Clear Sky Science · he
בקרת מודל חזויה מבוזרת בזמן אמת לשינוע משותף של עצמים על‑ידי ריבוי רובוטים: אימות ניסיוני
רובוטים שמשתפים פעולה כדי לשאת את המטען
דמיינו מחסן שבו רובוטים ניידים קטנים, ולא בני אדם, משתפים פעולה כדי לשאת ארגזים סביב פינות צרות ובין מדפים—מבלי להתנגש זה בזה או במכשולים סמוכים. המאמר הזה מראה כיצד שני רובוטים כאלה יכולים לחלוק עצם כבד ולהזיז אותו בתנועה חלקה ובטוחה בזמן אמת, אפילו כאשר החישה שלהם רועשת וההתמצאות בסביבה אינה מושלמת.
מדוע שיתוף המטען קשה
להנחות מספר רובוטים לשאת את אותו עצם קשה הרבה יותר מלהורות לרובוט יחיד לאן ללכת. המכונות חייבות להסכים על מיקום המטען המשותף, לשמור על מרחק בטוח זו מזו, ולהימנע מהתנגשויות בקירות או במכשולים, וכל זאת תוך תגובה מהירה לשינויים. גישות מסורתיות מבוססות לעיתים על מחשב מרכזי יחיד שרואה את הכול ומורה לכל רובוט מה לעשות. תצורה כזו עלולה להיות פגיעה: אם המוח המרכזי או קישור התקשורת נכשלים, הצוות כולו עלול להישבר. המחברים בוחנים במקום זאת גישה "מבוזרת" שבה כל רובוט מקבל החלטות בעצמו אך עדיין מתנהג כחלק מצוות מתואם.
זוג רובוטים במציאות
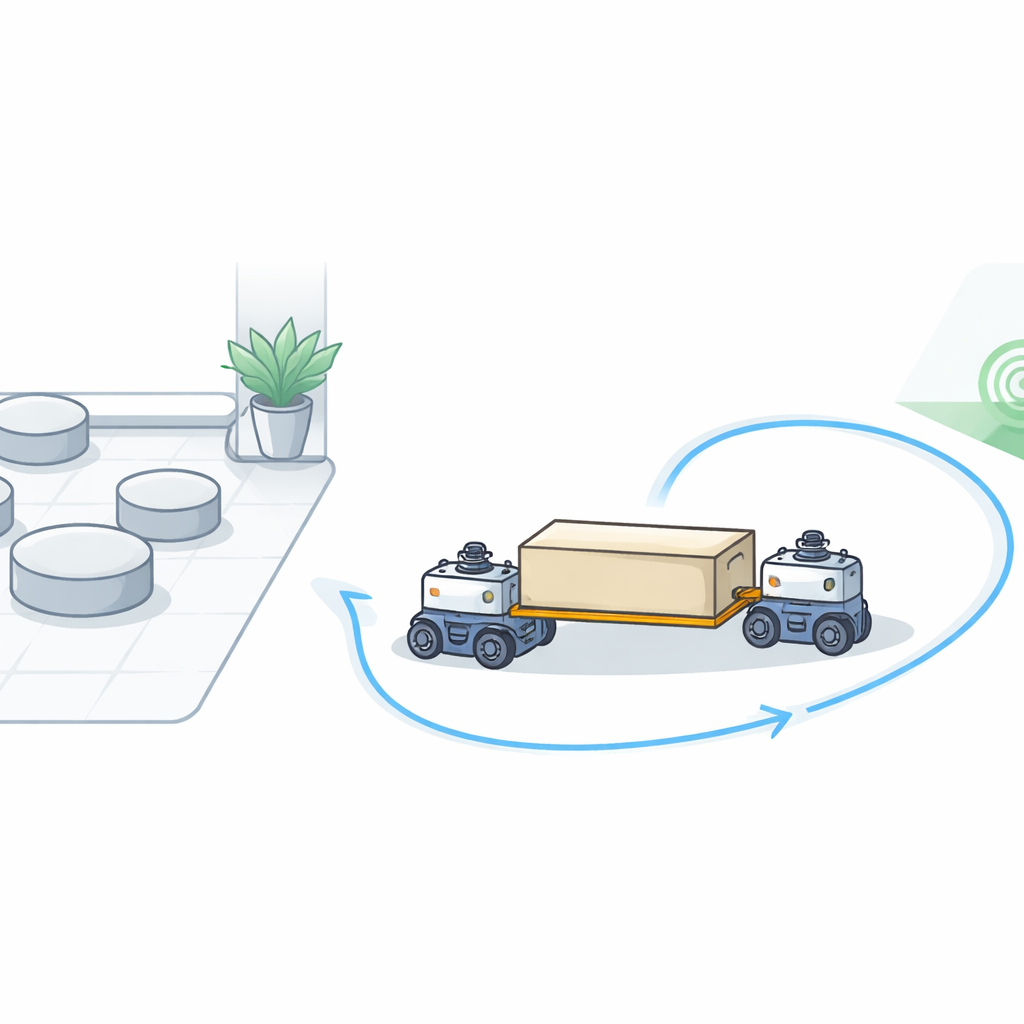
כדי לבחון את הרעיונות שלהם, החוקרים בנו מערכת פיזית המשתמשת בשני רובוטים קטנים זמינים מסחרית המכונים TurtleBot3. לכל רובוט שתי גלגלות מונעות והוא נושא חלק מפלטפורמה אקרילית קלה. שני הרובוטים מחוברים לפלטפורמה המשותפת באמצעות מפרקים מעוצבים שיכולים גם לסובב וגם להימתח, המדמים כיצד עצם אמיתי עשוי להתכופף או להשתנות כאשר נישא על ידי צוות. הרובוטים נעים באזור פנימי צנוע בגודל חדר מגורים, מסומן בתגים ויזואליים שעוזרים למצלמה מעל לקבוע היכן נמצא כל דבר.
לראות ולחליט בתנועה
ראייה בלבד איננה מושלמת: מצלמת התקרה עלולה לאבד לעיתים את המעקב אחר רובוט לפרקי זמן קצרים, והמדידות שלה מאחרות. כדי לעקוב בזמן אמת אחר המטען המשותף, המערכת משלבת מידע מהמצלמה עם קריאות מאוספי גלגלים וחיישני תנועה קטנים על כל רובוט. שיטת סינון מתמטית מאחדת את האותות האלה לאומדן אמין אחד של מיקום העצם הנישא ותנועתו. מעל שכבת החישה הזו, כל רובוט מריץ את הבקר החזוי שלו. במקום להגיב רק לרגע הנוכחי, הבקר מסתכל זמן קצר קדימה, ובודק אפשרויות תנועה מול גבולות בטיחות כגון מגבלות מהירות, מרווח בין הרובוטים, וכמה קרוב מותר להם להתקרב למכשולים.
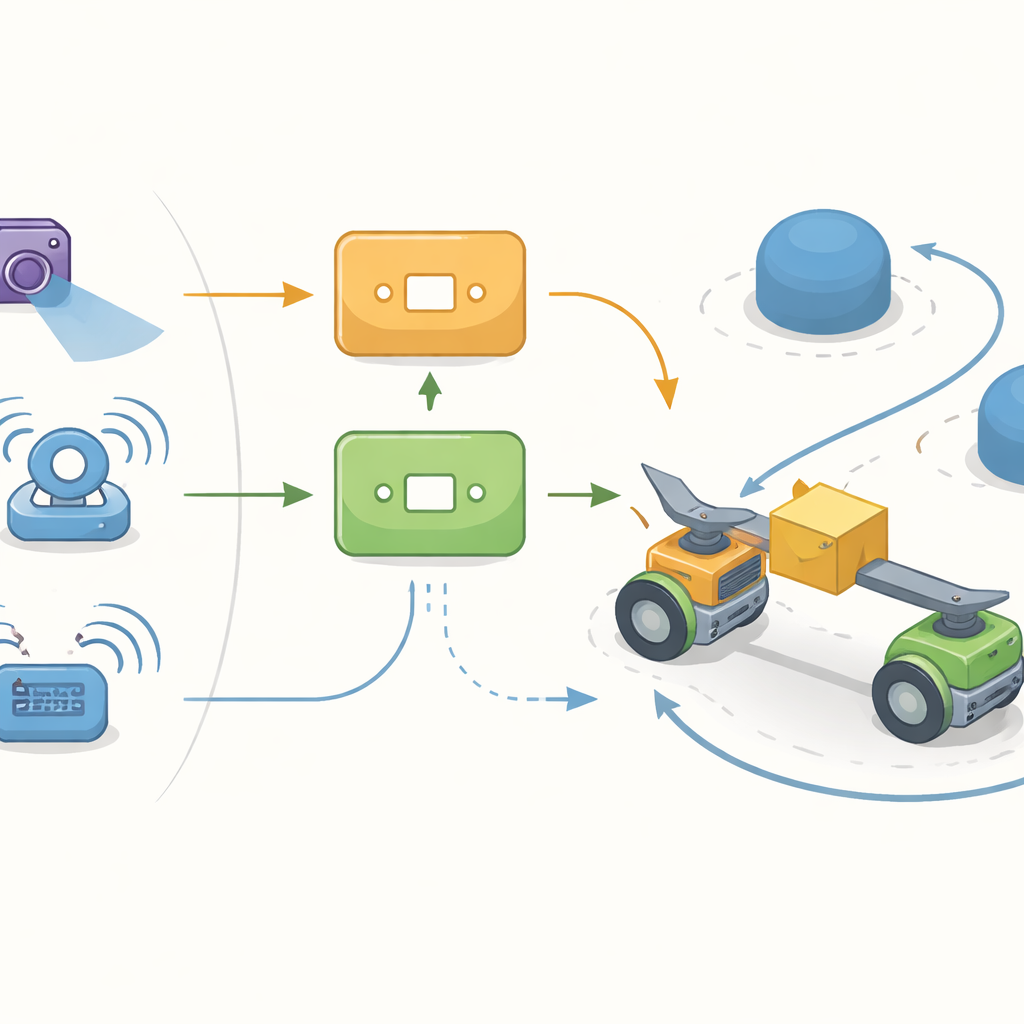
שיתוף פעולה ללא שיחה מתמדת
למרות שהרובוטים חייבים לשתף פעולה, הם אינם מתקשרים באופן רציף. הם מחליפים מידע רק כאשר המרווח היחסי או הכיוון שלהם מתרחקים יותר מדי ממה שמצופה. בין הפיצוצי תקשורת אלה, כל רובוט משתמש בתצפית האחרונה שלו על שותפו ובונה מרווחי בטיחות כדי להימנע מהתנגשויות. הבקר גם מתאים את סדרי העדיפויות שלו בזמן אמת: כאשר הנתיב המבוקש מתעקל חזק או שיש מכשולים בקרבה, הוא מתמקד יותר בלשמור על נתיב מתוכנן ולשמור על קוהרנטיות היצירה, וקצת פחות בלדאוג לרכות התנועה. כאשר הנתיב מתיישר, הוא מרפה את העדיפויות הללו כדי להפחית עומס על המנועים ולשמור על תנועה חלקה.
להציב את השיטה למבחן
הצוות העמיד את הרובוטים במספר ניסויים: תנועה מנקודה לנקודה, עקיבה אחרי קווים ישרים ומעגלים, ולעקוב אחרי נתיב בצורת אינפיניטי הן עם והן בלי מכשולים בדרך. בכל מקרה הם השוו גרסה בסיסית של הבקר לגרסה אדפטיבית שיכולה לכוונן את סדרי העדיפויות שלה תוך כדי פעולה. האסטרטגיה האדפטיבית שמרה על הפלטפורמה הנישאת הרבה יותר קרובה לנתיב המבוקש—שיפור דיוק של כ־חד/חמישית עד שליש—בעוד עדיין כיבדה את כל מגבלות הבטיחות על מרווחים, התארכות המפרקים ומהירות וסל''ד הגלגלים. אפילו על מחשב צנוע, כל רובוט הצליח להשלים חישובים מספיק מהר כדי לעדכן את החלטות התנועה שלו עשר פעמים בשנייה, והשאיר מספיק רזרבה לתפעול בזמן אמת.
מה משמעות הדבר לצוותי רובוטים עתידיים
עבור לא‑מומחים, המסר העיקרי הוא שעכשיו אפשרי לצוותים של רובוטים קטנים וזולים לשאת מטענים משותפים בבטחה ובדיוק בלי להסתמך על בקר מרכזי יחיד. באמצעות שילוב נתוני מצלמה וחיישנים פנימיים ומתן יכולת לכל רובוט לחזות ולמקסם את תנועתו בעודו מתקשר עם שותפו רק לפי הצורך, המערכת משיגה שינוע חלק ומדויק גם במרחבים צפופים. עבודת צוות מבוזרת בזמן אמת מסוג זה יכולה לעזור לרובוטים עתידיים במשימות כגון העברת מלאי, סיוע באיזורי אסון, או תצורת רצפות ייצור מחדש עם פחות פיקוח אנושי ועמידות גבוהה יותר לתקלות.
ציטוט: Muhammed, I., Nada, A.A. & El-Hussieny, H. Real-time decentralized model predictive control for cooperative multi-robot object transport: experimental validation. Sci Rep 16, 9824 (2026). https://doi.org/10.1038/s41598-026-41881-w
מילות מפתח: שיתוף פעולה בין רובוטים, שינוע עצמים, בקרת מודל חזויה, בקרה מבוזרת, רובוטים ניידים