Clear Sky Science · fr
Contrôle prédictif de modèle décentralisé en temps réel pour le transport coopératif d’objets par plusieurs robots : validation expérimentale
Des robots qui s’associent pour porter la charge
Imaginez un entrepôt où de petits robots mobiles, et non des personnes, se coordonnent pour transporter des caisses en passant des virages serrés et entre des rayonnages — sans se heurter entre eux ni aux obstacles environnants. Cet article montre comment deux robots de ce type peuvent partager un objet lourd et le déplacer de manière fluide et sûre en temps réel, même lorsque leurs capteurs sont bruités et que leur perception du monde est imparfaite.
Pourquoi partager la charge est difficile
Faire porter le même objet par plusieurs robots est bien plus compliqué que dire à un seul robot où aller. Les machines doivent se mettre d’accord sur la position du chargement partagé, conserver une distance de sécurité entre elles et éviter de heurter des murs ou des obstacles, tout en réagissant rapidement aux changements. Les approches traditionnelles reposent souvent sur un ordinateur central unique qui voit tout et ordonne à chaque robot ce qu’il doit faire. Cette architecture peut être fragile : si le cerveau central ou le lien de communication lâche, l’ensemble de l’équipe peut s’effondrer. Les auteurs explorent plutôt une approche « décentralisée » dans laquelle chaque robot prend ses propres décisions tout en se comportant comme membre d’une équipe coordonnée.
Une paire de robots en conditions réelles
Pour tester leurs idées, les chercheurs ont construit un dispositif physique à l’aide de deux petits robots du commerce appelés TurtleBot3. Chaque robot a deux roues motrices et supporte une partie d’une plateforme légère en acrylique. Les deux robots sont reliés à cette plateforme partagée par des articulations spécialement conçues qui peuvent pivoter et s’étirer, reproduisant la manière dont un objet réel peut fléchir ou se déplacer quand il est porté par une équipe. Les robots évoluent dans une zone intérieure modeste de la taille d’un salon, marquée par des marqueurs visuels qui aident une caméra placée en hauteur à déterminer où se trouve chaque élément.
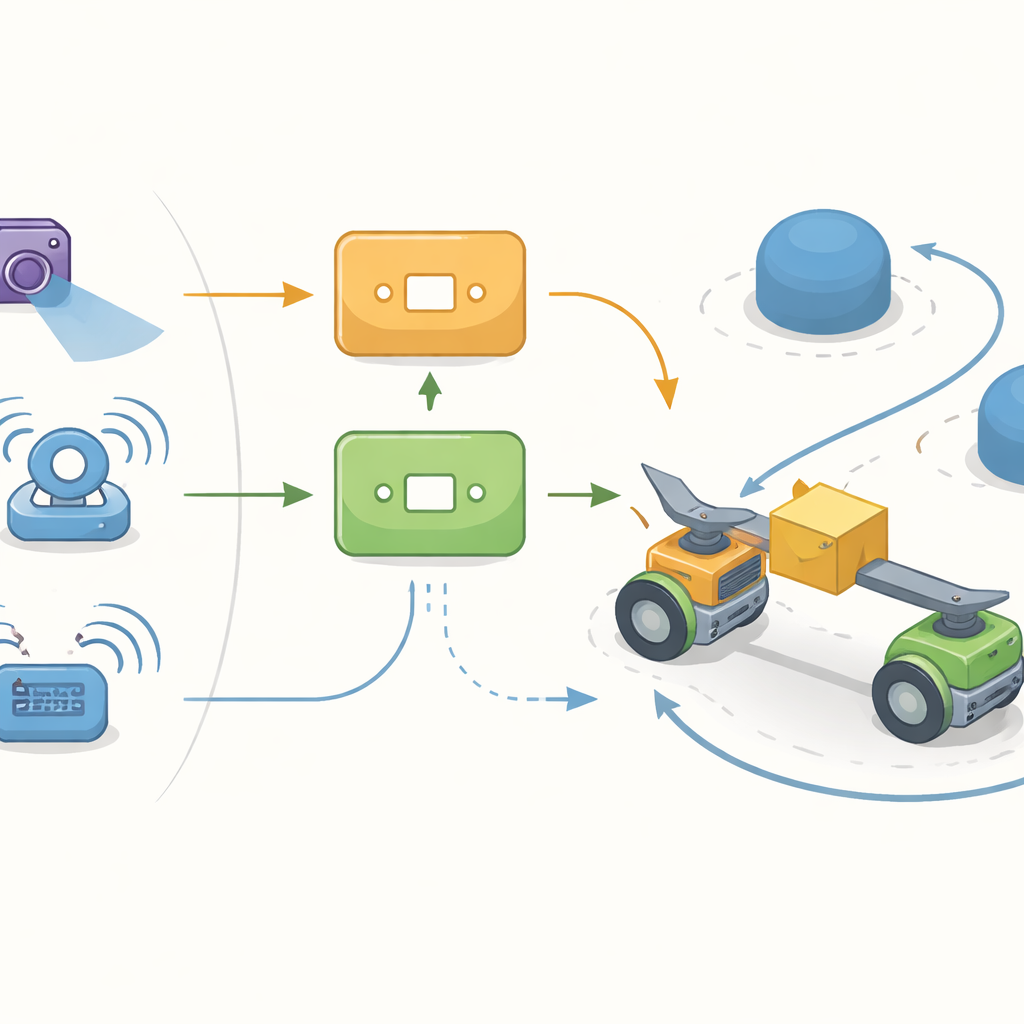
Voir et décider en mouvement
La vision seule n’est pas parfaite : la caméra en hauteur peut perdre brièvement la trace d’un robot et ses mesures sont retardées. Pour suivre la charge partagée en temps réel, le système fusionne les informations de la caméra avec les relevés des codeurs de roues et de petits capteurs de mouvement présents sur chaque robot. Une méthode mathématique de filtrage lisse ces signaux en une estimation unique et fiable de la position et du mouvement de l’objet transporté. Au‑dessus de cette couche de perception, chaque robot exécute son propre contrôleur prédictif. Plutôt que de réagir uniquement à l’instant présent, le contrôleur regarde un court horizon futur, évaluant les choix de mouvement possibles au regard de limites de sécurité telles que les vitesses admissibles, les espacements entre robots et les distances autorisées aux obstacles.
Coopérer sans conversation permanente
Bien que les robots doivent coopérer, ils ne communiquent pas en continu. Ils n’échangent des informations que lorsque leur écart relatif ou leur orientation s’écarte trop de ce qui est attendu. Entre ces salves de communication, chaque robot se base sur sa dernière estimation de son partenaire et intègre des marges de sécurité pour éviter les collisions. Le contrôleur ajuste aussi ses priorités en temps réel : lorsque la trajectoire désirée présente un virage serré ou que des obstacles sont proches, il privilégie automatiquement le maintien de la route planifiée et la cohésion de la formation, et accorde un peu moins d’importance à l’adoucissement optimal du mouvement. Quand la trajectoire redevient rectiligne, il relâche ces priorités pour réduire la sollicitation des moteurs et lisser les mouvements.
Éprouver la méthode
L’équipe a soumis les robots à une série d’essais : déplacement d’un point à un autre, tracés de lignes droites et de cercles, et suivi d’une trajectoire en forme de huit avec et sans obstacles. Dans chaque cas, ils ont comparé une version basique du contrôleur à la version adaptative capable de retoucher ses priorités en cours d’exécution. La stratégie adaptative a maintenu la plateforme transportée beaucoup plus proche de la trajectoire souhaitée — améliorant la précision d’environ un cinquième à un tiers — tout en respectant toutes les limites de sécurité sur les espacements, l’extension des articulations et la vitesse ou l’accélération des roues. Même sur un ordinateur modeste, chaque robot pouvait effectuer ses calculs assez rapidement pour mettre à jour ses décisions de mouvement dix fois par seconde, laissant une marge suffisante pour une exploitation en temps réel.
Ce que cela signifie pour les équipes de robots de demain
Pour les non‑spécialistes, la conclusion est que des équipes de petits robots peu coûteux peuvent désormais transporter des charges partagées de façon sûre et précise sans dépendre d’un contrôleur central unique. En fusionnant les données de la caméra et des capteurs embarqués, et en laissant chaque robot prédire et optimiser son propre mouvement tout en n’échangeant des informations avec son partenaire que lorsque cela est nécessaire, le système permet un transport fluide et précis même dans des espaces encombrés. Ce type de travail d’équipe décentralisé et en temps réel pourrait aider de futurs robots à accomplir des tâches comme déplacer des stocks, intervenir en zones sinistrées ou reconfigurer des ateliers, avec moins de supervision humaine et une meilleure résilience aux pannes.
Citation: Muhammed, I., Nada, A.A. & El-Hussieny, H. Real-time decentralized model predictive control for cooperative multi-robot object transport: experimental validation. Sci Rep 16, 9824 (2026). https://doi.org/10.1038/s41598-026-41881-w
Mots-clés: coopération multi‑robots, transport d’objets, contrôle prédictif de modèle, contrôle décentralisé, robots mobiles