Clear Sky Science · es
Predicción y compensación en tiempo real del error de postura de un robot híbrido de 5 grados de libertad basada en rastreador láser y codificadores montados externamente
Por qué importa la precisión del robot
Hoy se espera que los robots industriales perforen, fresen y ensamblen con la misma precisión que las máquinas herramienta de alta gama. Sin embargo, sus brazos se deforman, las articulaciones ceden y las temperaturas cambian, todo lo cual desplaza la herramienta de su trayectoria ideal. Este artículo muestra cómo mantener un complejo robot híbrido de cinco ejes en el blanco en tiempo real combinando dos sistemas de medición distintos y un método matemático de ajuste inteligente.
Dos maneras de vigilar un robot
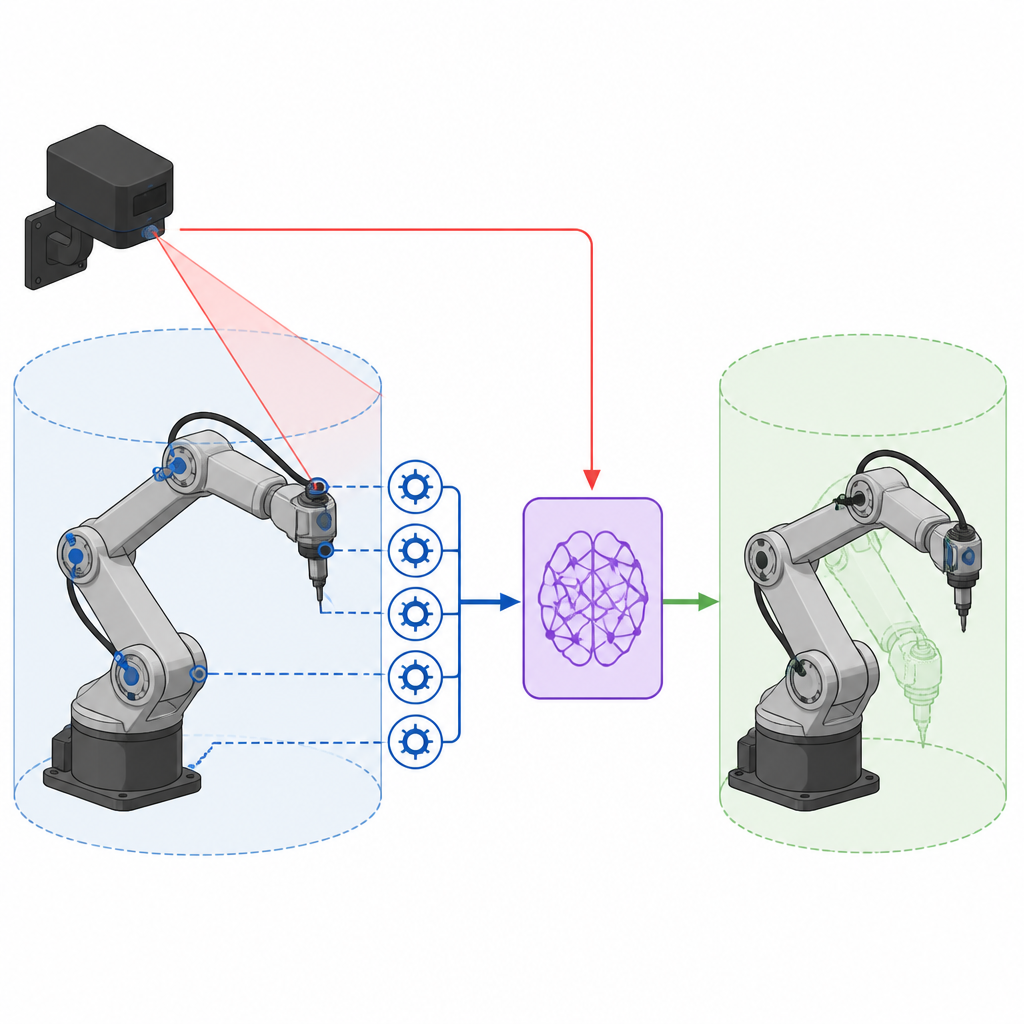
Los autores estudian un robot de mecanizado con cinco grados de libertad llamado TriMule, que mezcla articulaciones paralelas y en serie para mover una herramienta de corte a través de un espacio de trabajo cilíndrico y alto. Comparan dos formas de rastrear la posición real de la herramienta. Una es un rastreador láser colocado fuera del robot que puede localizar dianas reflectantes con precisión extremadamente alta, pero solo de forma lenta y en condiciones controladas. La otra es una cadena de codificadores compactos atornillados directamente a las articulaciones que leen ángulos y deslizamientos en tiempo real durante el mecanizado real, pero infieren la posición de la herramienta indirectamente mediante la geometría del robot y, por tanto, incorporan sus propios errores de instalación y estructurales.
Combinando vistas offline y online
Por sí solos, cada enfoque de medida resulta insuficiente. El rastreador láser ve la herramienta con precisión, pero solo en un número limitado de posturas y, normalmente, sin fuerzas de corte ni cargas cambiantes. La cadena de codificadores supervisa el robot de forma continua, pero no puede igualar la precisión absoluta del láser y se ve afectada por cómo se montan los sensores. La idea clave de este trabajo es tratar el error de postura real como la suma de una parte estática, capturada por el láser durante una campaña de muestreo offline, y una parte dinámica que varía con la carga y las perturbaciones. Al comparar lo que dicen los codificadores durante el muestreo y lo que dicen durante el trabajo real, el método puede estimar cuánto error adicional ha aparecido y corregirlo.
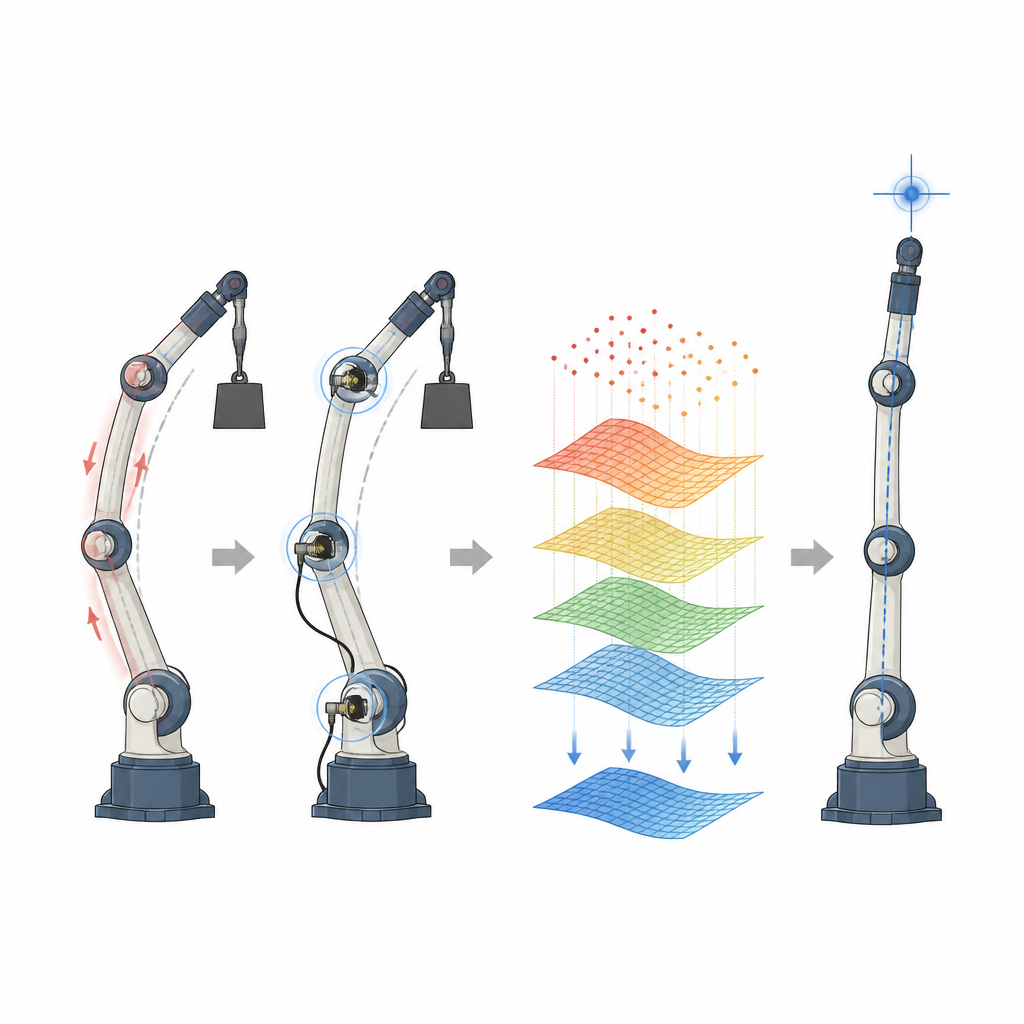
Usar superficies suaves para predecir errores
Para que esta fusión sea práctica en todo el espacio de trabajo, el equipo utiliza una técnica llamada mínimos cuadrados móviles. En lugar de construir un modelo físico detallado de error para cada articulación y eslabón, tratan las posturas del robot en ubicaciones muestreadas como puntos en el espacio con errores conocidos. Los mínimos cuadrados móviles ajustan entonces superficies suaves a través de estos datos de error dispersos, usando ponderación local de modo que las muestras cercanas influyan más en la predicción que las lejanas. La misma forma de función ajustada se aplica a las tres direcciones de posición y a las tres de orientación, lo que simplifica el cálculo dentro del sistema de control numérico del robot.
Correcciones en tiempo real dentro del controlador
Durante el mecanizado, el sistema de control interpola la trayectoria solicitada de la herramienta en pequeños pasos temporales. Con dos ciclos de interpolación de antelación, consulta las superficies de error ajustadas para predecir el error estático en una postura próxima y combina esto con la estimación más reciente, basada en codificadores, del error dinámico en la postura actual. La corrección resultante se aplica a la postura solicitada antes de ejecutar la cinemática inversa y el control servo a nivel de articulación. De este modo, la trayectoria de la herramienta se moldea silenciosamente en el espacio cartesiano mientras los controladores de articulación más rápidos siguen funcionando sin cambios, manteniendo la estabilidad del sistema.
Qué tan bien funciona el método
Los investigadores validan su enfoque mediante experimentos detallados. Primero, muestrean 96 puntos en todo el espacio de trabajo cilíndrico, midiendo la postura de la herramienta con el rastreador láser y con la cadena de codificadores. Observan que el método basado en codificadores por sí solo es menos preciso que el láser, principalmente porque los codificadores miden el movimiento de las articulaciones en lugar de la postura de la herramienta directamente. A continuación, prueban cómo la variación de la carga en la punta de la herramienta altera el posicionamiento. Cuando la carga se reduce, el láser revela desplazamientos pequeños pero importantes que la calibración offline estándar no puede corregir. Al combinar los datos offline del láser con las lecturas online de los codificadores mediante la fórmula propuesta y el ajuste por mínimos cuadrados móviles, el método captura aproximadamente el 61 por ciento de estos errores dinámicos y mantiene la diferencia entre errores predichos y reales dentro de aproximadamente un 5 por ciento bajo carga constante.
Qué significa esto para los robots del futuro
Para el lector general, la conclusión es que los autores han encontrado una forma práctica de mantener honesto un brazo robot flexible mientras trabaja. Enseñando al robot sus imperfecciones estáticas mediante un instrumento preciso pero lento, y luego dejando que codificadores económicos sigan cómo cambian esas imperfecciones bajo fuerzas reales, pueden guiar la herramienta más cerca de donde debería estar en tiempo real. Esta estrategia podría adaptarse a otros robots y máquinas herramienta, ofreciendo una vía hacia una fabricación automatizada más precisa sin tener que construir máquinas perfectamente rígidas.
Cita: Guo, H., Li, G. & Liu, S. Pose error real-time prediction and compensation of a 5-DOF hybrid robot based on laser tracker and externally mounted encoders. Sci Rep 16, 15365 (2026). https://doi.org/10.1038/s41598-026-42162-2
Palabras clave: precisión del robot, compensación de errores, rastreador láser, codificadores externos, robot de mecanizado híbrido