Clear Sky Science · sv
Real-tidsprognos och kompensation av poseringsfel för en 5-DOF hybridrobot baserad på laser-tracker och externa enkodrar
Varför robotnoggrannhet spelar roll
Industrirobotar förväntas nu borra, fräsa och montera med samma precision som högklassiga maskinverktyg. Samtidigt böjer sig deras armar, leder flexar och temperaturer driver drift, vilket alla förflyttar verktyget från dess ideala bana. Denna artikel visar hur man håller en komplex femaxlig hybridrobot på målet i realtid genom att kombinera två olika mätsystem och en smart matematisk passningsmetod.
Två sätt att övervaka en robot
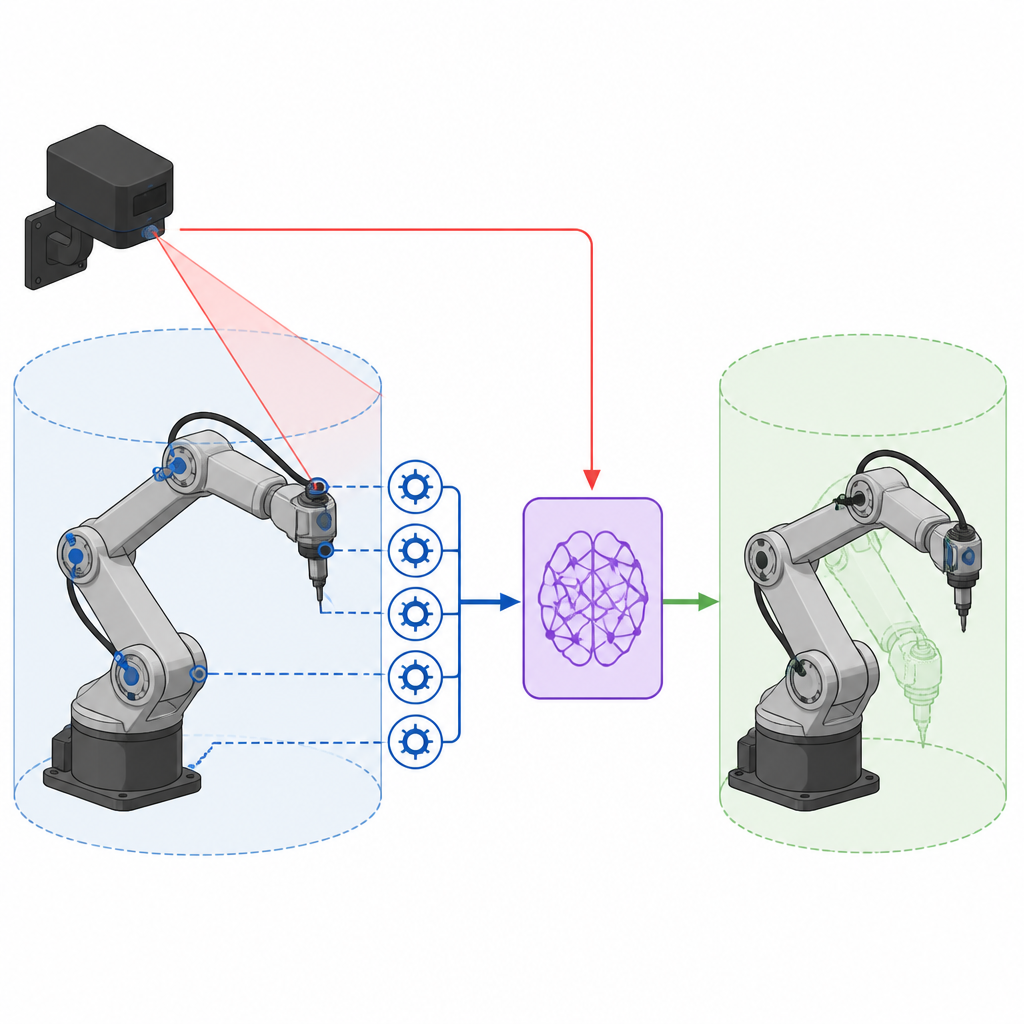
Författarna studerar en särskild fem frihetsgrad bearbetningsrobot kallad TriMule, som blandar parallella och seriekopplade leder för att förflytta ett skärverktyg genom ett högt cylindriskt arbetsområde. De jämför två sätt att följa var verktyget faktiskt befinner sig. Det ena är en laser-tracker placerad utanför roboten som kan lokalisera reflekterande mål med extremt hög noggrannhet, men endast långsamt och under kontrollerade förhållanden. Det andra är en kedja av kompakta enkodrar bultade direkt på lederna som läser vinklar och slids i realtid under verklig bearbetning, men som härleder verktygspositionen indirekt genom robotens geometri och därför bär på egna monterings- och strukturella fel.
Att blanda offline- och onlinevyer
Var för sig räcker ingen av mätmetoderna till. Laser-trackern ser verktyget precist, men endast i ett begränsat antal poser och typiskt utan skärkrafter eller varierande belastning. Enkodarkedjan övervakar roboten kontinuerligt, men kan inte matcha laserens absoluta noggrannhet och påverkas av hur sensorerna är monterade. Kärn idén i detta arbete är att behandla det sanna poseringsfelet som summan av en statisk del, fångad av lasern under en offline provningskampanj, och en dynamisk del som förändras med last och störning. Genom att jämföra vad enkodrarna rapporterar under provtagningen med vad de rapporterar under verkligt arbete kan metoden uppskatta hur mycket ytterligare fel som tillkommit och kompensera för det.
Använda släta ytor för att förutsäga fel
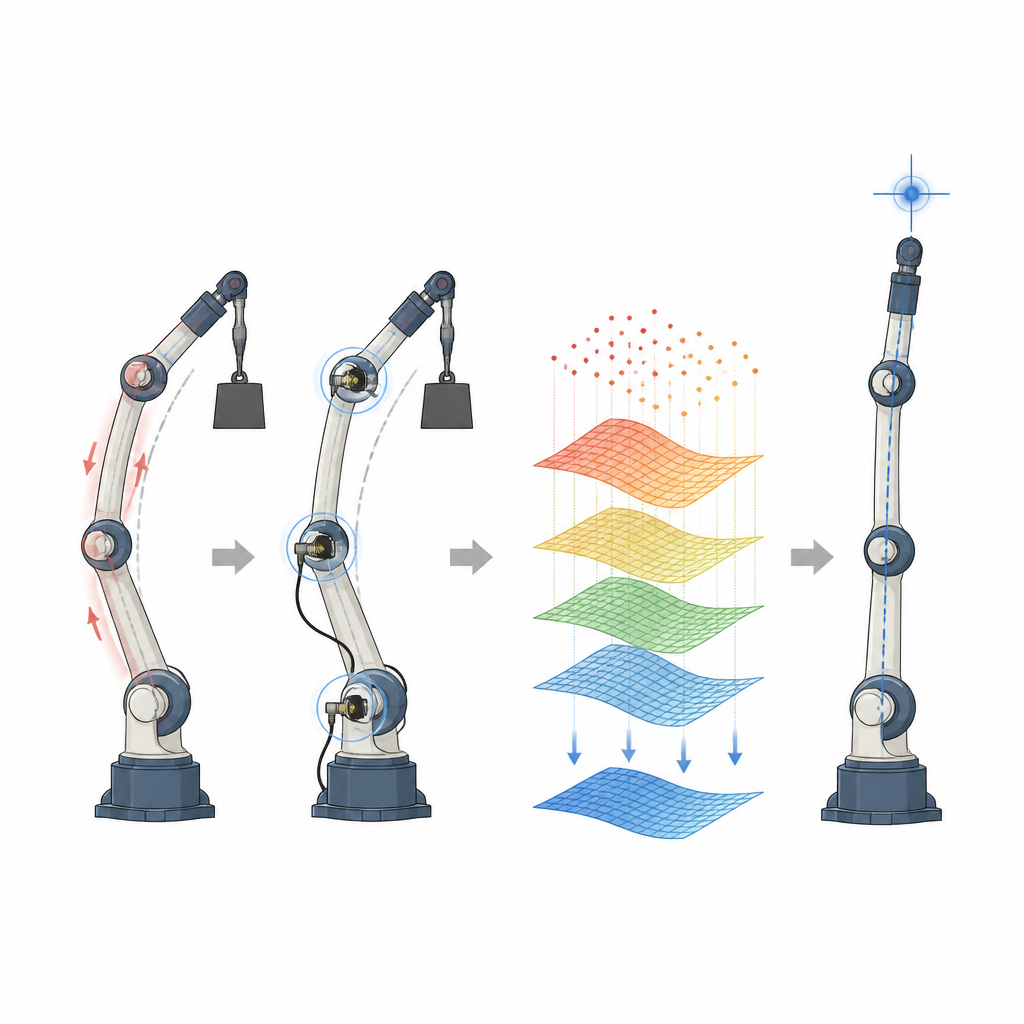
För att göra denna fusion praktisk över hela arbetsområdet använder teamet en teknik kallad moving least squares. Istället för att bygga en detaljerad fysisk felmodell för varje led och länk behandlar de robotposeringar vid provtagna punkter som punkter i rymden med kända fel. Moving least squares passar sedan släta ytor genom dessa spridda feldata och använder lokal viktning så att närliggande prover påverkar prediktionen mer än avlägsna. Samma form av den passade funktionen används för alla tre positionsriktningar och alla tre orientationsriktningar, vilket förenklar beräkningen inne i robotens numeriska styrsystem.
Realtidskorrigeringar inne i styrningen
Under bearbetning interpolerar styrsystemet den kommenderade verktygsbanan i små tidsteg. Två interpolationscykler framåt frågar det de passade felytorna för att förutsäga det statiska felet vid en kommande pose och kombinerar detta med den senaste enkoderbaserade uppskattningen av dynamiskt fel vid aktuell pose. Den resulterande korrigeringen appliceras på den kommenderade posen innan invers kinematik och servo styrning på ledernivå körs. På detta sätt omformas verktygsbanan tyst i kartesisk rymd medan de snabbare ledeservona fortsätter oförändrade, vilket bevarar systemets stabilitet.
Hur väl metoden fungerar
Forskarna validerar sin metod genom detaljerade experiment. Först provtar de 96 punkter genom det cylindriska arbetsområdet och mäter verktygsposen med både laser-trackern och enkodarkedjan. De konstaterar att enkoderbaserad metod ensam är mindre noggrann än lasern, främst eftersom enkodrar mäter led rörelser istället för verktygspos direkt. Därefter testar de hur förändrad last vid verktygsspetsen påverkar positioneringen. När lasten minskas avslöjar lasern små men viktiga skift som standard offline-kalibrering inte kan korrigera. Genom att kombinera offline laserdata med online enkoderavläsningar via den föreslagna formeln och moving least squares-passningen fångar metoden ungefär 61 procent av dessa dynamiska fel och håller skillnaden mellan förutsagda och faktiska fel inom cirka 5 procent under konstant last.
Vad detta betyder för framtida robotar
För en allmän läsare är slutsatsen att författarna funnit ett praktiskt sätt att hålla en flexibel robotarm ärlig medan den arbetar. Genom att lära roboten om dess statiska imperfektioner med ett precist men långsamt instrument, och sedan låta billiga enkodrar följa hur dessa imperfektioner förändras under verkliga krafter, kan de styra verktyget närmare där det borde vara i realtid. Denna strategi kan anpassas till andra robotar och maskinverktyg och erbjuda en väg mot mer noggrann automatiserad tillverkning utan att behöva bygga perfekt stela maskiner.
Citering: Guo, H., Li, G. & Liu, S. Pose error real-time prediction and compensation of a 5-DOF hybrid robot based on laser tracker and externally mounted encoders. Sci Rep 16, 15365 (2026). https://doi.org/10.1038/s41598-026-42162-2
Nyckelord: robotnoggrannhet, felkompensation, laser-tracker, externa enkodrar, hybrid bearbetningsrobot