Clear Sky Science · pt
Previsão e compensação em tempo real do erro de pose de um robô híbrido de 5 GDL com base em rastreador a laser e encoders montados externamente
Por que a precisão do robô importa
Robôs industriais hoje são solicitados a furar, fresar e montar com a mesma precisão de máquinas-ferramenta de alto nível. Ainda assim, seus braços flexionam, juntas cedem e temperaturas variam, tudo isso desviando a ferramenta de sua trajetória ideal. Este artigo mostra como manter um robô híbrido complexo de cinco eixos no alvo em tempo real ao combinar dois sistemas de medição diferentes e um método matemático de ajuste engenhoso.
Duas formas de observar um robô
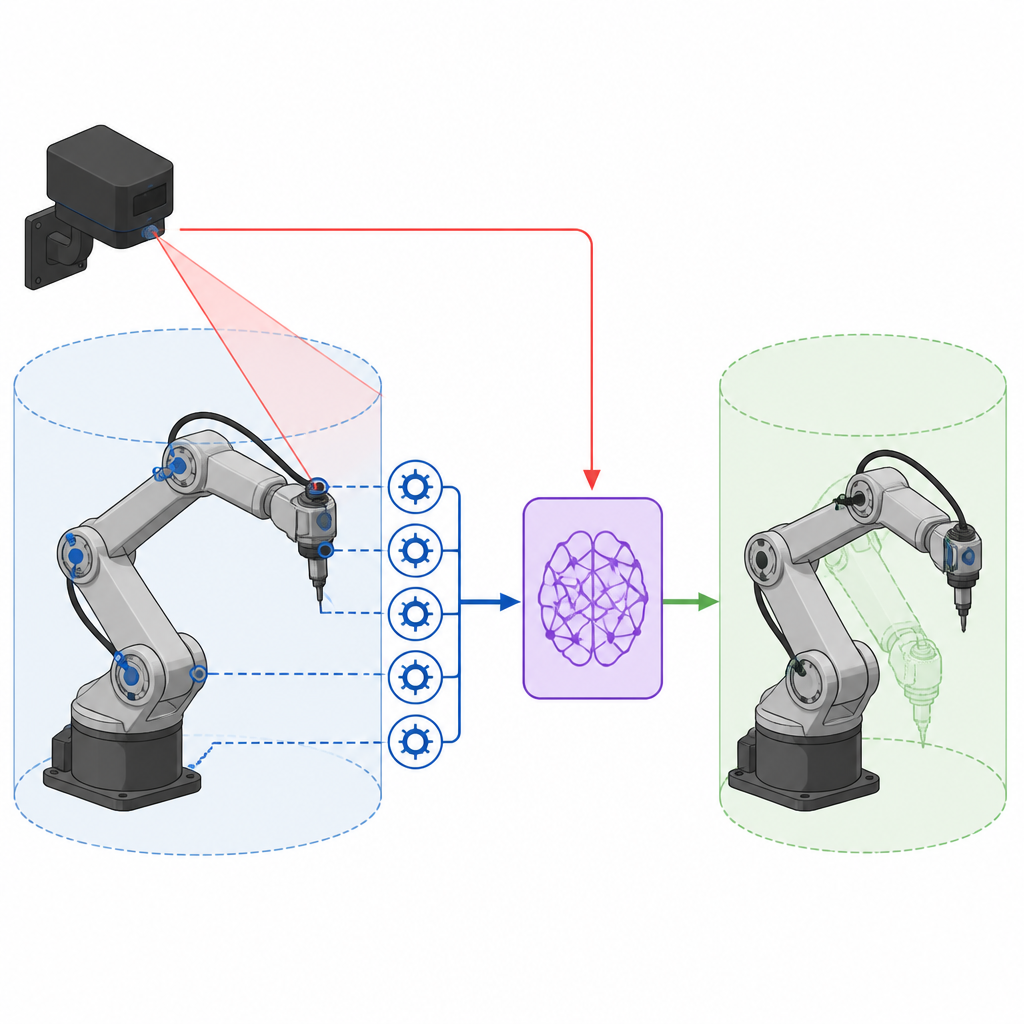
Os autores estudam um robô de usinagem especial de cinco graus de liberdade chamado TriMule, que mistura juntas paralelas e seriais para mover uma ferramenta de corte por um espaço de trabalho cilíndrico e alto. Eles comparam duas maneiras de rastrear onde a ferramenta realmente está. Uma é um rastreador a laser colocado fora do robô que pode localizar alvos reflexivos com precisão extrema, porém de forma lenta e apenas em condições controladas. A outra é uma cadeia de encoders compactos parafusados diretamente nas juntas que leem ângulos e deslizamentos em tempo real durante a usinagem real, mas inferem a posição da ferramenta de forma indireta pela geometria do robô e, portanto, carregam seus próprios erros de instalação e estruturais.
Mesclando visões offline e online
Isoladamente, cada abordagem de medição tem limitações. O rastreador a laser vê a ferramenta com precisão, mas apenas em um número limitado de poses e tipicamente sem forças de corte ou variação de carga. A cadeia de encoders monitora o robô continuamente, mas não alcança a exatidão absoluta do laser e é afetada pela forma como os sensores são montados. A ideia-chave deste trabalho é tratar o erro de pose verdadeiro como a soma de uma parte estática, capturada pelo laser durante uma campanha de amostragem offline, e uma parte dinâmica que muda com carga e perturbações. Ao comparar o que os encoders indicam durante a amostragem com o que indicam durante o trabalho real, o método pode estimar quanto erro adicional surgiu e corrigi-lo.
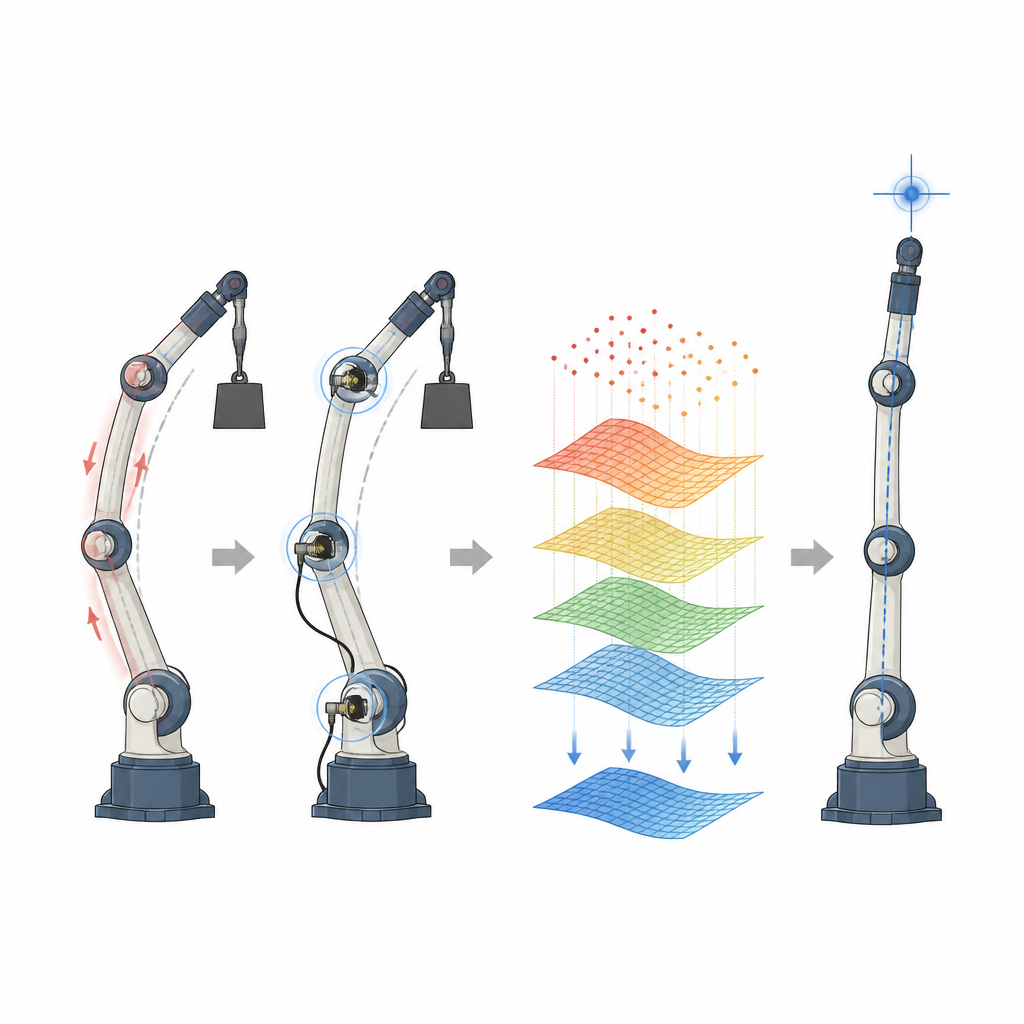
Usando superfícies suaves para prever erros
Para tornar essa fusão prática em todo o espaço de trabalho, a equipe usa uma técnica chamada mínimos quadrados móveis. Em vez de construir um modelo físico detalhado de erro para cada junta e elo, eles tratam as poses do robô em locais amostrados como pontos no espaço com erros conhecidos. Os mínimos quadrados móveis ajustam então superfícies suaves através desses dados dispersos de erro, usando ponderação local para que amostras próximas influenciem a previsão mais do que as distantes. A mesma forma de função ajustada é usada para as três direções de posição e para as três direções de orientação, o que simplifica o cálculo dentro do sistema de controle numérico do robô.
Correções em tempo real dentro do controlador
Durante a usinagem, o sistema de controle interpola a trajetória comandada da ferramenta em pequenos passos de tempo. Dois ciclos de interpolação à frente, ele consulta as superfícies de erro ajustadas para prever o erro estático em uma pose futura e combina isso com a estimativa mais recente baseada em encoders do erro dinâmico na pose atual. A correção resultante é aplicada à pose comandada antes que a cinemática inversa e o controle servo a nível de junta sejam executados. Desta forma, a trajetória da ferramenta é discretamente remodelada em espaço cartesiano enquanto os controladores de junta mais rápidos continuam inalterados, mantendo a estabilidade do sistema.
Quão bem o método funciona
Os pesquisadores validam sua abordagem por meio de experimentos detalhados. Primeiro, eles amostram 96 pontos por todo o espaço de trabalho cilíndrico, medindo a pose da ferramenta tanto com o rastreador a laser quanto com a cadeia de encoders. Eles constatam que o método baseado em encoders sozinho é menos preciso que o laser, principalmente porque os encoders medem o movimento das juntas e não a pose da ferramenta diretamente. Em seguida, testam como a variação da carga na ponta da ferramenta altera o posicionamento. Quando a carga é reduzida, o laser revela pequenas porém importantes deslocações que a calibração offline padrão não consegue corrigir. Ao combinar dados offline do laser com leituras online dos encoders por meio da fórmula proposta e do ajuste por mínimos quadrados móveis, o método captura cerca de 61% desses erros dinâmicos e mantém a diferença entre erros previstos e reais dentro de aproximadamente 5% sob carga constante.
O que isso significa para robôs futuros
Para um leitor não especialista, a conclusão é que os autores encontraram uma maneira prática de manter um braço robótico flexível preciso enquanto trabalha. Ao ensinar o robô sobre suas imperfeições estáticas usando um instrumento preciso porém lento, e então permitir que encoders econômicos rastreiem como essas imperfeições mudam sob forças reais, eles conseguem conduzir a ferramenta mais perto de onde ela deve estar em tempo real. Essa estratégia pode ser adaptada para outros robôs e máquinas-ferramenta, oferecendo um caminho para uma fabricação automatizada mais precisa sem a necessidade de construir máquinas perfeitamente rígidas.
Citação: Guo, H., Li, G. & Liu, S. Pose error real-time prediction and compensation of a 5-DOF hybrid robot based on laser tracker and externally mounted encoders. Sci Rep 16, 15365 (2026). https://doi.org/10.1038/s41598-026-42162-2
Palavras-chave: precisão de robô, compensação de erro, rastreador a laser, encoders externos, robô de usinagem híbrido