Clear Sky Science · tr
Kooperatif Çoklu Robot Nesne Taşıma için Gerçek Zamanlı Dağıtık Model Öngörücü Kontrol: Deneysel Doğrulama
Yükü Taşımak İçin Birleşen Robotlar
Küçük mobil robotların, insanların değil, sık köşelerden ve raf aralarından kutuları çarpışmadan taşımak için bir araya geldiği bir depo hayal edin. Bu makale, iki robotun gürültülü sensörlere ve kusurlu algıya rağmen ağır bir nesneyi gerçek zamanlı olarak paylaşarak nasıl düzgün ve güvenli bir şekilde hareket ettirebileceğini gösteriyor.
Yükü Paylaşmak Neden Zordur
Birden çok robotun aynı nesneyi birlikte taşımasını sağlamak, tek bir robota nereye gitmesi gerektiğini söylemekten çok daha zordur. Makinelerin paylaşılan yükün nerede olması gerektiği konusunda anlaşması, birbirlerinden güvenli mesafeyi koruması ve duvarlar veya engellerle çarpışmamaları gerekir; üstelik değişimlere hızlıca tepki vermelidirler. Geleneksel yaklaşımlar genellikle her şeyi gören ve her robota ne yapacağını söyleyen tek bir merkezi bilgisayara dayanır. Bu yapı kırılgan olabilir: merkezi beyin veya haberleşme bağlantısı başarısız olursa, tüm takım aksayabilir. Yazarlar bunun yerine her robotun kendi kararlarını verdiği ama yine de koordine olmuş bir takım gibi davrandığı bir "dağıtık" yaklaşımı inceliyorlar.
Gerçek Dünyadan Bir Robot Çifti
Fikirlerini test etmek için araştırmacılar, TurtleBot3 olarak bilinen iki küçük marketten temin edilebilen robotu kullanarak fiziksel bir düzenek kurdular. Her robot iki tahrikli tekerleğe sahip ve hafif akrilik bir platformun bir bölümünü taşıyor. İki robot, paylaşılan bu platforma hem dönme hem de uzama yapabilen özel tasarımlı mafsallarla bağlı; bu, gerçek bir nesnenin ekip tarafından taşınırken nasıl esneyebileceğini veya kayabileceğini taklit ediyor. Robotlar, her şeyin konumunu belirlemeye yardımcı olan görsel etiketlerle işaretlenmiş, oturma odası büyüklüğünde mütevazı bir iç mekânda hareket ediyor.
Hareket Halinde Görme ve Karar Verme
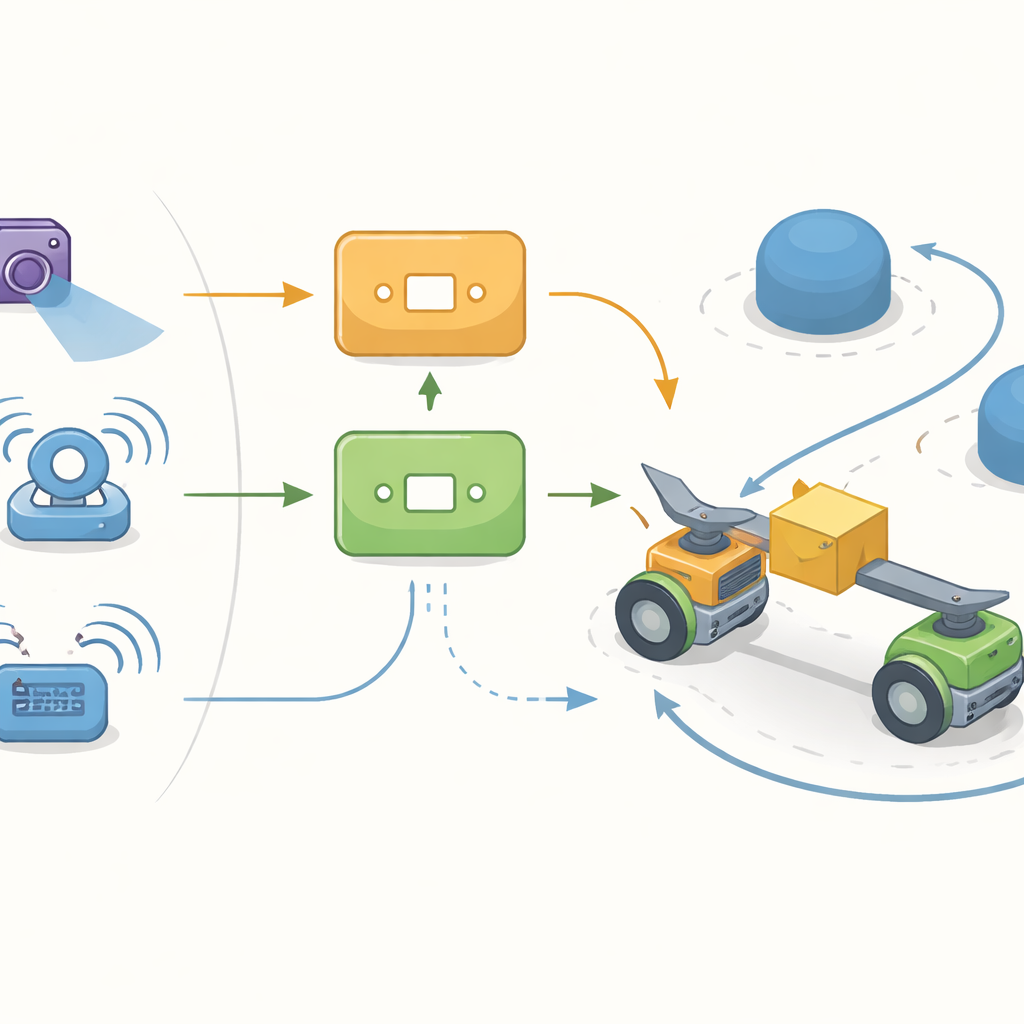
Sadece görme kusursuz değildir: tepeden bakan kamera kısa süreliğine bir robotu kaybedebilir ve ölçümler gecikebilir. Paylaşılan yükü gerçek zamanlı izlemek için sistem, kameradan alınan bilgileri tekerlek enkoderleri ve her robottaki küçük hareket sensörlerinin okumalarıyla harmanlıyor. Matematiksel bir filtreleme yöntemi bu sinyalleri, taşınan nesnenin nerede olduğu ve nasıl hareket ettiği hakkında tek, güvenilir bir tahmine yumuşatıyor. Bu algılama katmanının üstünde, her robot kendi öngörücü kontrolörünü çalıştırıyor. Kontrolör sadece mevcut ana tepki vermek yerine kısa bir süre ileriye bakıyor ve olası hareket seçeneklerini hız sınırları, robotlar arası mesafe ve engellere yaklaşma izinleri gibi güvenlik sınırlarına karşı sınayarak değerlendiriyor.
Sürekli Konuşma Olmadan İş Birliği
Robotların iş birliği yapması gerekmesine rağmen sürekli sohbet etmeleri zorunlu değil. İletişimi yalnızca göreli konumları veya yönelimleri beklenenden çok uzaklaştığında paylaşıyorlar. Bu iletişim patlamaları arasındaki sürede her robot, ortağının son görüntüsünü kullanıyor ve çarpışmalardan kaçınmak için güvenlik payları uyguluyor. Kontrolör ayrıca önceliklerini anlık olarak ayarlıyor: istenen yol keskin bir dönüş yapınca veya engeller yakın olduğunda rota takibine ve formasyonu sıkı tutmaya daha fazla odaklanıyor; hareketi mümkün olduğunca nazik yapmak gibi diğer hedeflere biraz daha az önem veriyor. Yol düzleştiğinde ise bu öncelikleri gevşetip motorlardaki yükü azaltmak ve hareketi pürüzsüz tutmak için ayarlıyor.
Yöntemin Sınanması
Takım robotları çeşitli deneylerden geçirdi: bir noktadan diğerine hareket, düz çizgiler ve daireler izleme ve engeller varken ve yokken sonsuzluk şeklinde bir yol takip etme. Her durumda, temel bir kontrolör sürümü ile kendi önceliklerini dinamik olarak yeniden ayarlayabilen uyarlanabilir sürüm karşılaştırıldı. Uyarlanabilir strateji, taşınan platformu hedeflenen yola çok daha yakın tuttu—doğruluğu yaklaşık beşte bir ila üçte bir oranında iyileştirirken—aynı zamanda mesafe, mafsal uzaması ve tekerleklerin dönebilme veya hız değiştirme sınırları gibi tüm güvenlik kısıtlarına uydu. Mütevazı bir bilgisayarda bile her robot hesaplamalarını saniyede on kez güncelleyecek kadar hızlı tamamlayabiliyor; bu gerçek zamanlı işletim için yeterli boşluk bırakıyor.
Gelecekteki Robot Takımları İçin Anlamı
Uzman olmayanlar için çıkarılacak ders, küçük, ucuz robot takımlarının tek bir merkezi kontrolöre bağımlı olmadan paylaşılan yükleri güvenli ve hassas şekilde taşımasının artık mümkün olduğudur. Kamera ve yerleşik sensör verilerini harmanlayıp her robotun kendi hareketini öngörüp optimize etmesine izin verirken yalnızca gerektiğinde haberleşmeye dayanan bu sistem, dağınık alanlarda bile pürüzsüz ve kesin taşımayı sağlıyor. Bu tür dağıtık, gerçek zamanlı iş birliği, gelecekte robotların envanter taşıma, afet bölgelerinde yardım etme veya fabrika düzenlerini insan gözetimini azaltarak ve arızalara karşı daha dayanıklı biçimde yeniden yapılandırma gibi görevleri üstlenmesine yardımcı olabilir.
Atıf: Muhammed, I., Nada, A.A. & El-Hussieny, H. Real-time decentralized model predictive control for cooperative multi-robot object transport: experimental validation. Sci Rep 16, 9824 (2026). https://doi.org/10.1038/s41598-026-41881-w
Anahtar kelimeler: çoklu robot işbirliği, nesne taşınması, model öngörücü kontrol, dağıtık kontrol, mobil robotlar