Clear Sky Science · ar
التحكم التنبؤي اللامركزي في الزمن الحقيقي لنقل الأجسام بواسطة فرق من الروبوتات: تحقق تجريبي
الروبوتات تتعاون لحمل الحمولة
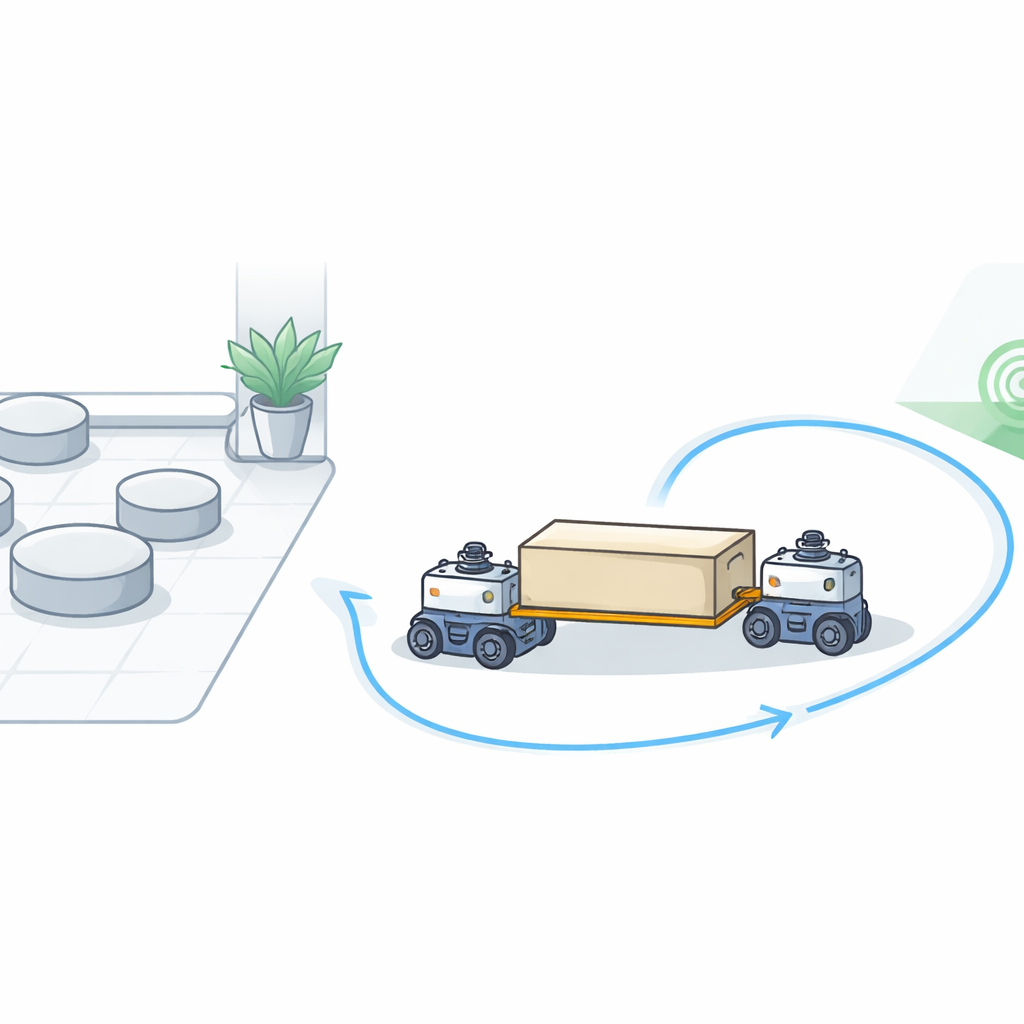
تخيّل مستودعاً حيث تتعاون روبوتات متنقلة صغيرة بدل البشر لحمل الصناديق عبر زوايا ضيقة وبين الرفوف—دون الاصطدام ببعضها أو بالعوائق المجاورة. تُظهر هذه الورقة كيف يمكن لروبوتين من هذا النوع أن يشتركا في حمل جسم ثقيل وتحريكه بسلاسة وبأمان في الزمن الحقيقي، حتى عندما تكون حساساتهم مضطربة ورؤيتهم للعالم غير كاملة.
لماذا مشاركة الحمولة صعبة
جعل عدة روبوتات تحمل نفس الجسم أصعب بكثير من إخبار روبوت واحد إلى أين يذهب. يجب على الآلات الاتفاق على موضع الحمولة المشتركة، والحفاظ على مسافة آمنة بينها، وتفادي الاصطدام بالجدران أو العوائق، وكل ذلك أثناء الاستجابة السريعة للتغيرات. تعتمد الطرق التقليدية غالباً على كمبيوتر مركزي واحد يرى كل شيء ويُعطي أوامر لكل روبوت. هذا الترتيب يمكن أن يكون هشاً: إذا فشل الدماغ المركزي أو رابط الاتصال، قد ينهار الفريق بأكمله. يستكشف المؤلفون بدلاً من ذلك نهجاً «لامركزياً» حيث يتخذ كل روبوت قراراته بنفسه ولكنه لا يزال يتصرف كجزء من فريق منسق.
زوج روبوتات في العالم الحقيقي
لاختبار أفكارهم، بنى الباحثون جهازاً فعلياً باستخدام روبوتين صغيرين جاهزين تجارياً معروفين باسم TurtleBot3. كل روبوت مزود بعجلتين مُحرِّكتين ويحمل جزءاً من منصة خفيفة من الأكريليك. الروبوتان متصلان بهذه المنصة المشتركة عبر وصلات مُصممة خصيصاً يمكنها أن تدور وتمتد، محاكية كيف يمكن أن ينحني أو يتحرك جسم حقيقي عند حمله من قبل فريق. تتحرك الروبوتات في منطقة داخلية متواضعة بحجم غرفة معيشة تقريباً، مُعلَّمة بعلامات بصرية تساعد كاميرا فوقية على تحديد مواضع كل شيء.
الرصد واتخاذ القرار أثناء الحركة
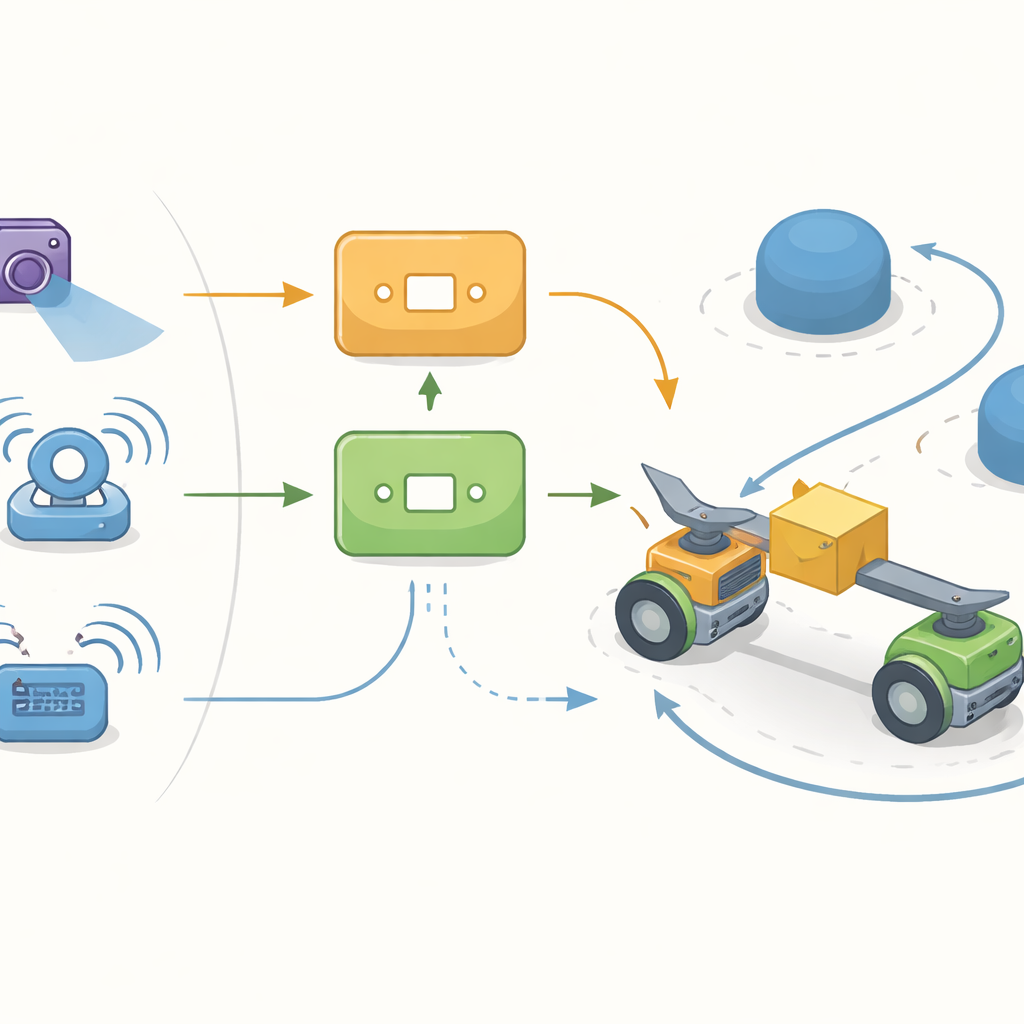
الرؤية بمفردها ليست مثالية: يمكن للكاميرا العلوية أن تفقد رؤية روبوت لفترة وجيزة، وقياساتها متأخرة زمنياً. للحفاظ على تتبع الحمولة المشتركة في الزمن الحقيقي، يدمج النظام معلومات الكاميرا مع قراءات من مشفرات العجلات وحساسات صغيرة للحركة على كل روبوت. طريقة ترشيح رياضية تُنعِم هذه الإشارات إلى تقدير واحد وموثوق لمكان الجسم المحمول وكيفية حركته. فوق طبقة الاستشعار هذه، يشغّل كل روبوت متحكماً تنبؤياً خاصاً به. بدلاً من التفاعل مع اللحظة الحالية فقط، ينظر المتحكم قليلاً إلى المستقبل، مفحّصاً الخيارات الحركية المحتملة مقابل حدود السلامة مثل قيود السرعة، والمسافات بين الروبوتات، ومدى السماح بالقرب من العقبات.
التعاون دون محادثة مستمرة
على الرغم من أن الروبوتات يجب أن تتعاون، إلا أنها لا تتواصل باستمرار. تشارك المعلومات فقط عندما تنحرف المسافات أو الاتجاهات النسبية عنها كثيراً عما هو متوقع. بين هذه دفعات الاتصال، يستخدم كل روبوت آخر صورة له عن شريكه ويُضمّن هوامش أمان ليبقى بعيداً عن الاصطدامات. كما يضبط المتحكم أولوياته أثناء الحركة: عندما ينحني المسار بشدة أو تكون العقبات قريبة، يركّز تلقائياً أكثر على التمسك بالمسار المخطط والحفاظ على التشكيل محكماً، ويقلل قليلاً التركيز على جعل الحركة أكثر نعومة. عندما يستقيم المسار، يخفف هذه الأولويات لتقليل إجهاد المحركات والحفاظ على سلاسة الحركة.
اختبار الطريقة
عرض الفريق الروبوتات لسلسلة من التجارب: الانتقال من نقطة إلى أخرى، رسم خطوط مستقيمة ودوائر، واتباع مسار على شكل رقم ثمانية سواء مع وجود عقبات أو بدونها. في كل حالة، قارنوا نسخة أساسية من المتحكم مع النسخة التكيفية التي تستطيع ضبط أولوياتها أثناء التنفيذ. حافظت الاستراتيجية التكيفية على المنصة المحمولة أقرب بكثير إلى المسار المقصود—محسنة الدقة بنحو خُمس إلى ثُلث تقريباً—مع الاستمرار في احترام جميع حدود السلامة المتعلقة بالمسافات، وتمدد الوصلات، ومدى سرعة دوران العجلات أو تغير سرعتها. حتى على كمبيوتر متواضع، تمكن كل روبوت من إتمام حساباته بسرعة كافية لتحديث قرارات حركته عشر مرات في الثانية، متروكاً هامشاً كافياً للتشغيل في الزمن الحقيقي.
ماذا يعني هذا لفرق الروبوتات المستقبلية
للغير متخصصين، الخلاصة أن الآن أصبح من الممكن لفرق من الروبوتات الصغيرة والرخيصة أن تنقل أحمالاً مشتركة بأمان ودقة دون الاعتماد على متحكم مركزي واحد. عبر دمج بيانات الكاميرا والحساسات المدمجة والسماح لكل روبوت بالتنبؤ وتحسين حركته مع التحدث إلى شريكه فقط عند الحاجة، يحقق النظام نقلًا سلساً ودقيقاً حتى في المساحات المزدحمة. مثل هذا التعاون اللامركزي والزمني الحقيقي قد يساعد الروبوتات المستقبلية في مهام مثل نقل المخزون، والمساعدة في مناطق الكوارث، أو إعادة تكوين أرضيات المصانع مع إشراف بشري أقل ومتانة أعلى في مواجهة الأعطال.
الاستشهاد: Muhammed, I., Nada, A.A. & El-Hussieny, H. Real-time decentralized model predictive control for cooperative multi-robot object transport: experimental validation. Sci Rep 16, 9824 (2026). https://doi.org/10.1038/s41598-026-41881-w
الكلمات المفتاحية: تعاون عدة روبوتات, نقل الأجسام, التحكم التنبؤي النموذجي, التحكم اللامركزي, الروبوتات المتنقلة