Clear Sky Science · ru
Децентрализованное модельно-предсказательное управление в реальном времени для совместной транспортировки объектов несколькими роботами: экспериментальная валидация
Роботы объединяются, чтобы нести груз
Представьте склад, где небольшие мобильные роботы — не люди — объединяются, чтобы переносить коробки через узкие повороты и между стеллажами, не сталкиваясь друг с другом и с окружающими препятствиями. В этой работе показано, как два таких робота могут совместно нести тяжёлый объект и перемещать его плавно и безопасно в реальном времени, даже если их датчики шумят и обзор мира неполный.
Почему совместная переноска — это сложно
Заставить несколько роботов нести один и тот же объект гораздо сложнее, чем указать путь одному роботу. Машины должны договориться о положении общего груза, держать безопасную дистанцию друг от друга и избегать ударов о стены и препятствия — при этом быстро реагируя на изменения. Традиционные подходы часто полагаются на единый центральный компьютер, который всё видит и указывает каждому роботу, что делать. Такая схема может быть хрупкой: при отказе центрального «мозга» или канала связи команда может перестать работать. Авторы исследуют вместо этого «децентрализованный» подход, при котором каждый робот принимает собственные решения, оставаясь частью скоординированной команды.
Реальная пара роботов
Чтобы проверить идеи на практике, исследователи собрали физическую установку на основе двух доступных коммерческих роботов TurtleBot3. Каждый робот оснащён двумя ведущими колёсами и несёт часть лёгкой акриловой платформы. Два робота соединены с общей платформой через специально разработанные шарниры, которые могут и поворачиваться, и растягиваться, имитируя, как реальный объект может прогибаться или смещаться при переноске командой. Роботы перемещаются в помещении размером примерно с гостиную, помеченном визуальными метками, которые помогают камере в потолке определять расположение всех объектов.
Видеть и принимать решения в движении
Только визуальные данные не идеальны: камера сверху может кратковременно терять из виду робот и измерения приходят с задержкой. Чтобы отслеживать общий груз в реальном времени, система объединяет информацию с камеры с показаниями одометрии и небольших инерционных датчиков на каждом роботе. Математический фильтр сглаживает эти сигналы в единый, надёжный оценочный вектор положения и движения переносимого объекта. Поверх слоя восприятия каждый робот запускает собственный предиктивный контроллер. Вместо того чтобы реагировать лишь на настоящий момент, контроллер заглядывает на короткое время вперёд и оценивает возможные варианты движения относительно ограничений безопасности: предельной скорости, дистанции между роботами и допустимого расстояния до препятствий.
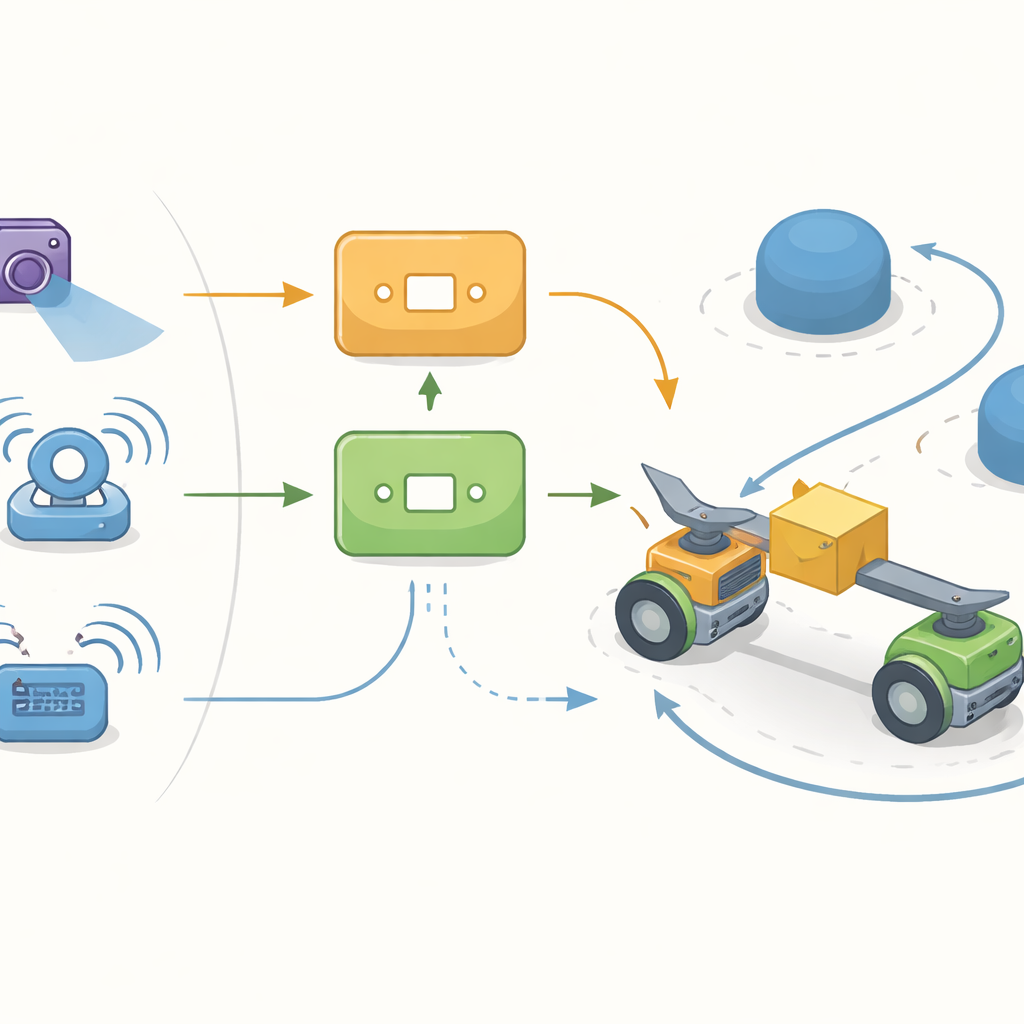
Сотрудничество без постоянного общения
Хотя роботы должны кооперироваться, они не обмениваются данными постоянно. Информацию посылают только тогда, когда взаимное расстояние или ориентация отклоняются слишком далеко от ожидаемого. Между такими всплесками связи каждый робот использует своё последнее наблюдение партнёра и заложенные запасные интервалы безопасности, чтобы избегать столкновений. Контроллер также динамически меняет приоритеты: когда путь сильно изгибается или рядом находятся препятствия, он автоматически уделяет больше внимания тому, чтобы держаться намеченного маршрута и сохранять плотность формации, и несколько меньше — сглаживанию движения. Когда путь выпрямляется, приоритеты ослабляются, чтобы снизить нагрузку на моторы и сделать движение более плавным.
Тестирование метода
Команда подвергла роботов ряду испытаний: перемещения между точками, движение по прямым и окружностям, а также следование по пути в форме бесконечности с препятствиями и без них. В каждом случае сравнивали базовую версию контроллера с адаптивной, которая умеет перенастраивать приоритеты в процессе работы. Адаптивная стратегия держала платформу гораздо ближе к заданной траектории — улучшая точность примерно на одну пятую до одной трети — при этом соблюдая все ограничения по дистанции, удлинению шарниров и предельным скоростям и ускорениям колёс. Даже на скромном компьютере каждый робот мог завершать расчёты достаточно быстро, чтобы обновлять решения о движении десять раз в секунду, оставляя запас для работы в реальном времени.
Что это значит для будущих команд роботов
Для неспециалистов главный вывод таков: теперь стало возможным, чтобы команды небольших недорогих роботов безопасно и точно переносили общие грузы без зависимости от единого центрального контроллера. Объединяя данные с камеры и бортовых датчиков и позволяя каждому роботу предсказывать и оптимизировать собственное движение при общении с партнёром только по необходимости, система обеспечивает плавную и точную транспортировку даже в загруженных пространствах. Такой децентрализованный, работающий в реальном времени кооператив может помочь роботам будущего выполнять задачи вроде перемещения запасов, оказания помощи в зонах бедствий или переконфигурации цехов с меньшим участием человека и большей устойчивостью к сбоям.
Цитирование: Muhammed, I., Nada, A.A. & El-Hussieny, H. Real-time decentralized model predictive control for cooperative multi-robot object transport: experimental validation. Sci Rep 16, 9824 (2026). https://doi.org/10.1038/s41598-026-41881-w
Ключевые слова: кооперация нескольких роботов, перенос объектов, модельно-предсказательное управление, децентрализованное управление, мобильные роботы