Clear Sky Science · zh
实时分散模型预测控制用于合作多机器人搬运:实验验证
机器人协同搬运重物
想象一个仓库,那里不是人而是小型移动机器人协作将箱子绕过狭窄拐角并穿行于货架之间——它们不会相撞,也不会撞到附近障碍物。本文展示了两台这样的机器人如何在实时条件下共享一件重物并平稳、安全地移动它,即便其传感器有噪声且对环境的感知并不完美。
为什么分摊负载很难
让多台机器人共同搬运同一物体,比告诉单台机器人该去哪里要困难得多。机器需要就共享负载的位置达成一致,保持彼此之间的安全距离,并避免碰撞墙壁或障碍物,同时对变化做出快速反应。传统方法通常依赖一个能够看到全局并告诉每台机器人如何行动的中央计算机。这种设置容易脆弱:一旦中央“大脑”或通信链路故障,整个团队可能瘫痪。作者在文中探讨了一种“分散式”方法,其中每台机器人自行决策,但仍作为协调团队的一部分行动。
真实世界中的机器人对
为验证他们的想法,研究者搭建了一个物理实验平台,使用了两台现成的小型机器人,称为 TurtleBot3。每台机器人有两只驱动轮,并承载着轻质亚克力平台的一部分。两台机器人通过专门设计的关节连接到共享平台,这些关节既能旋转又能伸缩,模拟真实物体在团队搬运时可能产生的弯曲或位移。机器人在一个大约客厅大小的室内区域中移动,地面标有视觉标签,辅助架空摄像头确定各物体的位置。
移动中的感知与决策
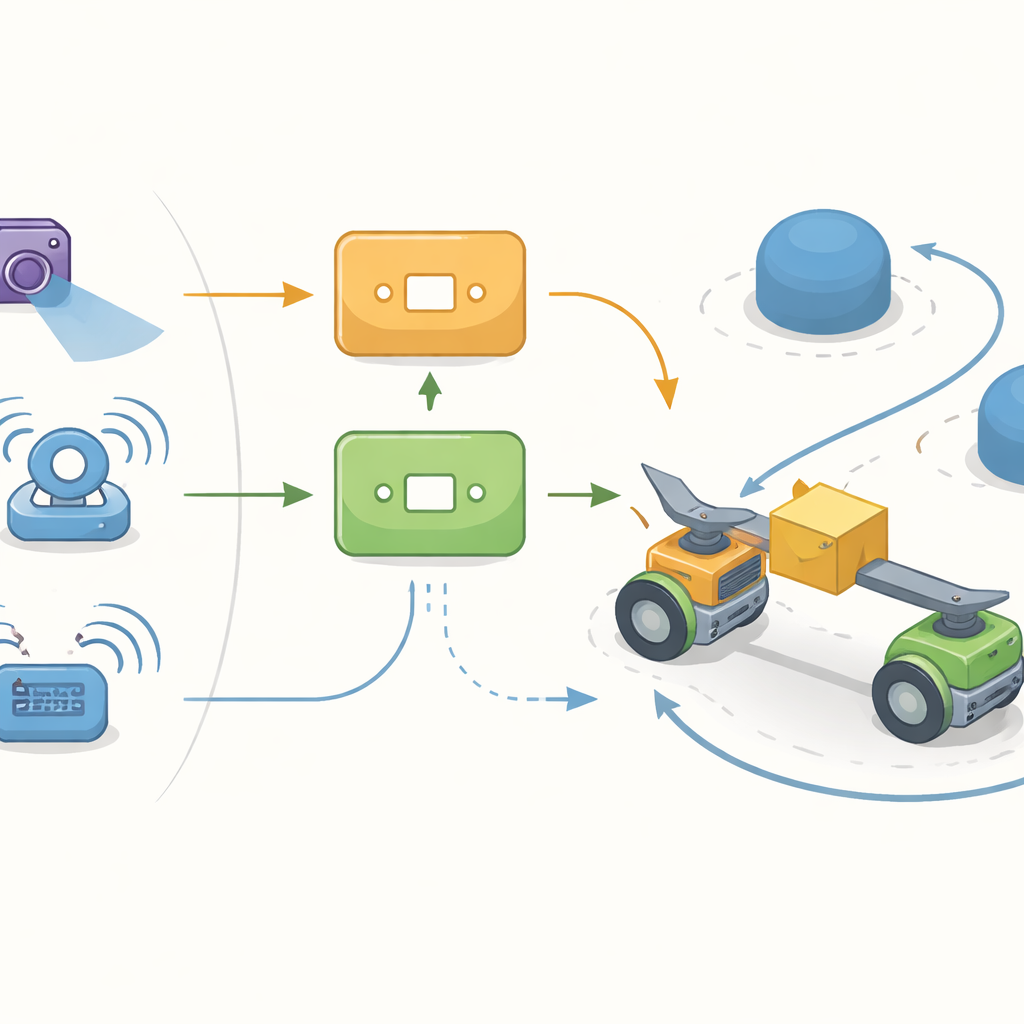
仅靠视觉并不完美:架空摄像头有时会短暂看不见机器人,而且其测量存在延迟。为了实时跟踪共享负载,系统把摄像头信息与车轮编码器和每台机器人上的微型惯性传感器读数融合在一起。一种数学滤波方法将这些信号平滑成对被携带物体位置与运动状态的可靠估计。在这一感知层之上,每台机器人运行自己的预测控制器。控制器不只对当下作出反应,而是向前预测短时间内的情况,将可能的运动选择与安全约束(如速度界限、机器人之间的间距以及与障碍物的最小允许距离)进行比对。
无需持续通信的协作
尽管机器人必须协作,但它们并不持续通信。只有当相对间距或朝向偏离预期太远时,才会交换信息。在这些通信间歇期间,每台机器人使用对同伴的最后一次观测,并内置安全裕度以避免碰撞。控制器还会动态调整自身的优先级:当期望路径急转弯或附近有障碍时,它会自动更侧重于保持接近规划路径并维持队形紧凑,而相对降低尽可能平缓运动的权重;当路径变直时,则放宽这些优先级,以减轻电机负担并保持运动平顺。
将方法投入测试
研究团队让机器人执行一系列试验:从一点移动到另一点、绘制直线和圆形,并在有无障碍的情况下沿无限符号形路径行进。在每种情况下,他们将基础版本的控制器与能自适应重新调优优先级的控制器进行了比较。自适应策略使被携带平台更接近目标路径——精度提高了大约五分之一到三分之一——同时仍满足关于间距、关节伸展以及车轮速度或加速度变化的所有安全限制。即便在一台算力有限的计算机上,每台机器人也能快速完成计算,以每秒十次的频率更新其运动决策,留有足够的余量以实现实时运行。
对未来机器人团队的意义
对非专业读者来说,核心结论是:现在小而便宜的机器人团队能够在不依赖单一中央控制器的情况下,安全且精确地搬运共享负载成为可行方案。通过融合摄像头与车载传感器数据,并让每台机器人在必要时才与伙伴通信、同时预测并优化自身运动,系统在杂乱空间中也能实现平滑、准确的搬运。这类分散式、实时的协作能力可能帮助未来的机器人完成诸如搬运库存、灾区援助或在工厂内重构布局等任务,减少人工干预并提高对故障的鲁棒性。
引用: Muhammed, I., Nada, A.A. & El-Hussieny, H. Real-time decentralized model predictive control for cooperative multi-robot object transport: experimental validation. Sci Rep 16, 9824 (2026). https://doi.org/10.1038/s41598-026-41881-w
关键词: 多机器人协作, 物体搬运, 模型预测控制, 分散式控制, 移动机器人