Clear Sky Science · it
Predizione e compensazione in tempo reale dell’errore di posa di un robot 5-DOF ibrido basata su laser tracker ed encoder montati esternamente
Perché l’accuratezza del robot è importante
I robot industriali sono oggi chiamati a forare, fresare e assemblare con la stessa precisione degli utensili di alta gamma. Tuttavia i loro bracci si flettono, i giunti cedono e le temperature cambiano, spostando l’utensile rispetto alla traiettoria ideale. Questo articolo mostra come mantenere un robot 5‑assi ibrido complesso sul bersaglio in tempo reale combinando due diversi sistemi di misura e un metodo matematico intelligente di adattamento.
Due modi per osservare un robot
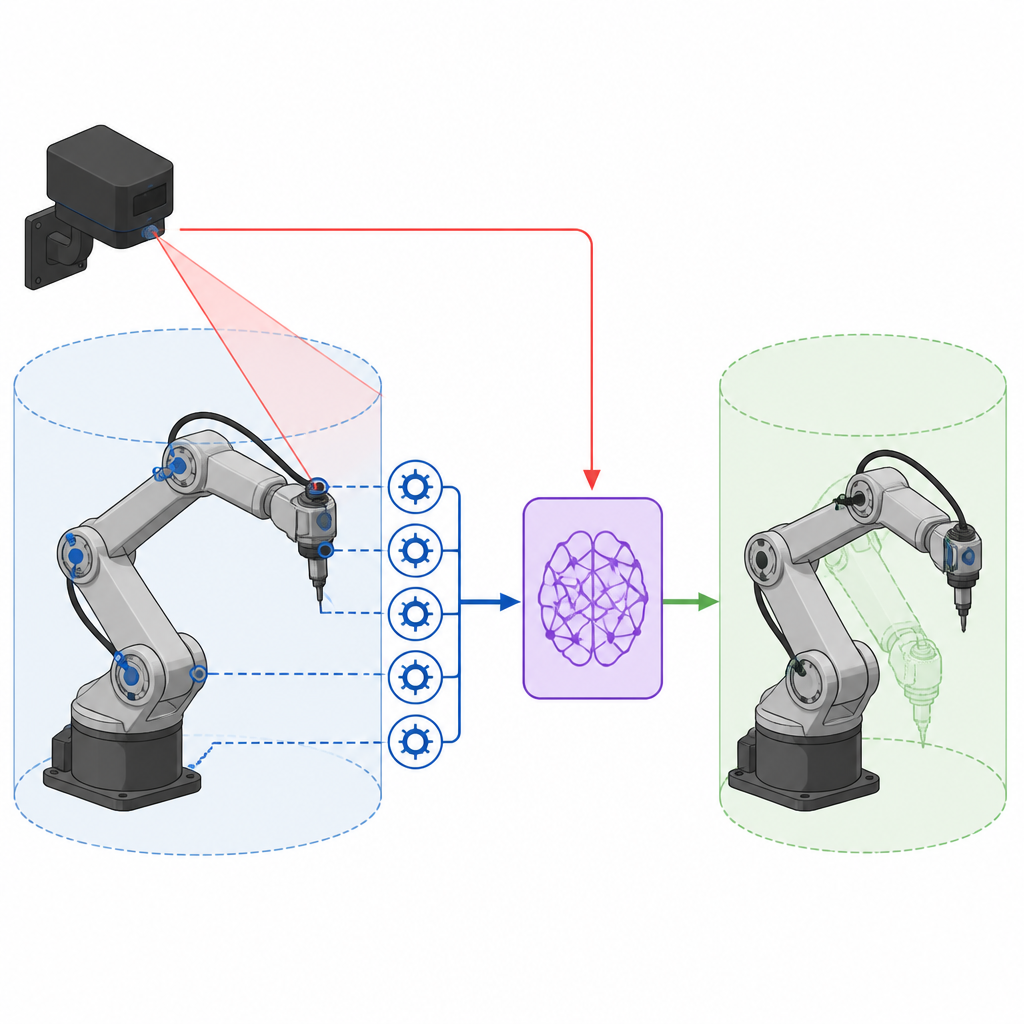
Gli autori studiano un robot di lavorazione speciale a cinque gradi di libertà chiamato TriMule, che combina giunti paralleli e seriali per muovere un utensile attraverso un ampio spazio di lavoro cilindrico. Confrontano due modalità per tracciare la posizione reale dell’utensile. Una è un laser tracker posizionato esternamente che può localizzare bersagli riflettenti con precisione molto elevata, ma solo lentamente e in condizioni controllate. L’altra è una catena di encoder compatti avvitati direttamente ai giunti che leggono angoli e scorrimenti in tempo reale durante la lavorazione effettiva, ma ricavano la posizione dell’utensile indirettamente tramite la cinematica del robot e quindi portano con sé errori di installazione e strutturali.
Fondere viste offline e online
Da sole, entrambe le modalità di misura hanno limiti. Il laser tracker osserva l’utensile con precisione ma solo in un numero limitato di pose e tipicamente senza le forze di taglio o carichi variabili. La catena di encoder monitora il robot in modo continuo, ma non raggiunge l’accuratezza assoluta del laser ed è influenzata dal modo in cui i sensori sono montati. L’idea chiave di questo lavoro è trattare l’errore di posa reale come la somma di una parte statica, catturata dal laser durante una campagna di campionamento offline, e di una parte dinamica che cambia con il carico e le perturbazioni. Confrontando ciò che dicono gli encoder durante il campionamento e durante il lavoro reale, il metodo stima quanto errore aggiuntivo sia comparso e lo compensa.
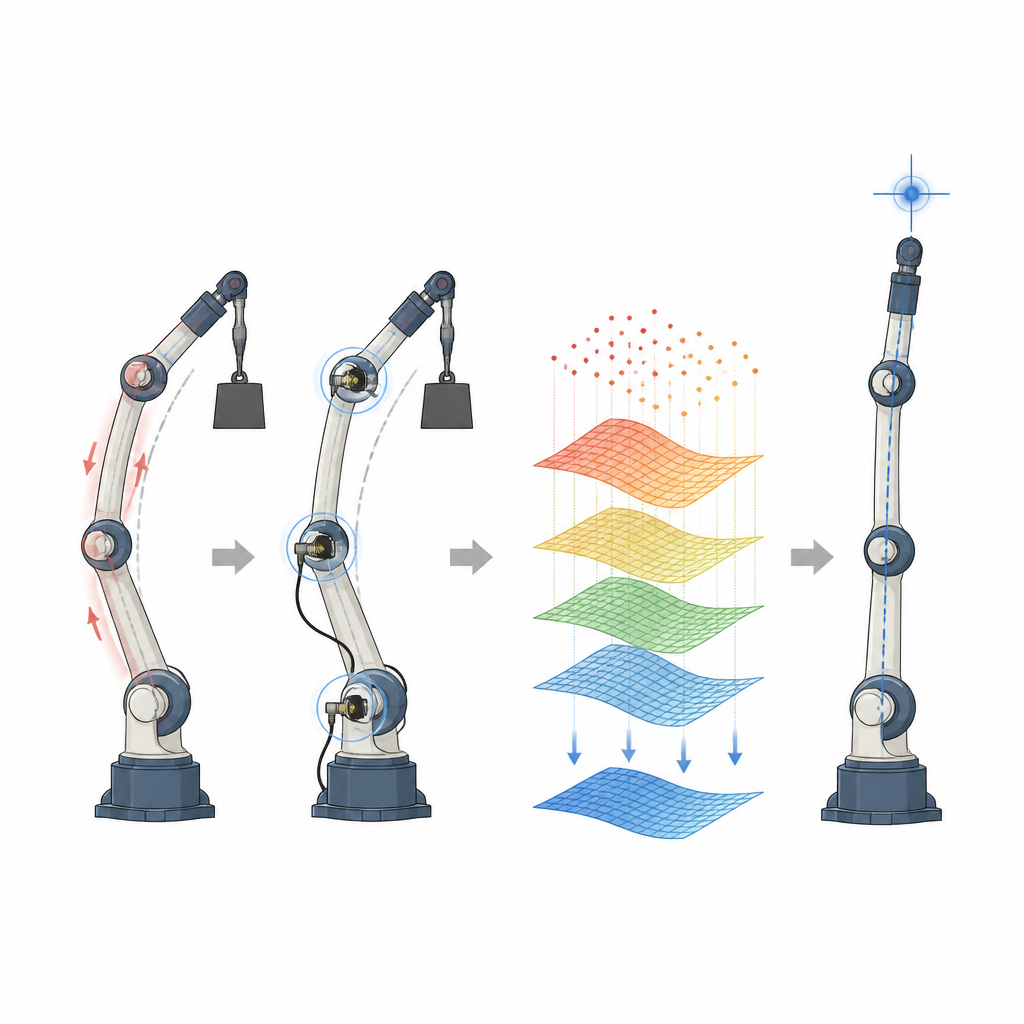
Usare superfici lisce per prevedere gli errori
Per rendere pratica questa fusione su tutto lo spazio di lavoro, il gruppo usa una tecnica chiamata moving least squares. Invece di costruire un dettagliato modello fisico d’errore per ogni giunto e collegamento, trattano le pose campionate come punti nello spazio con errori noti. Il moving least squares adatta quindi superfici lisce attraverso questi dati d’errore sparsi, usando pesature locali in modo che i campioni vicini influenzino la predizione più di quelli lontani. La stessa forma di funzione adattata è usata per tutte e tre le direzioni di posizione e per tutte e tre le direzioni di orientamento, semplificando i calcoli all’interno del sistema di controllo numerico del robot.
Correzioni in tempo reale all’interno del controllore
Durante la lavorazione, il sistema di controllo interpola la traiettoria comandata dell’utensile in piccoli passi temporali. Con due cicli di interpolazione di anticipo, interroga le superfici d’errore adattate per prevedere l’errore statico in una posa futura e lo combina con l’ultima stima basata sugli encoder dell’errore dinamico nella posa corrente. La correzione risultante viene applicata alla posa comandata prima che vengano eseguite le cinematica inversa e il controllo servo a livello di giunto. In questo modo la traiettoria dell’utensile viene silenziosamente rimodellata nello spazio cartesiano mentre i più rapidi controllori di giunto procedono invariati, mantenendo la stabilità del sistema.
Quanto bene funziona il metodo
I ricercatori convalidano il loro approccio attraverso esperimenti dettagliati. Innanzitutto, campionano 96 punti nell’intero spazio di lavoro cilindrico, misurando la posa dell’utensile sia con il laser tracker sia con la catena di encoder. Riscontrano che il metodo basato solo sugli encoder è meno accurato del laser, principalmente perché gli encoder misurano il moto dei giunti piuttosto che la posa dell’utensile direttamente. Poi valutano come la variazione del carico sulla punta dell’utensile altera il posizionamento. Quando il carico è ridotto, il laser rivela spostamenti piccoli ma significativi che la calibrazione offline standard non può correggere. Combinando i dati offline del laser con le letture online degli encoder mediante la formula proposta e l’adattamento con moving least squares, il metodo cattura circa il 61 percento di questi errori dinamici e mantiene la differenza tra errore predetto e reale nell’ordine di circa il 5 percento sotto carico costante.
Cosa significa per i robot del futuro
Per un lettore non esperto, la conclusione è che gli autori hanno trovato un modo pratico per mantenere onesto un braccio robotico flessibile mentre lavora. Insegnando al robot le sue imperfezioni statiche usando uno strumento preciso ma lento e poi lasciando che encoder economici traccino come tali imperfezioni cambiano sotto forze reali, è possibile avvicinare l’utensile al punto dove dovrebbe essere in tempo reale. Questa strategia potrebbe essere adattata ad altri robot e macchine utensili, offrendo una strada verso processi di produzione automatizzati più accurati senza dover costruire macchine perfettamente rigide.
Citazione: Guo, H., Li, G. & Liu, S. Pose error real-time prediction and compensation of a 5-DOF hybrid robot based on laser tracker and externally mounted encoders. Sci Rep 16, 15365 (2026). https://doi.org/10.1038/s41598-026-42162-2
Parole chiave: accuratezza del robot, compensazione degli errori, laser tracker, encoder esterni, robot da lavorazione ibrido