Clear Sky Science · pl
Decentralizowane sterowanie predykcyjne w czasie rzeczywistym do współpracy wielorobotowej przy transporcie obiektów: walidacja eksperymentalna
Roboty łączą siły, by nieść ciężar
Wyobraź sobie magazyn, w którym małe roboty mobilne, zamiast ludzi, łączą siły, by przenosić pudła po ostrych zakrętach i między regałami — bez kolizji między sobą czy z pobliskimi przeszkodami. W artykule pokazano, jak dwa takie roboty mogą współdzielić ciężki ładunek i poruszać go płynnie oraz bezpiecznie w czasie rzeczywistym, nawet gdy ich sensory są zaszumione, a obraz świata niepełny.
Dlaczego dzielenie ładunku jest trudne
Sprawienie, by wiele robotów niosło ten sam przedmiot, jest znacznie trudniejsze niż poprowadzenie jednego robota. Maszyny muszą uzgodnić pozycję wspólnego ładunku, zachować bezpieczny odstęp między sobą i unikać uderzeń w ściany czy przeszkody — wszystko to z szybką reakcją na zmiany. Tradycyjne podejścia często polegają na jednym centralnym komputerze, który widzi wszystko i rozdziela polecenia. Taka konfiguracja bywa krucha: awaria centralnego mózgu lub łącza komunikacyjnego może rozbić cały zespół. Autorzy badają zamiast tego podejście „zdecentralizowane”, w którym każdy robot podejmuje własne decyzje, a jednocześnie działa jako część skoordynowanej drużyny.
Para robotów w realistycznym otoczeniu
Aby przetestować pomysł, badacze zbudowali fizyczny układ z dwoma małymi, dostępny na rynku robotami znanymi jako TurtleBot3. Każdy robot ma dwa napędzane koła i niesie część lekkiej akrylowej platformy. Roboty łączą się z tą wspólną platformą za pomocą specjalnie zaprojektowanych przegubów, które mogą zarówno się obracać, jak i się rozciągać, naśladując, jak prawdziwy przedmiot może się zginać lub przesuwać podczas przenoszenia przez zespół. Roboty poruszają się w niewielkim pomieszczeniu o rozmiarach zbliżonych do salonu, oznaczonym znacznikami wizualnymi, które pomagają kamerze umieszczonej nad nimi określić położenie wszystkiego.
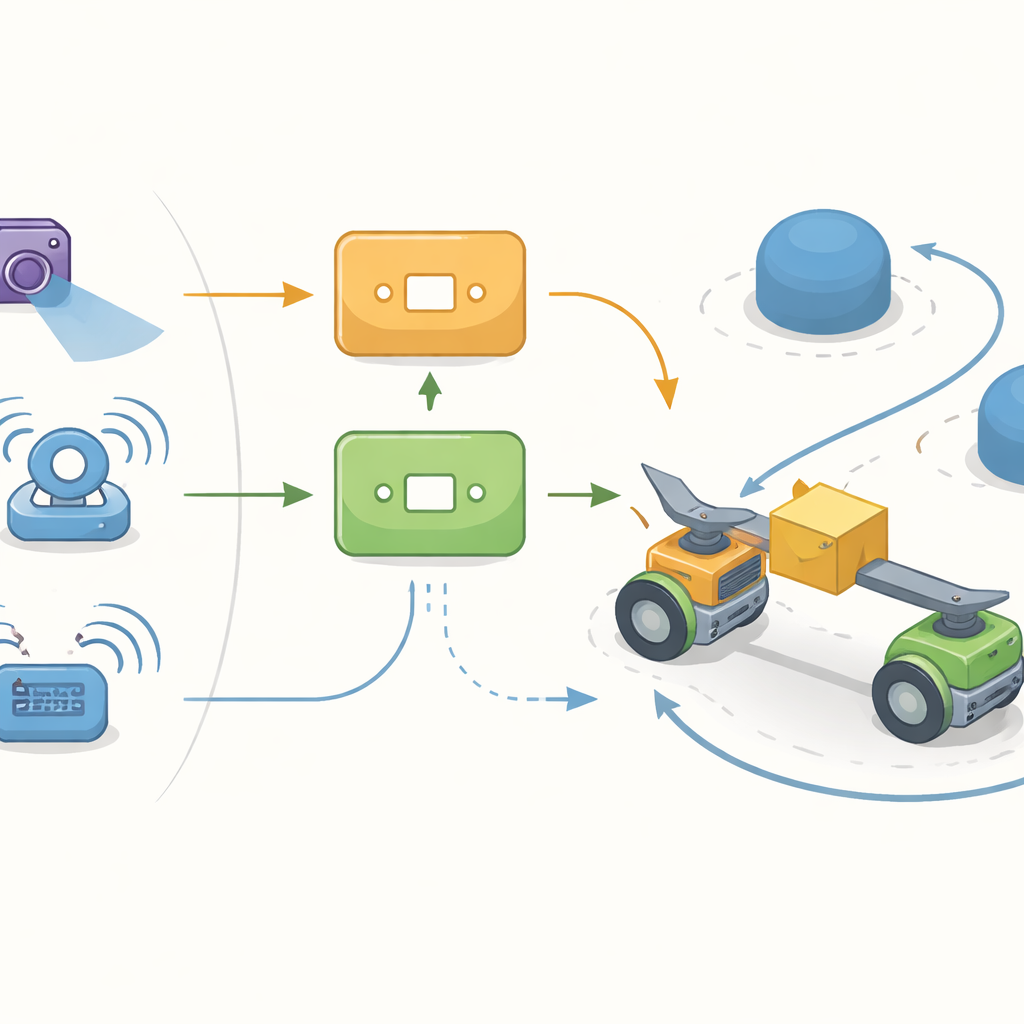
Postrzeganie i podejmowanie decyzji w ruchu
Samo widzenie nie jest idealne: kamera z góry może chwilowo stracić z oczu robota, a jej pomiary są opóźnione. Aby śledzić wspólny ładunek w czasie rzeczywistym, system łączy informacje z kamery z odczytami enkoderów kół i małych czujników ruchu na każdym robocie. Matematyczna metoda filtracji wygładza te sygnały do jednego, wiarygodnego oszacowania, gdzie znajduje się przenoszony obiekt i jak się porusza. Na tej warstwie sensorycznej każdy robot uruchamia własny regulator predykcyjny. Zamiast reagować wyłącznie na chwilę obecną, regulator patrzy krótko w przyszłość, sprawdzając możliwe ruchy pod kątem limitów bezpieczeństwa, takich jak ograniczenia prędkości, odstępy między robotami oraz dopuszczalna odległość od przeszkód.
Współpraca bez ciągłej rozmowy
Chociaż roboty muszą współpracować, nie komunikują się nieustannie. Wymieniają informacje tylko wtedy, gdy ich względne odległości lub orientacja odejdą zbyt daleko od oczekiwanego stanu. Pomiędzy tymi zrywami komunikacji każdy robot korzysta z ostatniego obrazu partnera i wprowadza marginesy bezpieczeństwa, by unikać kolizji. Regulator na bieżąco dostosowuje też własne priorytety: gdy żądana trajektoria mocno skręca lub przeszkody są blisko, automatycznie skupia się bardziej na trzymaniu planowanej ścieżki i utrzymaniu formacji, a nieco mniej na minimalizowaniu sił działających na ruch. Gdy ścieżka prostuje się, priorytety są rozluźniane, by zmniejszyć obciążenie silników i wygładzić ruch.
Testy metody
Zespół przeprowadził szereg prób: przemieszczanie się z punktu do punktu, śledzenie linii prostych i okręgów oraz podążanie po ścieżce w kształcie ósemki zarówno z przeszkodami, jak i bez nich. W każdym przypadku porównywano prostą wersję regulatora z adaptacyjną, która sama potrafi na bieżąco przetunować priorytety. Strategia adaptacyjna utrzymywała platformę znacznie bliżej zamierzonej ścieżki — poprawiając dokładność w przybliżeniu o jedną piątą do jednej trzeciej — przy jednoczesnym spełnieniu wszystkich limitów bezpieczeństwa dotyczących odstępów, wysięgu przegubów oraz maksymalnych prędkości i przyspieszeń kół. Nawet na skromnym komputerze każdy robot mógł wykonać obliczenia wystarczająco szybko, by aktualizować decyzje ruchu dziesięć razy na sekundę, zostawiając zapas potrzebny do działania w czasie rzeczywistym.
Co to oznacza dla przyszłych zespołów robotów
Dla osób niebędących specjalistami kluczowy wniosek jest taki, że teraz jest wykonalne, by zespoły małych, niedrogich robotów przenosiły wspólne ładunki bezpiecznie i precyzyjnie, nie polegając na jednym centralnym sterowniku. Dzięki połączeniu danych z kamery i czujników pokładowych oraz pozwoleniu, by każdy robot przewidywał i optymalizował własny ruch, komunikując się z partnerem tylko wtedy, gdy to konieczne, system osiąga płynny, dokładny transport nawet w zatłoczonych przestrzeniach. Tego rodzaju zdecentralizowana, działająca w czasie rzeczywistym współpraca może pomóc przyszłym robotom w zadaniach takich jak przenoszenie zasobów, wsparcie w strefach katastrof czy rekonfiguracja hal fabrycznych przy mniejszym nadzorze ludzi i większej odporności na awarie.
Cytowanie: Muhammed, I., Nada, A.A. & El-Hussieny, H. Real-time decentralized model predictive control for cooperative multi-robot object transport: experimental validation. Sci Rep 16, 9824 (2026). https://doi.org/10.1038/s41598-026-41881-w
Słowa kluczowe: współpraca wielorobotowa, transport obiektów, sterowanie predykcyjne modelowe, sterowanie zdecentralizowane, roboty mobilne