prognozowanie i kompensacja błędu położenia w czasie rzeczywistym 5‑stopniowego robota hybrydowego w oparciu o laserowy tracker i zewnętrznie zamontowane enkodery
Dlaczego dokładność robota ma znaczenie
Współczesne roboty przemysłowe mają wiercić, frezować i montować z precyzją porównywalną do zaawansowanych obrabiarek. Tymczasem ich ramiona się uginają, przeguby pracują z niewielkimi odkształceniami, a temperatury się zmieniają — wszystko to przesuwa narzędzie względem idealnej trajektorii. Artykuł pokazuje, jak utrzymać złożonego pięcioosiowego robota hybrydowego na celu w czasie rzeczywistym, łącząc dwa różne systemy pomiarowe i sprytną metodę matematycznego dopasowania.
Dwa sposoby obserwacji robota
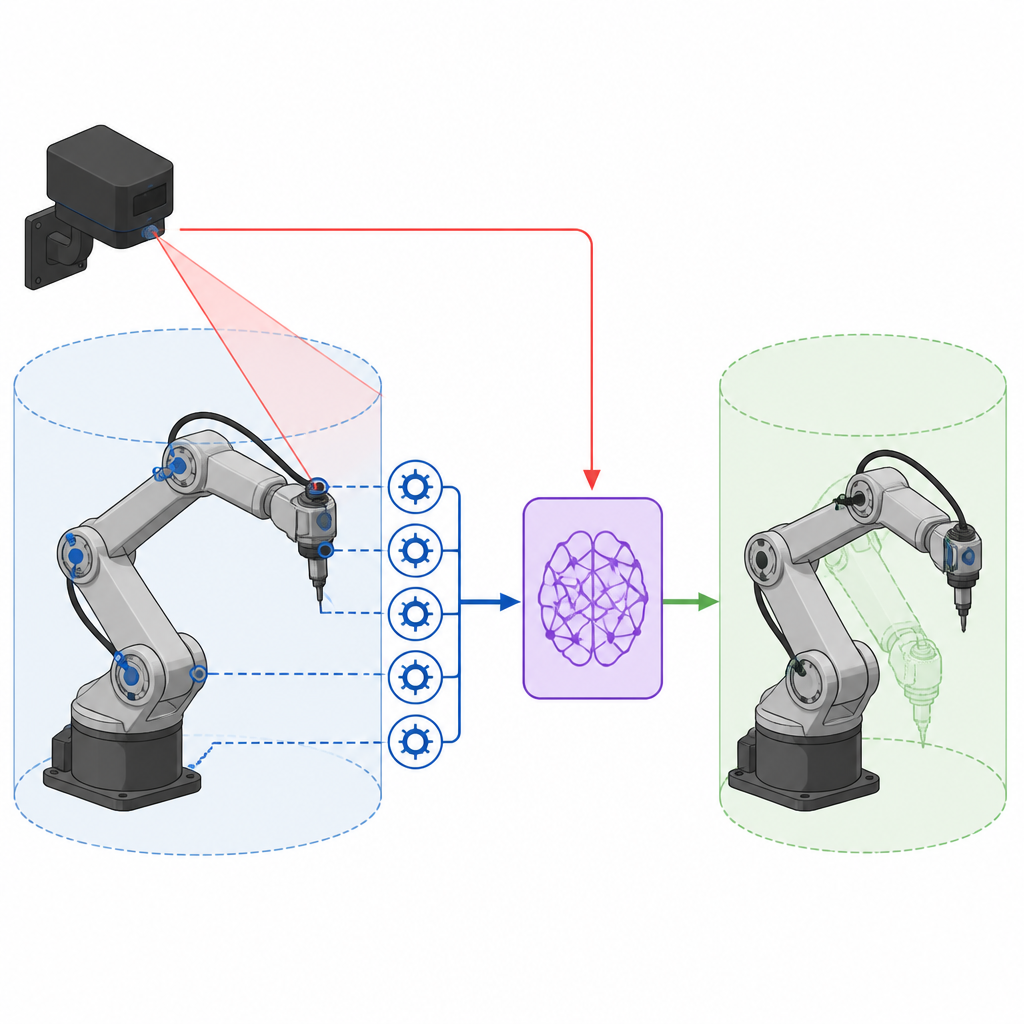
Autorzy badają specjalnego pięciostopniowego robota obróbczego nazwanego TriMule, łączącego przeguby równoległe i szeregowe, by przesuwać narzędzie w wysokiej, cylindrycznej przestrzeni roboczej. Porównują dwa sposoby śledzenia rzeczywistego położenia narzędzia. Pierwszy to zewnętrzny laserowy tracker, który lokalizuje refleksyjne cele z bardzo wysoką dokładnością, ale działa powoli i w kontrolowanych warunkach. Drugi to łańcuch kompaktowych enkoderów przykręconych bezpośrednio do przegubów, które w czasie rzeczywistym odczytują kąty i przesunięcia podczas rzeczywistej obróbki, lecz pozycję narzędzia wyznaczają pośrednio przez geometrię robota i dlatego mają własne błędy montażu i strukturalne.
Łączenie widoku offline i online
Żadne z podejść osobno nie wystarcza. Laserowy tracker precyzyjnie mierzy pozycję narzędzia, ale tylko dla ograniczonej liczby pozycji i zwykle bez sił skrawania czy zmiennych obciążeń. Łańcuch enkoderów monitoruje robota ciągle, lecz nie osiąga absolutnej dokładności lasera i zależy od montażu czujników. Kluczowa idea tej pracy to traktowanie prawdziwego błędu położenia jako sumy części statycznej, uchwyconej przez laser w kampanii pomiarów offline, oraz części dynamicznej zmiennej przy obciążeniach i zaburzeniach. Porównując odczyty enkoderów podczas próbkowania i podczas rzeczywistej pracy, metoda szacuje przyrost błędu dynamicznego i go koryguje.
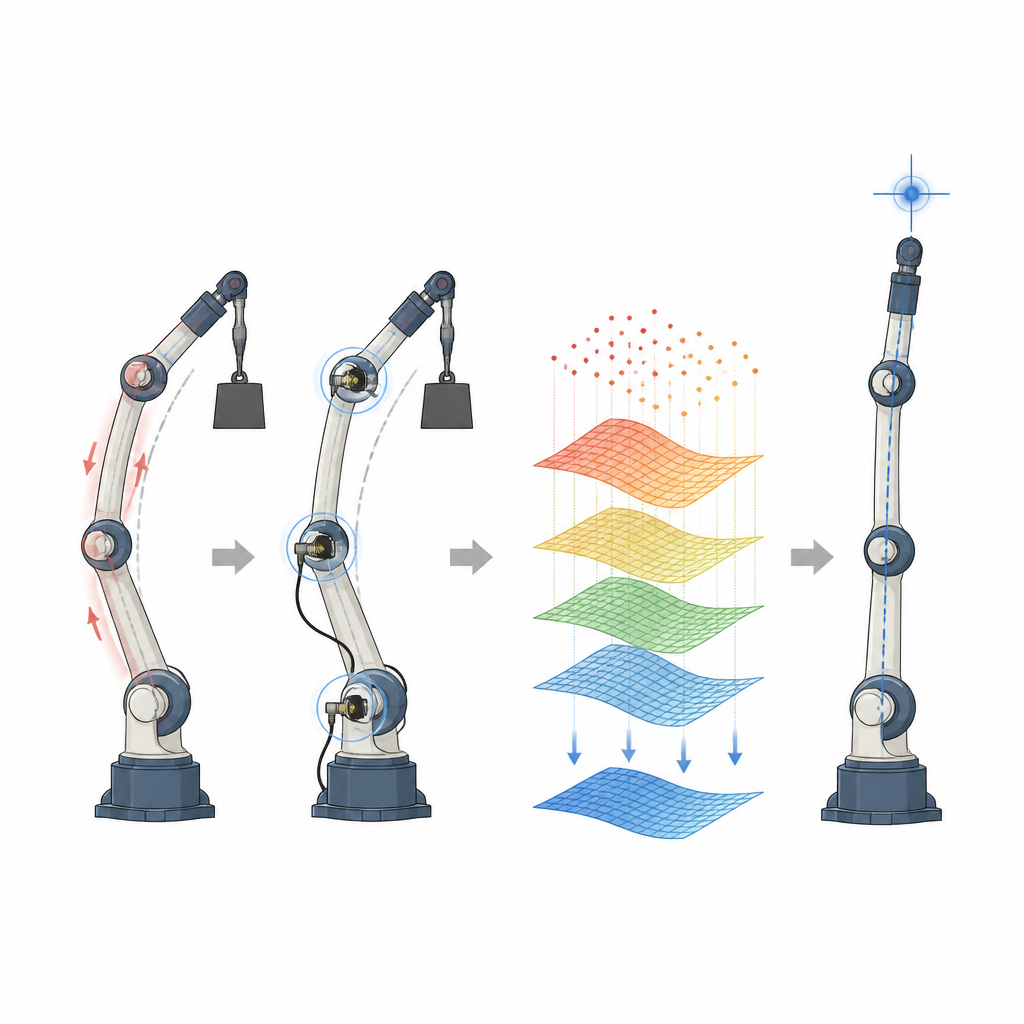
Użycie gładkich powierzchni do prognozowania błędów
Aby zrealizować to połączenie w całej przestrzeni roboczej, zespół stosuje technikę nazwaną ruchomymi najmniejszymi kwadratami. Zamiast budować szczegółowy fizyczny model błędów każdego przegubu i łącznika, traktują pozycje robota w punktach próbkowania jako punkty w przestrzeni z przypisanymi błędami. Ruchome najmniejsze kwadraty dopasowują przez te rozproszone dane gładkie powierzchnie, stosując lokalne ważenie tak, że próbki bliższe mają większy wpływ na prognozę niż odległe. Ten sam kształt funkcji dopasowania używany jest dla wszystkich trzech składowych pozycji i trzech składowych orientacji, co upraszcza obliczenia wewnątrz systemu sterowania numerycznego robota.
Korekty w czasie rzeczywistym wewnątrz sterownika
Podczas obróbki system sterowania interpoluje zadaną ścieżkę narzędzia w krótkich krokach czasowych. Dwa cykle interpolacji do przodu zapytują dopasowane powierzchnie błędu o przewidywany błąd statyczny dla nadchodzącej pozy, a to łączone jest z najnowszą, enkoderową estymacją błędu dynamicznego dla aktualnej pozy. Otrzymana korekta jest nanoszona na zadaną pozycję przed wykonaniem kinematyki odwrotnej i sterowania serwomechanizmami na poziomie przegubów. W ten sposób trajektoria narzędzia jest dyskretnie modyfikowana w przestrzeni kartezjańskiej, podczas gdy szybsze regulatory przegubów działają bez zmian, zachowując stabilność systemu.
Jak dobrze działa metoda
Naukowcy walidują swoje podejście w szczegółowych eksperymentach. Najpierw próbkowali 96 punktów w całej cylindrycznej przestrzeni roboczej, mierząc pozycję narzędzia zarówno laserowym trackerem, jak i łańcuchem enkoderów. Stwierdzili, że sama metoda oparta na enkoderach jest mniej dokładna niż laser, głównie dlatego, że enkodery mierzą ruchy przegubów, a nie bezpośrednio pozycję narzędzia. Następnie badali, jak zmiana obciążenia w punkcie narzędzia wpływa na pozycjonowanie. Po zmniejszeniu obciążenia laser ujawnił małe, lecz istotne przesunięcia, których standardowa kalibracja offline nie potrafi skorygować. Łącząc dane laserowe z pomiarami enkoderów online za pomocą proponowanego wzoru i dopasowania ruchomymi najmniejszymi kwadratami, metoda wychwytuje około 61 procent tych błędów dynamicznych i utrzymuje różnicę między przewidywanymi a rzeczywistymi błędami na poziomie około 5 procent przy stałym obciążeniu.
Co to znaczy dla przyszłych robotów
Dla czytelnika nietechnicznego sedno sprawy jest takie, że autorzy znaleźli praktyczny sposób, by utrzymać elastyczne ramię robota w ryzach podczas pracy. Ucząc robota jego statycznych niedoskonałości za pomocą precyzyjnego, lecz wolnego instrumentu, a następnie pozwalając tanim enkoderom śledzić, jak te niedoskonałości zmieniają się pod rzeczywistymi siłami, można w czasie rzeczywistym przybliżyć narzędzie do właściwej pozycji. Strategia ta może zostać zaadaptowana do innych robotów i obrabiarek, otwierając drogę do dokładniejszej automatyzacji produkcji bez konieczności budowania idealnie sztywnych maszyn.
Cytowanie: Guo, H., Li, G. & Liu, S. Pose error real-time prediction and compensation of a 5-DOF hybrid robot based on laser tracker and externally mounted encoders. Sci Rep 16, 15365 (2026). https://doi.org/10.1038/s41598-026-42162-2
Słowa kluczowe: dokładność robota, kompensacja błędów, laserowy tracker, zewnętrzne enkodery, hybrydowy robot obróbczy