Clear Sky Science · pt
Controle preditivo de modelo descentralizado em tempo real para transporte cooperativo de objetos por múltiplos robôs: validação experimental
Robôs se unindo para carregar a carga
Imagine um depósito onde pequenos robôs móveis, em vez de pessoas, se unem para transportar caixas por cantos apertados e entre prateleiras—sem bater uns nos outros ou em obstáculos próximos. Este artigo mostra como dois desses robôs podem compartilhar um objeto pesado e movê-lo de forma suave e segura em tempo real, mesmo quando seus sensores são ruidosos e sua visão do ambiente é imperfeita.
Por que dividir a carga é difícil
Fazer múltiplos robôs carregarem o mesmo objeto é muito mais desafiador do que dizer a um único robô para onde ir. As máquinas precisam concordar sobre onde colocar a carga compartilhada, manter uma distância segura entre si e evitar bater em paredes ou obstáculos, tudo isso reagindo rapidamente a mudanças. Abordagens tradicionais frequentemente dependem de um único computador central que vê tudo e diz a cada robô o que fazer. Essa arquitetura pode ser frágil: se o cérebro central ou o link de comunicação falhar, toda a equipe pode colapsar. Os autores exploram em vez disso uma abordagem “descentralizada” na qual cada robô toma suas próprias decisões, mas ainda se comporta como parte de um time coordenado.
Um par de robôs no mundo real
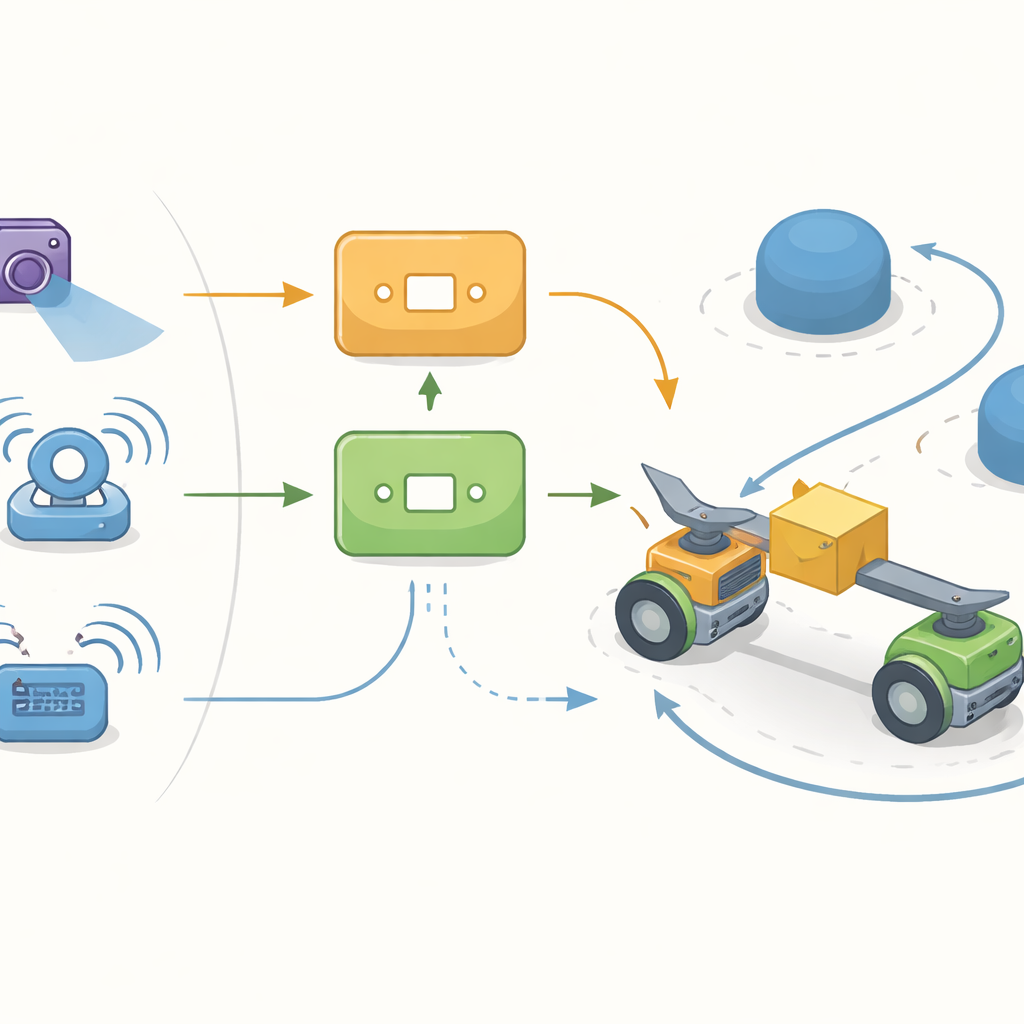
Para testar as ideias, os pesquisadores construíram um arranjo físico usando dois pequenos robôs comerciais conhecidos como TurtleBot3. Cada robô tem duas rodas motrizes e carrega uma porção de uma plataforma de acrílico leve. Os dois robôs estão conectados a essa plataforma compartilhada por juntas especialmente desenhadas que podem tanto pivotar quanto alongar, imitando como um objeto real pode flexionar ou deslocar-se quando carregado por uma equipe. Os robôs se movem em uma área interna modesta do tamanho de uma sala de estar, marcada com etiquetas visuais que ajudam uma câmera aérea a determinar onde tudo está.
Ver e decidir em movimento
Só a visão não é perfeita: a câmera aérea pode perder um robô por instantes, e suas medições têm atraso. Para acompanhar a carga compartilhada em tempo real, o sistema combina informações da câmera com leituras de encoders das rodas e pequenos sensores de movimento em cada robô. Um método matemático de filtragem suaviza esses sinais em uma única estimativa confiável de onde o objeto transportado está e como ele se move. Sobre essa camada de sensoriamento, cada robô executa seu próprio controlador preditivo. Em vez de reagir apenas ao momento presente, o controlador olha um curto período no futuro, avaliando escolhas de movimento possíveis em relação a limites de segurança como velocidades máximas, espaçamento entre robôs e quão perto eles podem chegar de obstáculos.
Cooperação sem conversa constante
Embora os robôs precisem cooperar, eles não se comunicam continuamente. Compartilham informações apenas quando seu espaçamento relativo ou orientação se desviam demais do esperado. Entre esses surtos de comunicação, cada robô usa sua última visão do parceiro e incorpora margens de segurança para evitar colisões. O controlador também ajusta suas próprias prioridades em tempo real: quando a trajetória desejada faz curvas acentuadas ou há obstáculos próximos, ele automaticamente foca mais em manter-se próximo à rota planejada e em manter a formação coesa, e um pouco menos em tornar o movimento o mais suave possível. Quando a trajetória se endireita, essas prioridades são relaxadas para reduzir o esforço nos motores e manter o movimento suave.
Colocando o método à prova
A equipe submeteu os robôs a uma série de testes: movendo-os de um ponto a outro, traçando linhas retas e círculos, e seguindo um caminho em forma de infinito tanto com quanto sem obstáculos no trajeto. Em cada caso, compararam uma versão básica do controlador com a versão adaptativa que pode retunar suas próprias prioridades durante a execução. A estratégia adaptativa manteve a plataforma transportada muito mais próxima da trajetória prevista—melhorando a precisão em cerca de um quinto a um terço—enquanto ainda respeitava todos os limites de segurança sobre espaçamento, extensão das juntas e quão rápido as rodas podiam girar ou variar a velocidade. Mesmo em um computador modesto, cada robô conseguiu completar seus cálculos rápido o suficiente para atualizar suas decisões de movimento dez vezes por segundo, deixando folga suficiente para operação em tempo real.
O que isso significa para equipes de robôs futuras
Para não especialistas, a mensagem principal é que agora é viável que equipes de robôs pequenos e baratos carreguem cargas compartilhadas de forma segura e precisa sem depender de um único controlador central. Ao combinar dados de câmera e sensores embarcados e permitindo que cada robô preveja e otimize seu próprio movimento enquanto se comunica com o parceiro apenas quando necessário, o sistema alcança transporte suave e preciso mesmo em espaços congestionados. Esse tipo de trabalho em equipe descentralizado e em tempo real pode ajudar robôs futuros a realizar tarefas como movimentar inventário, auxiliar em zonas de desastre ou reconfigurar pisos de fábricas com menos supervisão humana e maior resiliência a falhas.
Citação: Muhammed, I., Nada, A.A. & El-Hussieny, H. Real-time decentralized model predictive control for cooperative multi-robot object transport: experimental validation. Sci Rep 16, 9824 (2026). https://doi.org/10.1038/s41598-026-41881-w
Palavras-chave: cooperação multi-robô, transporte de objetos, controle preditivo de modelo, controle descentralizado, robôs móveis