Clear Sky Science · es
Control predictivo de modelos descentralizado en tiempo real para transporte cooperativo de objetos por múltiples robots: validación experimental
Robots que se unen para cargar la carga
Imagine un almacén donde pequeños robots móviles, no personas, se unen para llevar cajas por esquinas estrechas y entre estanterías—sin chocar entre sí ni con los obstáculos cercanos. Este artículo muestra cómo dos de esos robots pueden compartir un objeto pesado y moverlo de forma suave y segura en tiempo real, incluso cuando sus sensores son ruidosos y su visión del entorno es imperfecta.
Por qué repartir la carga es difícil
Lograr que varios robots lleven el mismo objeto es mucho más complicado que decirle a un solo robot adónde ir. Las máquinas deben ponerse de acuerdo sobre dónde debe estar la carga compartida, mantener una distancia segura entre sí y evitar chocar contra paredes u obstáculos, todo mientras reaccionan con rapidez a los cambios. Los enfoques tradicionales suelen confiar en un único ordenador central que lo ve todo y dicta a cada robot qué hacer. Esa configuración puede ser frágil: si el cerebro central o el enlace de comunicación falla, todo el equipo puede colapsar. Los autores exploran en cambio un enfoque «descentralizado» en el que cada robot toma sus propias decisiones pero aún así actúa como parte de un equipo coordinado.
Una pareja de robots en el mundo real
Para probar sus ideas, los investigadores montaron un sistema físico usando dos pequeños robots comerciales conocidos como TurtleBot3. Cada robot tiene dos ruedas motrices y sostiene una porción de una plataforma ligera de metacrilato. Los dos robots están conectados a esta plataforma compartida mediante unas articulaciones diseñadas para poder pivotar y estirarse, imitando cómo un objeto real podría flexionarse o desplazarse cuando lo transporta un equipo. Los robots se mueven en una zona interior modesta del tamaño de una sala de estar, marcada con etiquetas visuales que ayudan a una cámara aérea a determinar dónde está todo.
Ver y decidir en movimiento
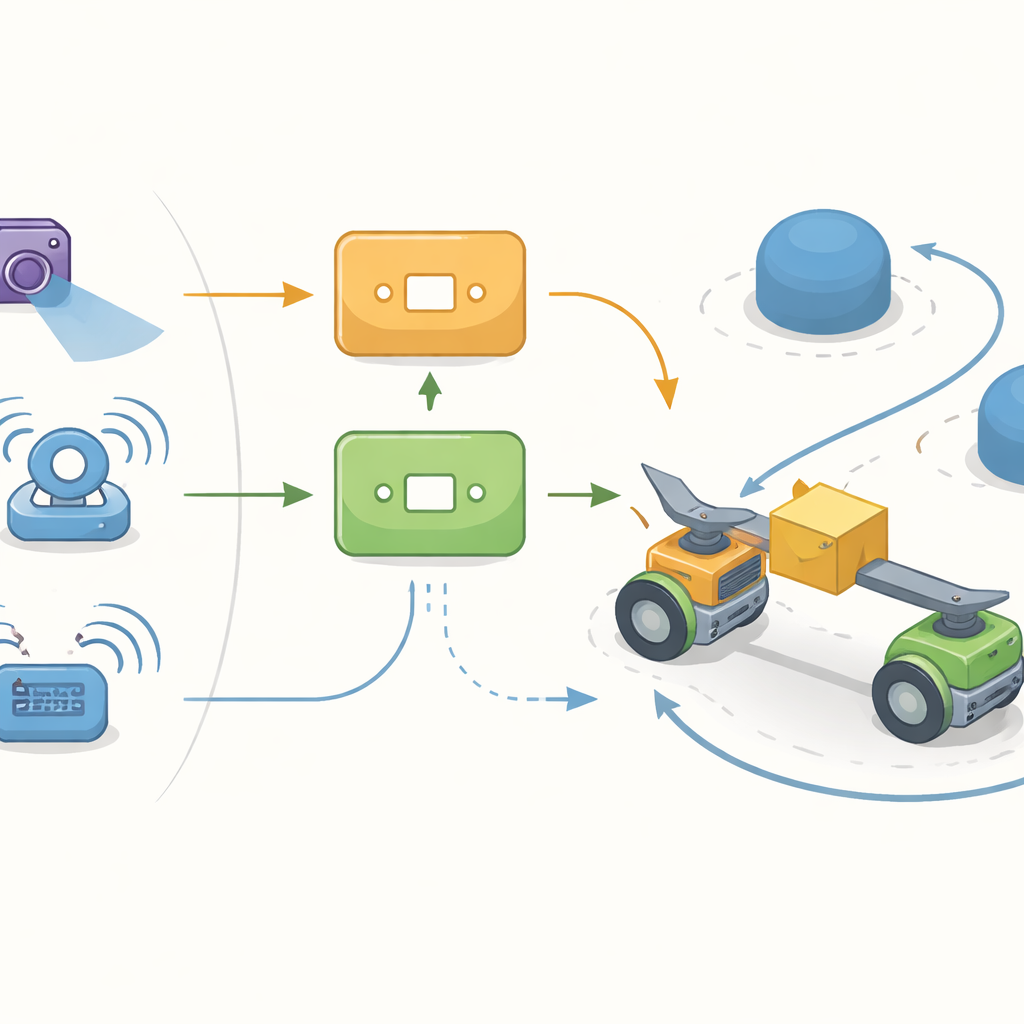
La visión por sí sola no es perfecta: la cámara aérea puede perder de vista a un robot brevemente y sus medidas están retrasadas. Para seguir la pista de la carga compartida en tiempo real, el sistema combina la información de la cámara con lecturas de los codificadores de las ruedas y pequeños sensores de movimiento en cada robot. Un método matemático de filtrado suaviza estas señales en una única estimación fiable de dónde está el objeto transportado y cómo se mueve. Sobre esta capa de percepción, cada robot ejecuta su propio controlador predictivo. En lugar de reaccionar sólo al momento presente, el controlador mira un breve intervalo hacia el futuro, comprobando las posibles opciones de movimiento frente a límites de seguridad como topes de velocidad, separación entre robots y la proximidad permitida a los obstáculos.
Cooperación sin una conversación continua
Aunque los robots deben cooperar, no conversan de forma continua. Comparten información sólo cuando su separación relativa u orientación se desvía demasiado de lo esperado. Entre esos picos de comunicación, cada robot utiliza su última visión del compañero e incorpora márgenes de seguridad para evitar colisiones. El controlador también ajusta sus prioridades sobre la marcha: cuando la trayectoria deseada gira bruscamente o hay obstáculos cerca, automáticamente da más peso a mantenerse cerca de la ruta prevista y a mantener la formación, y algo menos a que el movimiento sea lo más suave posible. Cuando la trayectoria se endereza, relaja esas prioridades para reducir el esfuerzo de los motores y conservar la suavidad del movimiento.
Poniendo el método a prueba
El equipo sometió a los robots a una serie de ensayos: moverse de un punto a otro, trazar líneas rectas y círculos, y seguir una trayectoria en forma de ocho tanto con obstáculos como sin ellos. En cada caso, compararon una versión básica del controlador con la versión adaptativa que puede retocar sus propias prioridades sobre la marcha. La estrategia adaptativa mantuvo la plataforma transportada mucho más cerca de la trayectoria prevista—mejorando la precisión en aproximadamente una quinta a un tercio—mientras seguía cumpliendo todos los límites de seguridad sobre separación, extensión de las articulaciones y cuán rápido podían girar o cambiar de velocidad las ruedas. Incluso en un ordenador modesto, cada robot pudo completar sus cálculos con suficiente rapidez como para actualizar sus decisiones de movimiento diez veces por segundo, dejando margen para la operación en tiempo real.
Qué significa esto para futuros equipos de robots
Para el público general, la conclusión es que ahora es factible que equipos de robots pequeños y económicos transporten cargas compartidas de forma segura y precisa sin depender de un único controlador central. Al combinar datos de la cámara y sensores a bordo y permitir que cada robot prediga y optimice su propio movimiento mientras conversa con su compañero sólo cuando es necesario, el sistema logra un transporte suave y exacto incluso en espacios con obstáculos. Este tipo de trabajo en equipo descentralizado y en tiempo real podría ayudar a que futuros robots realicen tareas como mover inventario, asistir en zonas de desastre o reconfigurar plantas de producción con menos supervisión humana y mayor resiliencia ante fallos.
Cita: Muhammed, I., Nada, A.A. & El-Hussieny, H. Real-time decentralized model predictive control for cooperative multi-robot object transport: experimental validation. Sci Rep 16, 9824 (2026). https://doi.org/10.1038/s41598-026-41881-w
Palabras clave: cooperación multi-robot, transporte de objetos, control predictivo de modelo, control descentralizado, robots móviles