Clear Sky Science · sv
Decentraliserad modellprediktiv reglering i realtid för samarbetsbaserad flerrobot-transport: experimentell validering
Robotar som går ihop för att bära lasten
Föreställ dig ett lager där små mobila robotar, inte människor, går ihop för att bära lådor runt tajta hörn och mellan hyllor—utan att krocka med varandra eller närliggande hinder. Denna artikel visar hur två sådana robotar kan dela en tungt last och flytta den smidigt och säkert i realtid, även när deras sensorer är brusiga och deras uppfattning om omvärlden är ofullständig.
Varför det är svårt att dela lasten
Att få flera robotar att bära samma föremål är mycket svårare än att instruera en enda robot vart den ska gå. Maskinerna måste enas om var den delade lasten ska vara, hålla ett säkert avstånd från varandra och undvika att stöta i väggar eller hinder—samtidigt som de reagerar snabbt på förändringar. Traditionella tillvägagångssätt förlitar sig ofta på en enda central dator som ser allt och talar om för varje robot vad den ska göra. Den lösningen kan vara sårbar: om den centrala hjärnan eller kommunikationslänken fallerar kan hela laget kollapsa. Författarna undersöker i stället ett "decentraliserat" tillvägagångssätt där varje robot fattar egna beslut men ändå beter sig som en del av ett koordinerat team.
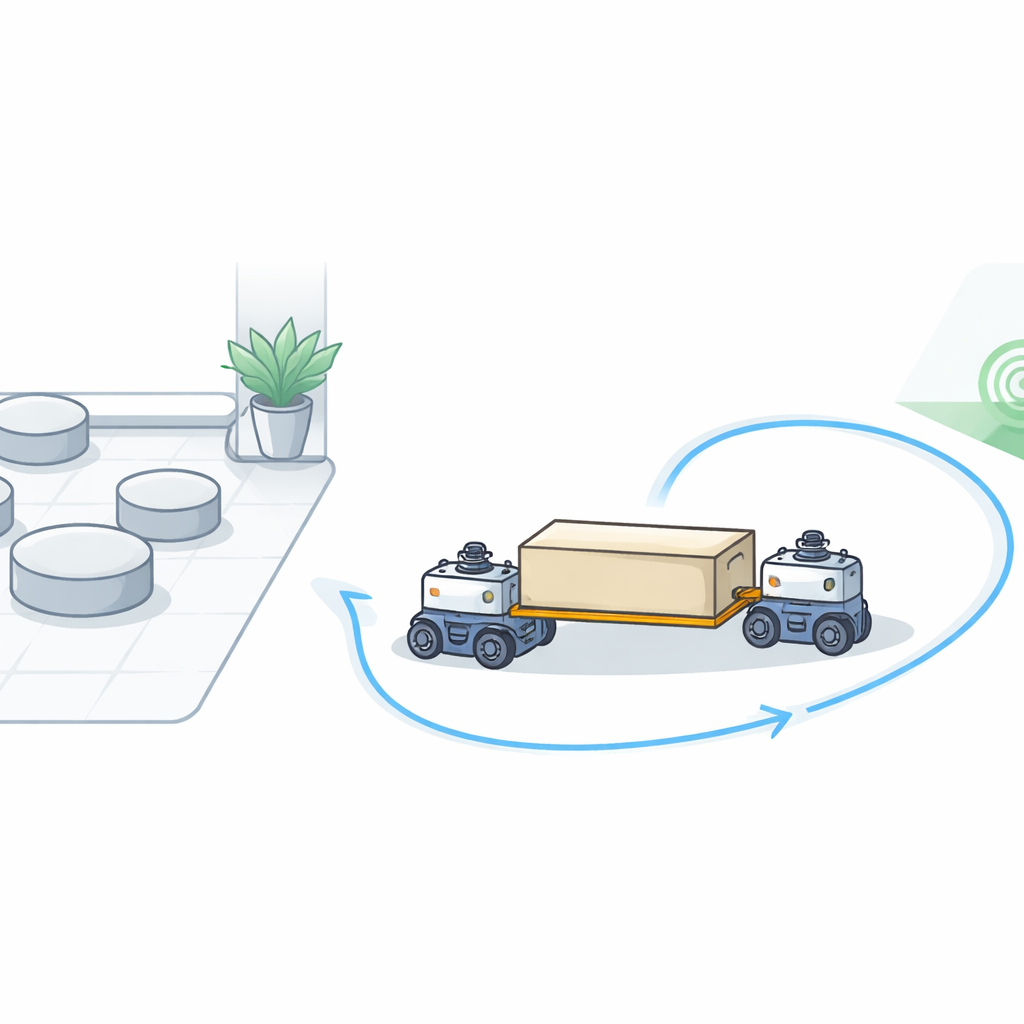
Ett par robotar i verkligheten
För att testa sina idéer byggde forskarna en fysisk uppställning med två små standardrobotar kända som TurtleBot3. Varje robot har två drivna hjul och bär en del av en lätt akrylplattform. De två robotarna är kopplade till den delade plattformen genom specialdesignade leder som både kan pivåra och tänjas, vilket efterliknar hur ett verkligt föremål kan flexa eller skifta när det bärs av ett team. Robotarna rör sig i ett måttligt inomhusutrymme ungefär i storlek med ett vardagsrum, markerat med visuella taggar som hjälper en övervakningskamera att bestämma var allt befinner sig.
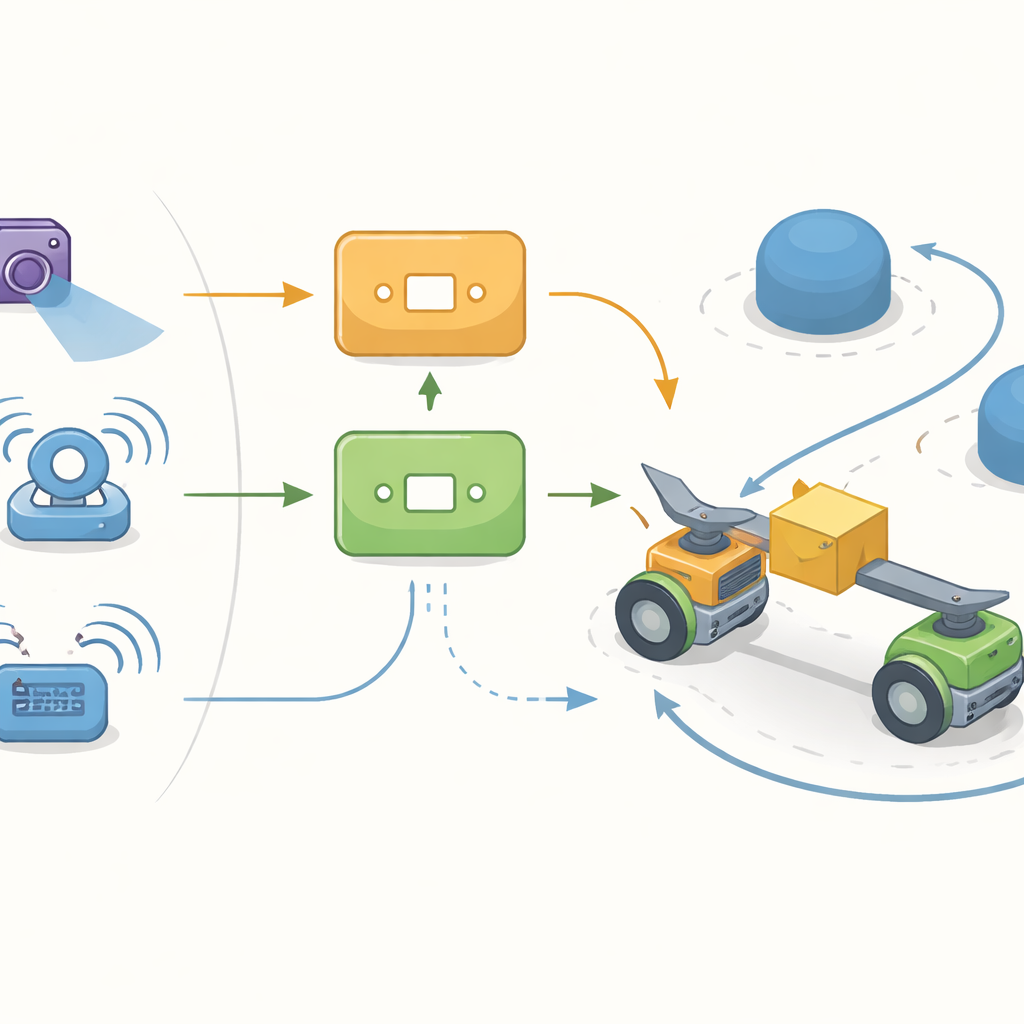
Se och fatta beslut i rörelse
Endast syn är inte perfekt: takkameran kan kortvarigt tappa sikten på en robot och dess mätningar är fördröjda. För att hålla reda på den delade lasten i realtid blandar systemet information från kameran med avläsningar från hjodencoderar och små rörelsesensorer på varje robot. En matematisk filtreringsmetod jämnar ut dessa signaler till en enhetlig, tillförlitlig uppskattning av var det burna objektet är och hur det rör sig. Ovanpå detta sensorskikt kör varje robot sin egen prediktiva regulator. I stället för att bara reagera på nuet tittar regulatorn en kort stund framåt och prövar möjliga rörelseval mot säkerhetsgränser som hastighetsbegränsningar, avstånd mellan robotarna och hur nära hinder de får komma.
Samarbete utan ständig kommunikation
Även om robotarna måste samarbeta så pratar de inte kontinuerligt. De delar information bara när deras relativa avstånd eller orientering avviker för mycket från vad som förväntas. Mellan dessa kommunikationsutbyten använder varje robot sin senaste bild av partnern och bygger in säkerhetsmarginaler för att undvika kollisioner. Regulatorn anpassar också sina prioriteringar i realtid: när den önskade banan svänger kraftigt eller hinder är nära fokuserar den automatiskt mer på att hålla sig nära den planerade rutten och bibehålla formationen, och något mindre på att göra rörelsen så mjuk som möjligt. När banan raknar av slappnar den av dessa prioriteringar för att minska belastningen på motorerna och hålla rörelsen jämn.
Att testa metoden
Teamet utsatte robotarna för en rad försök: förflyttningar mellan punkter, att spåra raka linjer och cirklar, samt att följa en åttondelsformad bana både med och utan hinder i vägen. I varje fall jämförde de en grundläggande version av regulatorn med den adaptiva som kan ställa om sina prioriteringar under körning. Den adaptiva strategin höll den burna plattformen mycket närmare den avsedda banan—förbättringar i noggrannhet på ungefär en femtedel till en tredjedel—samtidigt som alla säkerhetsgränser för avstånd, ledutsträckning och hur snabbt hjulen kan snurra eller ändra hastighet respekterades. Även på en enkel dator kunde varje robot slutföra sina beräkningar tillräckligt snabbt för att uppdatera sina rörelsebeslut tio gånger per sekund, vilket gav marginal för realtidsdrift.
Vad detta betyder för framtida robotlag
För icke-specialister är huvudbudskapet att det nu är möjligt för team av små, billiga robotar att bära delade laster säkert och precist utan att vara beroende av en enda central styrenhet. Genom att blanda kameradata och ombord-sensorer och låta varje robot förutsäga och optimera sin egen rörelse—samt kommunicera med sin partner bara vid behov—uppnår systemet jämn, exakt transport även i trånga miljöer. Denna typ av decentraliserat realtidssamarbete kan hjälpa framtida robotar att hantera uppgifter som att flytta lager, bistå i katastrofzoner eller omkonfigurera fabriksgolvet med mindre mänsklig tillsyn och större motståndskraft mot fel.
Citering: Muhammed, I., Nada, A.A. & El-Hussieny, H. Real-time decentralized model predictive control for cooperative multi-robot object transport: experimental validation. Sci Rep 16, 9824 (2026). https://doi.org/10.1038/s41598-026-41881-w
Nyckelord: samarbete mellan flera robotar, objekttransport, modellprediktiv styrning, decentraliserad styrning, mobila robotar