Clear Sky Science · fr
Prédiction et compensation en temps réel de l’erreur de pose d’un robot hybride 5-DOF basée sur un traceur laser et des encodeurs montés en externe
Pourquoi la précision des robots compte
Les robots industriels sont désormais sollicités pour percer, fraiser et assembler avec la même précision que des machines-outils haut de gamme. Pourtant leurs bras fléchissent, les articulations se déforment et les températures varient, autant de phénomènes qui éloignent l’outil de sa trajectoire idéale. Cet article montre comment maintenir en temps réel un robot hybride complexe à cinq axes sur sa cible en combinant deux systèmes de mesure différents et une méthode mathématique d’ajustement ingénieuse.
Deux façons de surveiller un robot
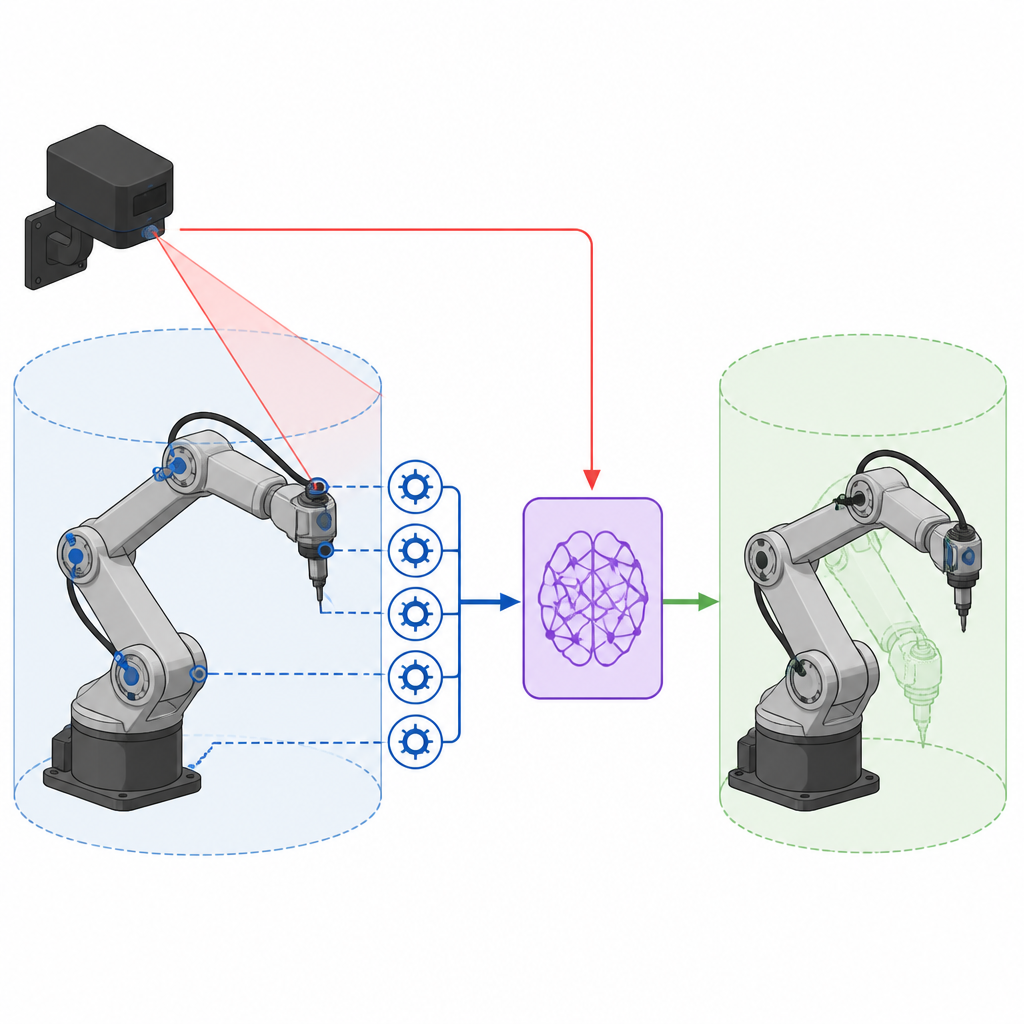
Les auteurs étudient un robot d’usinage particulier à cinq degrés de liberté nommé TriMule, qui associe des liaisons parallèles et série pour déplacer un outil de coupe dans un espace de travail cylindrique et élevé. Ils comparent deux manières de localiser la position réelle de l’outil. La première utilise un traceur laser placé à l’extérieur du robot capable de localiser des cibles réfléchissantes avec une très grande précision, mais seulement lentement et dans des conditions contrôlées. La seconde consiste en une chaîne d’encodeurs compacts boulonnés directement sur les articulations qui lisent les angles et les glissements en temps réel pendant l’usinage, mais qui infèrent la position de l’outil indirectement via la géométrie du robot et portent donc leurs propres erreurs d’installation et structurelles.
Combiner vues hors ligne et en ligne
Pris séparément, chaque mode de mesure montre ses limites. Le traceur laser voit l’outil avec précision, mais seulement pour un nombre limité de poses et généralement sans forces de coupe ni charges variables. La chaîne d’encodeurs surveille le robot en continu, mais ne peut égaler la précision absolue du laser et dépend du montage des capteurs. L’idée clé de ce travail est de considérer l’erreur de pose réelle comme la somme d’une composante statique, capturée par le laser lors d’une campagne d’échantillonnage hors ligne, et d’une composante dynamique qui varie avec la charge et les perturbations. En comparant les lectures des encodeurs pendant l’échantillonnage et pendant le travail réel, la méthode estime l’erreur dynamique supplémentaire apparue et la corrige.
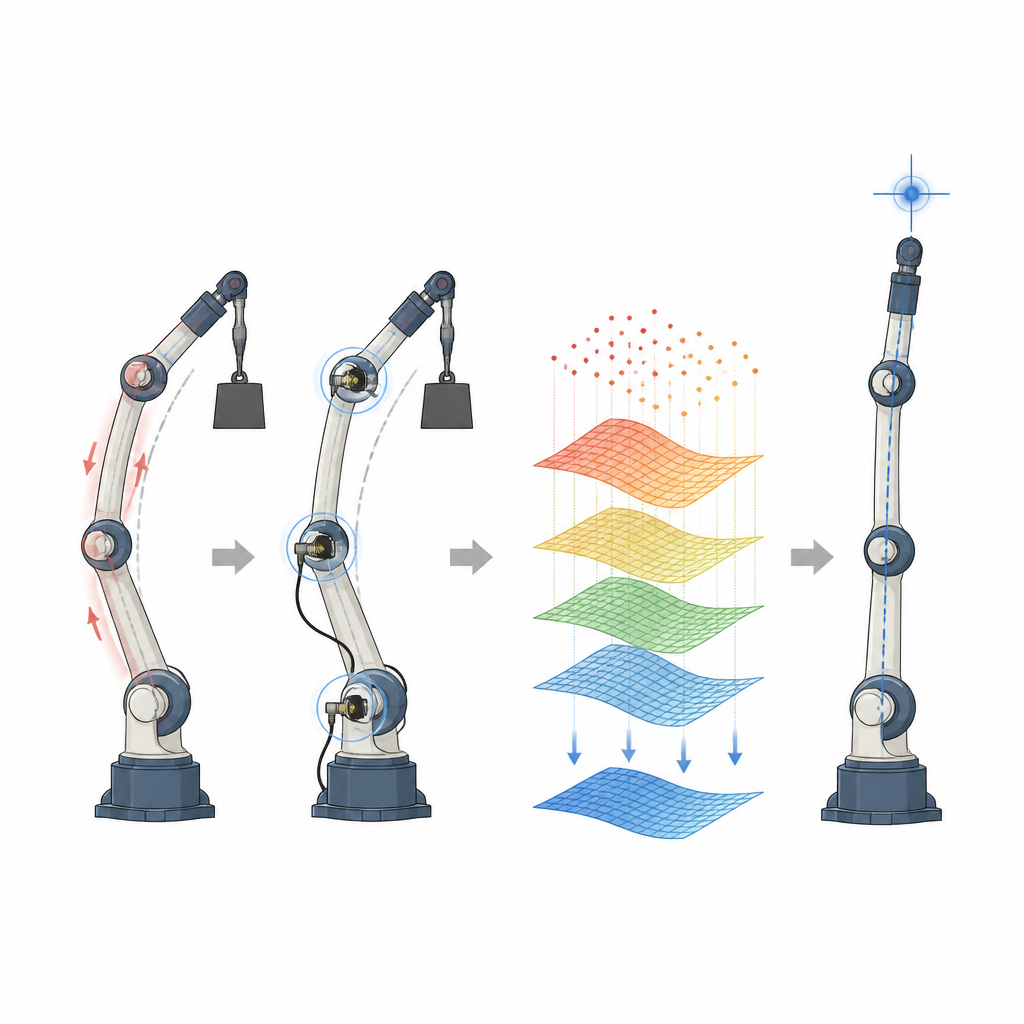
Utiliser des surfaces lisses pour prédire les erreurs
Pour rendre cette fusion applicable sur l’ensemble de l’espace de travail, l’équipe utilise une technique appelée moindres carrés mobiles. Plutôt que de construire un modèle physique détaillé de l’erreur de chaque articulation et liaison, ils considèrent les poses robotisées aux points échantillonnés comme des points dans l’espace avec des erreurs connues. Les moindres carrés mobiles ajustent alors des surfaces lisses à travers ces données d’erreur dispersées, en utilisant un pondération locale de sorte que les échantillons proches influencent la prédiction davantage que les échantillons lointains. La même forme de fonction ajustée est utilisée pour les trois directions de position et les trois directions d’orientation, ce qui simplifie les calculs à l’intérieur du système de commande numérique du robot.
Corrections en temps réel à l’intérieur du contrôleur
Pendant l’usinage, le système de commande interpole la trajectoire d’outil commandée par petits pas de temps. Deux cycles d’interpolation à l’avance, il interroge les surfaces d’erreur ajustées pour prédire l’erreur statique à une pose à venir et la combine avec la dernière estimation d’erreur dynamique basée sur les encodeurs à la pose courante. La correction résultante est appliquée à la pose commandée avant le calcul des cinématiques inverses et la commande servo des articulations. Ainsi, la trajectoire de l’outil est discrètement remodelée dans l’espace cartésien tandis que les régulateurs d’articulation plus rapides continuent de fonctionner inchangés, préservant la stabilité du système.
Quelle est l’efficacité de la méthode
Les chercheurs valident leur approche par des expériences détaillées. D’abord, ils échantillonnent 96 points dans l’ensemble de l’espace de travail cylindrique, mesurant la pose de l’outil avec le traceur laser et la chaîne d’encodeurs. Ils constatent que la méthode basée sur les encodeurs seule est moins précise que le laser, principalement parce que les encodeurs mesurent le mouvement des articulations et non la pose de l’outil directement. Ensuite, ils testent l’effet des variations de charge à la pointe de l’outil sur le positionnement. Quand la charge diminue, le laser révèle de petits mais importants déplacements qu’une calibration hors ligne standard ne corrige pas. En combinant les données laser hors ligne avec les lectures d’encodeurs en ligne via la formule proposée et le fitting par moindres carrés mobiles, la méthode capture environ 61 % de ces erreurs dynamiques et maintient la différence entre erreurs prédites et réelles dans l’ordre de 5 % environ sous charge constante.
Ce que cela signifie pour les robots futurs
Pour un lecteur non spécialiste, la conclusion est que les auteurs ont trouvé un moyen pratique de maintenir un bras robotique flexible fidèle à sa trajectoire pendant son fonctionnement. En enseignant au robot ses imperfections statiques à l’aide d’un instrument précis mais lent, puis en laissant des encodeurs peu coûteux suivre la variation de ces imperfections sous forces réelles, ils peuvent rapprocher l’outil de l’endroit où il doit se trouver en temps réel. Cette stratégie pourrait être adaptée à d’autres robots et machines-outils, offrant une voie vers une fabrication automatisée plus précise sans avoir à construire des machines parfaitement rigides.
Citation: Guo, H., Li, G. & Liu, S. Pose error real-time prediction and compensation of a 5-DOF hybrid robot based on laser tracker and externally mounted encoders. Sci Rep 16, 15365 (2026). https://doi.org/10.1038/s41598-026-42162-2
Mots-clés: précision des robots, compensation d’erreur, traceur laser, encodeurs externes, robot d’usinage hybride