Clear Sky Science · de
Echtzeit-dezentrale modellprädiktive Regelung für kooperativen Mehrrobotergütertransport: experimentelle Validierung
Roboter arbeiten zusammen, um die Last zu tragen
Stellen Sie sich ein Lager vor, in dem kleine mobile Roboter anstelle von Menschen Kisten um enge Ecken und zwischen Regalen tragen — ohne zusammen oder gegen Hindernisse zu stoßen. Diese Arbeit zeigt, wie zwei solche Roboter ein schweres Objekt gemeinsam tragen und es in Echtzeit glatt und sicher bewegen können, selbst wenn ihre Sensoren verrauscht sind und ihre Sicht auf die Umgebung unvollständig ist.
Warum das Teilen der Last schwierig ist
Mehrere Roboter dazu zu bringen, dasselbe Objekt zu tragen, ist weit anspruchsvoller, als einem einzelnen Roboter seinen Weg vorzugeben. Die Maschinen müssen sich über die Lage der gemeinsamen Last einigen, einen sicheren Abstand zueinander einhalten und Kollisionen mit Wänden oder Hindernissen vermeiden — und das alles bei schneller Reaktionsfähigkeit auf Änderungen. Traditionelle Ansätze setzen häufig auf einen zentralen Rechner, der alles sieht und den einzelnen Robotern Befehle erteilt. Dieses Konzept kann fragil sein: Fällt das zentrale System oder die Kommunikationsverbindung aus, kann das ganze Team zusammenbrechen. Die Autoren untersuchen stattdessen einen „dezentralen“ Ansatz, bei dem jeder Roboter eigene Entscheidungen trifft, aber dennoch als Teil eines koordinierten Teams auftritt.
Ein reales Roboterpaar
Um ihre Konzepte zu testen, bauten die Forschenden eine physische Versuchsplattform mit zwei kleinen handelsüblichen Robotern namens TurtleBot3. Jeder Roboter hat zwei angetriebene Räder und trägt einen Teil einer leichten Acrylplattform. Die beiden Roboter sind über speziell gestaltete Gelenke mit dieser gemeinsamen Plattform verbunden, die sowohl schwenken als auch nachgeben können, sodass sie das Nachgeben oder Verschieben eines realen Objekts beim Tragen nachahmen. Die Roboter bewegen sich in einem moderaten Innenraum in etwa Wohnzimmergröße, der mit visuellen Markierungen versehen ist, die einer Überkopf‑Kamera helfen, die Positionen zu bestimmen.
Sehen und Entscheiden in Bewegung
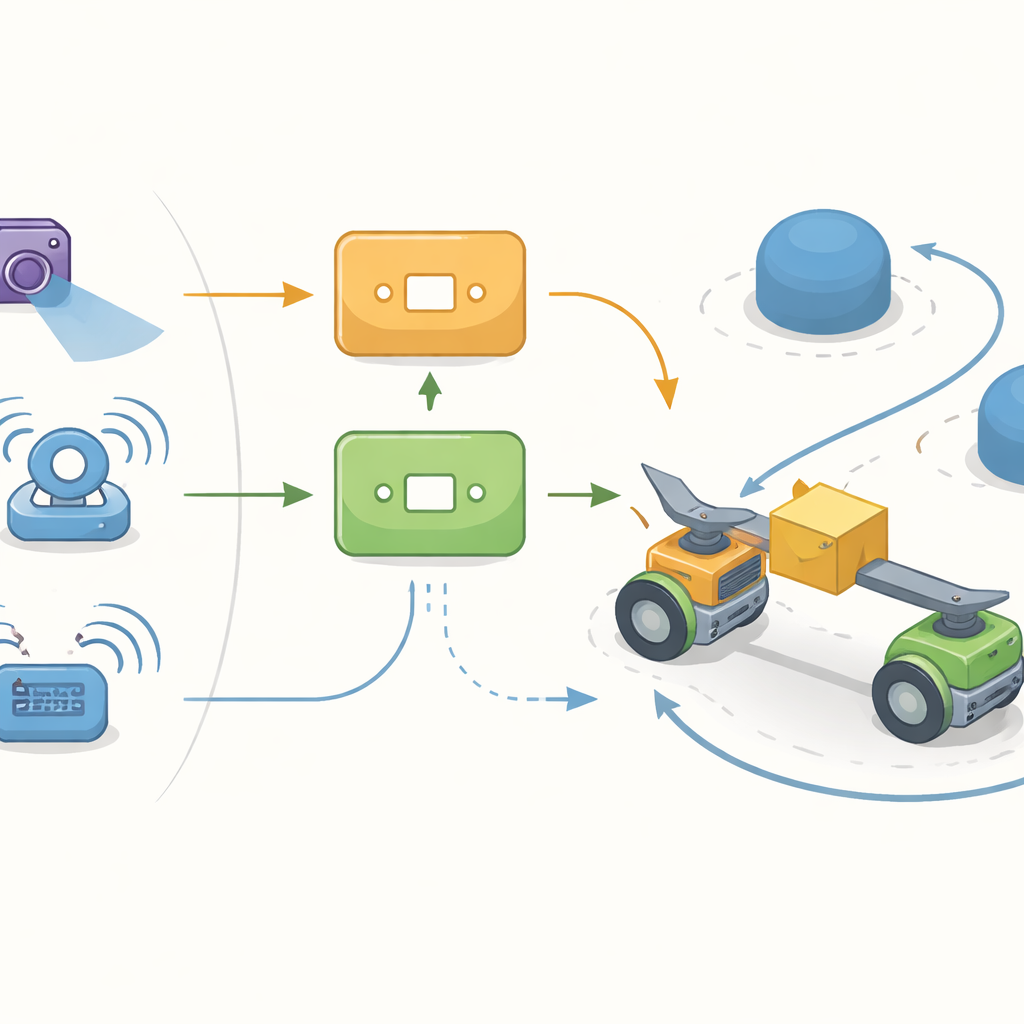
Allein die Bildgebung ist nicht perfekt: Die Überkopf‑Kamera kann kurzzeitig einen Roboter verlieren, und ihre Messungen sind verzögert. Um die gemeinsame Last in Echtzeit zu verfolgen, verbindet das System die Kamerainformationen mit Messwerten von Raddrehgebern und kleinen Bewegungssensoren an jedem Roboter. Ein mathematisches Filterverfahren glättet diese Signale zu einer verlässlichen Schätzung, wo sich das getragene Objekt befindet und wie es sich bewegt. Auf dieser Sensorebene läuft bei jedem Roboter ein eigener prädiktiver Regler. Statt nur auf den gegenwärtigen Moment zu reagieren, blickt der Regler kurz in die Zukunft und prüft mögliche Bewegungsoptionen gegen Sicherheitsgrenzen wie Geschwindigkeitsbegrenzungen, Abstände zwischen den Robotern und erlaubte Nähe zu Hindernissen.
Kooperation ohne ständige Kommunikation
Obwohl die Roboter kooperieren müssen, führen sie keinen dauernden Informationsaustausch. Sie teilen Informationen nur, wenn ihr relativer Abstand oder ihre Orientierung zu weit vom Erwarteten abweicht. Zwischen diesen Kommunikationsausbrüchen nutzt jeder Roboter die letzte Sicht auf seinen Partner und baut Sicherheitsmargen ein, um Kollisionen zu vermeiden. Der Regler passt außerdem seine Prioritäten situativ an: Wenn der gewünschte Pfad scharf abbiegt oder Hindernisse in der Nähe sind, konzentriert er sich automatisch stärker darauf, der geplanten Route zu folgen und die Formation eng zu halten, und weniger darauf, die Bewegung so sanft wie möglich zu gestalten. Wenn der Pfad wieder gerader wird, lockert er diese Prioritäten, um die Motorbelastung zu verringern und die Bewegung zu glätten.
Die Methode im Praxistest
Das Team führte eine Reihe von Versuchen durch: Fahrten von einem Punkt zum anderen, das Abfahren gerader Linien und Kreise sowie das Folgen einer Acht‑förmigen Bahn, sowohl mit als auch ohne Hindernisse. In jedem Fall verglichen sie eine einfache Version des Reglers mit der adaptiven Variante, die ihre Prioritäten während der Fahrt selbst nachstellen kann. Die adaptive Strategie hielt die getragene Plattform deutlich dichter an der gewünschten Bahn — mit einer Genauigkeitsverbesserung von ungefähr einem Fünftel bis einem Drittel — und hielt dabei weiterhin alle Sicherheitsgrenzen für Abstände, Gelenkauslenkung und wie schnell die Räder drehen oder ihre Geschwindigkeit ändern dürfen ein. Selbst auf einem moderaten Rechner konnten die Roboter ihre Berechnungen schnell genug ausführen, um zehnmal pro Sekunde ihre Bewegungsentscheidungen zu aktualisieren, was für den Echtzeitbetrieb ausreichend Spielraum ließ.
Was das für zukünftige Roboterteams bedeutet
Für Nicht‑Fachleute ist die Kernbotschaft: Es ist nun machbar, dass Teams kleiner, kostengünstiger Roboter gemeinsame Lasten sicher und präzise transportieren, ohne von einem einzelnen zentralen Regler abhängig zu sein. Durch die Kombination von Kamera‑ und Onboard‑Sensordaten und indem jeder Roboter seine Bewegung vorhersagt und optimiert und nur bei Bedarf mit dem Partner kommuniziert, erreicht das System glatten, genauen Transport selbst in beengten Umgebungen. Diese Art von dezentraler, echzeitfähiger Teamarbeit könnte zukünftigen Robotern helfen, Aufgaben wie das Bewegen von Lagerbeständen, Unterstützung in Katastrophengebieten oder das Umgestalten von Fabrikhallen mit weniger menschlicher Überwachung und größerer Ausfallsicherheit zu übernehmen.
Zitation: Muhammed, I., Nada, A.A. & El-Hussieny, H. Real-time decentralized model predictive control for cooperative multi-robot object transport: experimental validation. Sci Rep 16, 9824 (2026). https://doi.org/10.1038/s41598-026-41881-w
Schlüsselwörter: Mehrroboterkoperation, Gütertransport, modellprädiktive Regelung, dezentrale Regelung, mobile Roboter